无人车及装货方法与流程
本发明涉及无人配送,尤其涉及无人车及装货方法。
背景技术:
1、无人车物流配送是近年来随着自动驾驶技术的快速发展而兴起的一种新型物流配送方式。它利用计算机、人工智能、大数据及通信网络等技术,完成无人车配送任务,极大地提升配送效率,降低人工成本。
2、目前,在无人车配送过程中,经过站点需要货物的装卸,在装卸过程中,每个站点需要安装和配置专用的自动化装卸设备或者采用人工操作装卸设备,又或者完全采用人工装卸的方式将货物进行装卸。
3、以上方式在货物的装卸过程中,对站点的配置需求高,装卸效率较低,且人工的作业强度和作业成本较高。
技术实现思路
1、本发明的目的在于提供一种无人车及装货方法,用于解决现有的无人车配送过程中,货物装卸对站点的配置需求高、效率低,且人工作业强度和作业成本较高的问题。
2、为达此目的,本发明采用以下技术方案:
3、无人车,用于对货箱进行装卸,包括:
4、车体;
5、驱动源,设于所述车体,所述驱动源为所述车体的移动提供动力;
6、传动机构,所述驱动源与所述传动机构连接;
7、操作臂,所述传动机构与所述操作臂传动连接,所述操作臂的末端设有挂接部,所述挂接部用于钩挂所述货箱,所述驱动源能带动所述传动机构,并使所述操作臂曳拽所述货箱至所述车体。
8、作为一种无人车的可选方案,所述车体包括框架,所述操作臂包括第一杆和与所述第一杆成角度连接的第二杆,所述第一杆铰接于所述框架,所述挂接部设于所述第二杆远离所述第一杆的一端。
9、作为一种无人车的可选方案,所述货箱的底部设有导轨,所述框架上设有导向轮,当所述操作臂曳拽所述货箱至所述车体的过程中,所述导向轮能与所述导轨滑动配合,所述导向轮朝外的一侧设有挡板,所述挡板用于限位所述货箱侧壁。
10、作为一种无人车的可选方案,所述框架上间隔设有多个支撑块,当所述操作臂曳拽所述货箱至所述车体时,所述货箱抵压于所述支撑块。
11、作为一种无人车的可选方案,所述传动机构包括传动杆和滑块,所述传动杆的一端铰接于所述第一杆,所述传动杆的另一端铰接于所述滑块,所述滑块与所述驱动源传动连接,所述驱动源能带动所述滑块沿着所述框架滑动。
12、作为一种无人车的可选方案,所述传动机构还包括同步链条,所述驱动源与所述滑块通过所述同步链条传动连接。
13、作为一种无人车的可选方案,所述挂接部为可拆卸连接于所述操作臂的挂钩,所述货箱的侧壁上朝外凸设能与所述挂钩挂接配合的提手。
14、装货方法,基于以上任一方案的无人车,包括:
15、所述操作臂朝所述货箱的方向翻转并钩挂于所述挂接部;
16、所述操作臂曳拽所述货箱,使所述货箱靠近所述车体的一侧脱离地面;
17、所述操作臂继续曳拽所述货箱,使所述货箱底部接触所述车体;
18、所述操作臂继续曳拽所述货箱,使所述货箱底部滑动挤压所述车体并使所述货箱完全脱离地面。
19、作为一种装货方法的可选方案,在所述操作臂钩挂所述挂接部的步骤前,可通过移动所述车体靠近所述货箱。
20、作为一种装货方法的可选方案,当所述操作臂朝所述货箱的方向翻转至极限位置,可通过移动所述车体以使所述操作臂靠近并挂接所述挂接部。
21、有益效果:
22、本发明的第一方面中,驱动源可以为整个无人车的行驶提供动力,也能为传动机构提供装卸货物的动力,采用单一驱动源进行多种动力输出,能够降低成本和整个无人车的体积。驱动源带动传动机构,并使操作臂曳拽货箱至车体,操作臂通过挂机部与货箱可灵活连接。该无人车对货箱的装卸操作不再依靠站点配置和提供相应的专用自动化装卸设备,同时也完全避免了人工参与操作的装卸设备,也能完全摆脱人力装卸的方式,从而有效提升了在无人车物流配送的过程中,装卸货物的适应性,提升了装卸的效率,降低了人工作业强度和人工作业成本。
23、本发明的第二方面中,通过驱动源正向和反向带动操作臂,能使货箱被装入车体或卸货至地面,从而使整个装货和卸货的过程不需要过多的人力参与,也避免了站点需要设置的专用的装卸设备,提升了装货的效率。
技术特征:
1.无人车,用于对货箱(100)进行装卸,其特征在于,包括:
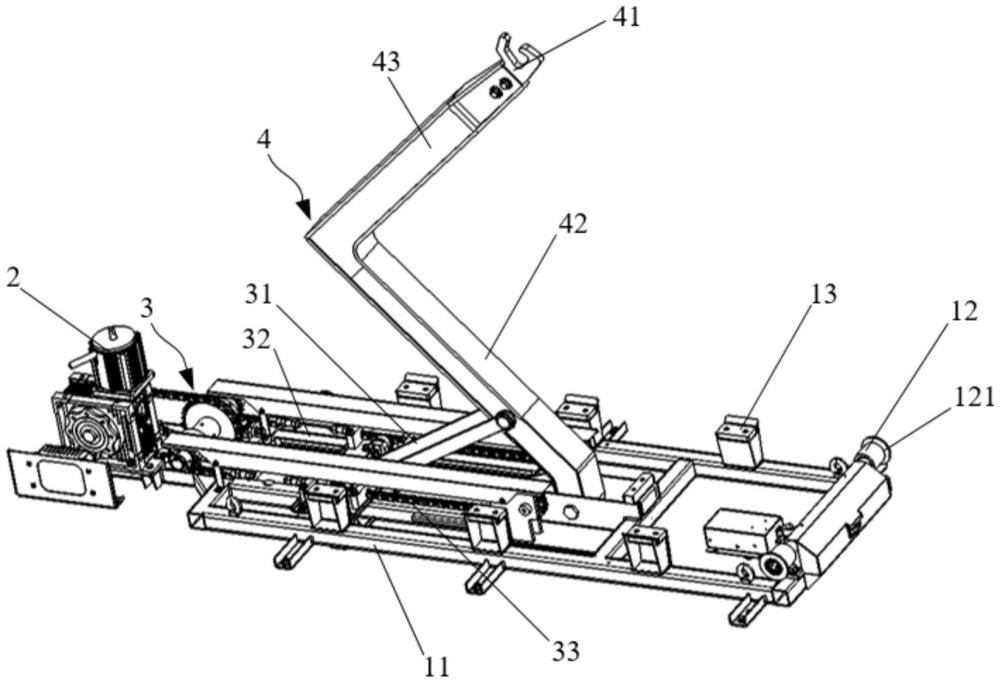
2.根据权利要求1所述的无人车,其特征在于,所述车体包括框架(11),所述操作臂(4)包括第一杆(42)和与所述第一杆(42)成角度连接的第二杆(43),所述第一杆(42)铰接于所述框架(11),所述挂接部(41)设于所述第二杆(43)远离所述第一杆(42)的一端。
3.根据权利要求2所述的无人车,其特征在于,所述货箱(100)的底部设有导轨(120),所述框架(11)上设有导向轮(12),当所述操作臂(4)曳拽所述货箱(100)至所述车体的过程中,所述导向轮(12)能与所述导轨(120)滑动配合,所述导向轮(12)朝外的一侧设有挡板(121),所述挡板(121)用于限位所述货箱(100)侧壁。
4.根据权利要求2所述的无人车,其特征在于,所述框架(11)上间隔设有多个支撑块(13),当所述操作臂(4)曳拽所述货箱(100)至所述车体时,所述货箱(100)抵压于所述支撑块(13)。
5.根据权利要求2所述的无人车,其特征在于,所述传动机构(3)包括传动杆(31)和滑块(32),所述传动杆(31)的一端铰接于所述第一杆(42),所述传动杆(31)的另一端铰接于所述滑块(32),所述滑块(32)与所述驱动源(2)传动连接,所述驱动源(2)能带动所述滑块(32)沿着所述框架(11)滑动。
6.根据权利要求5所述的无人车,其特征在于,所述传动机构(3)还包括同步链条(33),所述驱动源(2)与所述滑块(32)通过所述同步链条(33)传动连接。
7.根据权利要求1所述的无人车,其特征在于,所述挂接部(41)为可拆卸连接于所述操作臂(4)的挂钩,所述货箱(100)的侧壁上朝外凸设能与所述挂钩挂接配合的提手(110)。
8.装货方法,其特征在于,基于权利要求1-7任一项所述的无人车,包括:
9.根据权利要求8所述的装货方法,其特征在于,在所述操作臂(4)钩挂所述挂接部(41)的步骤前,可通过移动所述车体靠近所述货箱(100)。
10.根据权利要求8所述的装货方法,其特征在于,当所述操作臂(4)朝所述货箱(100)的方向翻转至极限位置,可通过移动所述车体以使所述操作臂(4)靠近并挂接所述挂接部(41)。
技术总结
本发明属于无人配送技术领域,公开了无人车及装货方法。该无人车用于对货箱进行装卸,该无人车具体包括车体、驱动源、传动机构和操作臂;其中,驱动源设于车体,驱动源为车体的移动提供动力;驱动源与传动机构连接;传动机构与操作臂传动连接,操作臂的末端设有挂接部,挂接部用于钩挂货箱,驱动源能带动传动机构,并使操作臂曳拽货箱至车体。通过本发明,无人车对货箱的装卸操作不再依靠站点配置和提供相应的专用自动化装卸设备,同时也完全避免了人工参与操作的装卸设备,也能完全摆脱人力装卸的方式,从而有效提升了在无人车物流配送的过程中,装卸货物的适应性,提升了装卸的效率,降低了人工作业强度和人工作业成本。
技术研发人员:宋晨
受保护的技术使用者:新石器慧通(北京)科技有限公司
技术研发日:
技术公布日:2024/12/12
- 还没有人留言评论。精彩留言会获得点赞!