一种智能把手、控制系统以及适用于多种地形的小车的制作方法
本发明涉及智能控制,具体涉及一种智能把手、控制系统以及适用于多种地形的小车。
背景技术:
1、目前,虽然各种各样的交通方式发展了起来,但是在地形复杂的区域,例如山、草地等,在运输物品时,大多仍然靠牲畜或者人力,现已有的设备,在崎岖地方来说,越野能力不强。
2、专利cn201410720379.3公开了一种山地水果运输小车,包括车架、行走机构和果箱,其中,行走机构设置在车架的底部,果箱设置在车架的上部,所述果箱包括至少两个层叠在一起的箱体,每个箱体由外箱、由隔震材料制成的中间隔震层以及内箱构成;所述行走机构和车架之间设有避震器,该避震器由多个竖向设置的避震器构成,每个避震器包括避震弹簧、上连接件和下连接件,其中,上连接件设置在车架上,下连接件设置在行走机构上,所述避震弹簧的上下两端分别与上连接件和下连接件连接。
3、上述专利虽然解决了复杂环境物品运输的问题,但是其小车的控制方式还主要是靠的人力运输,其消耗体力大、且运输效率低。且小车内缺少智能控制系统,存在灵活性差,操作困难,难以控制等缺点。因此,亟需一种应用于复杂地形的智能智能把手、控制系统以及适用于多种地形的小车。
技术实现思路
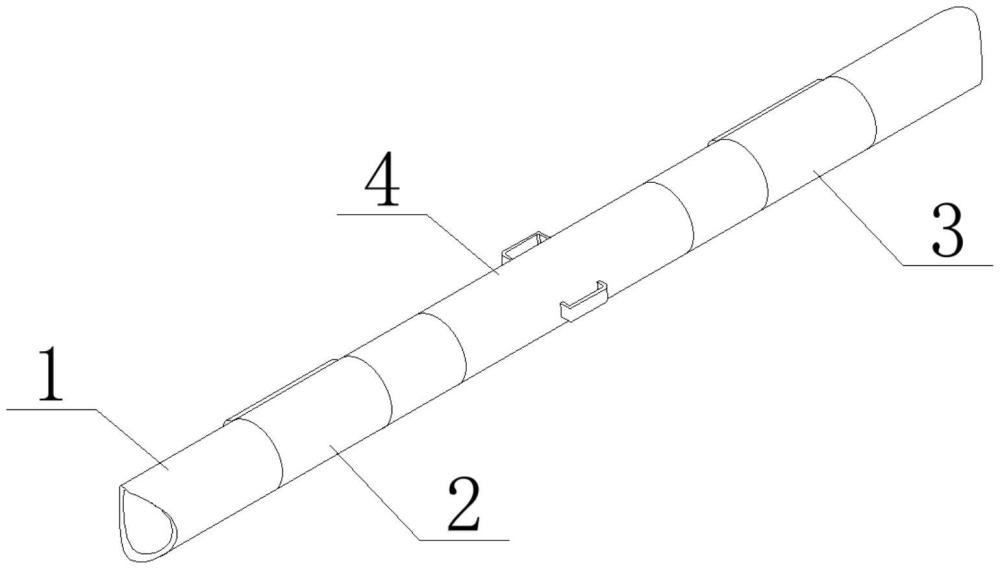
1、针对现有技术的不足,本发明设计了一种智能把手,包括:把手主管以及安装在把手主管上的第一控制件、第二控制件和第三控制件;其中,把手主管为空心圆管结构;第一控制件和第二控制件分别为空心圆环结构,第一控制件可旋转安装在把手主管的一端,第二控制件可旋转安装在把手主管的另一端;第三控制件安装在把手主管的中心位置。
2、优选的,第三控制件包括外环和内环;外环和内环分别为空心圆环结构,且外环设在内环的外侧;内环的外侧面上设有控制环,控制环至少包括两条沿着内环的外侧面环向延伸的环形结构,至少两条环形结构在内环的中心位置的两侧相对设置;至少两条环形结构的外侧面与外环的内侧面相连接。
3、优选的,环形结构的数量为2n条,其中,内环的中心位置的两侧各设有n条环形结构。
4、优选的,环形结构采用环形压力传感器。
5、优选的,第一控制件可单向旋转安装在把手主管的一端,第二控制件可双向旋转安装在把手主管的另一端;或者,第一控制件可双向旋转安装在把手主管的一端,第二控制件可单向旋转安装在把手主管的另一端。
6、基于同一设计思想,本发明还提供了一种控制系统,包括智能把手、第一子控制系统、第二子控制系统、第一开关和移动系统;智能把手的第一控制件和第二控制件与第一子控制系统相连接;智能把手的第三控制件与第二子控制系统相连接;移动系统通过第一开关与第一子控制系统或第二子控制系统相连接。
7、优选的,移动系统包括转向系统和动力系统。
8、优选的,第一子控制系统根据第一控制件和第二控制件的旋转方向及角度控制转向系统和动力系统。
9、优选的,第二子控制系统包括信号接收器、信号处理器、第二开关和信号传输器;第三控制件的控制环与信号接收器相连接;信号接收器与信号处理器相连接,信号处理器包括正向处理和反向处理,第二开关用于控制信号处理器正向处理和反向处理;信号处理器与信号传输器相连接;信号传输器用于控制转向系统和动力系统。
10、基于同一设计思想,本发明还提供了一种适用于多种地形的小车,包括的控制系统。
11、与最接近现有技术相比,本发明的有益效果在于:
12、1、本发明第一控制件和第二控制件其中一个为单向旋转安装在所述把手主管的一端,另一个为双向旋转安装在所述把手主管的另一端,其中,单向旋转的控制件用于控制动力系统,双向旋转的控制件用于控制转向系统,第一子控制适用于比较平缓的路段,人员可以站立在小车上,一个手控制行进速度,另一个手控制行进方向。
13、2、本发明第三控制件的外环和内环对控制环进行挤压,控制环将被挤压的数据通过信号接收器传送给信号处理器,信号处理器通过控制环将被挤压的数据计算出此时小车的行近速率和行进方向,并通过信号传输器传送给转向系统和动力系统。此结构具体包括两种应用方式,第一种是人在前车在后,可通过一个绳子捆绑在人员的身上,绳子的另一端与外环相连接,在人员向前移动时,会通过绳子带动外环挤压控制环,这样人员在前进时拉动小车并不会费力,且小车能够跟随人员转动。另一种应用方式为车在前人在后,可通过一个绳子捆绑在人员的身上,绳子的另一端与外环相连接,这样小车可以给人员一个助力,可以协助人员攀爬山路,但是由于此种状态控制环的挤压逻辑与第一种状态的控制环的挤压逻辑是相反的,因此设置了第二开关对挤压的数据进行反向处理,这样人员在后面就能控制小车的方向和速率。
技术特征:
1.一种智能把手,其特征在于,包括:把手主管(1)以及安装在所述把手主管(1)上的第一控制件(2)、第二控制件(3)和第三控制件(4);
2.如权利要求1所述的智能把手,其特征在于,所述第三控制件(4)包括外环(41)和内环(42);
3.如权利要求2所述的智能把手,其特征在于,所述环形结构的数量为2n条,其中,所述内环(42)的中心位置的两侧各设有n条环形结构。
4.如权利要求2所述的智能把手,其特征在于,所述环形结构采用环形压力传感器。
5.如权利要求1所述的智能把手,其特征在于,所述第一控制件(2)可单向旋转安装在所述把手主管(1)的一端,所述第二控制件(3)可双向旋转安装在所述把手主管(1)的另一端;
6.一种控制系统,其特征在于,包括如权利要求1-4任一项所述的智能把手、第一子控制系统、第二子控制系统、第一开关和移动系统;
7.如权利要求6所述的控制系统,其特征在于,所述移动系统包括转向系统和动力系统。
8.如权利要求7所述的控制系统,其特征在于,所述第一子控制系统根据第一控制件(2)和第二控制件(3)的旋转方向及角度控制转向系统和动力系统。
9.如权利要求7所述的控制系统,其特征在于,所述第二子控制系统包括信号接收器、信号处理器、第二开关和信号传输器;
10.一种适用于多种地形的小车,其特征在于,包括权利要求6所述的控制系统。
技术总结
本发明公开了一种智能把手、控制系统以及适用于多种地形的小车,智能把手上的第一控制件和第二控制件配合控制小车的行进速度和行进方向,适用于比较平缓的路段,人员可以站立在小车上。或者通过智能把手上的第三控制件控制小车的行进速度和行进方向,人在前车在后时人员向前移动时,会通过绳子带动外环挤压控制环,这样人员在前进时拉动小车并不会费力,且小车能够跟随人员转动,或者车在前人在后时小车可以给人员一个助力,可以协助人员攀爬山路,人员在后面就能控制小车的方向和速率。
技术研发人员:刘鑫,苏本龙
受保护的技术使用者:北京信成筑业防护设备科技有限公司
技术研发日:
技术公布日:2025/1/23
- 还没有人留言评论。精彩留言会获得点赞!