线控转向系统、控制方法、车辆及存储介质与流程
本发明属于车辆,具体而言,涉及一种线控转向系统、控制方法、车辆及存储介质。
背景技术:
1、线控取消了转向器与转向盘之间的直接性的硬性连接,使用方向盘转动时产生的电信号,传递给转向驱动电机,由电机驱动转向机进行转向。线控转向提供系统提供可变的传动比,使驾驶员能够通过切换不同的驾驶模式实现不同的传动比;能够提供更平稳的驾驶体验,在不平坦的路面上,该系统可以减少车轮的振动和拉动,使驾驶更安全、舒适;线控转向系统极大的提高了车辆操控灵活性,通过电子控制单元对转向轮进行精准控制。
2、由于线控转向系统必须是冗余的架构,所以对高度集成的电子技术和先进的传感器技术增加了研发和生产难度,而且系统对电源和电子元器件的依赖程度较高,一旦出现故障可能导致转向系统失效,更有可能影响驾驶员的安全。尽管传感器采用了冗余式的架构可以满足一组传感器信号失效的情况下,另一组传感器信号仍可以正常传递,保证线控转向系统正常的工作,但在冗余信号失效的极端情况下,线控转向系统将无法工作,所以信号的失效检测以及执行策略较为重要。
技术实现思路
1、本发明实施例提供了一种线控转向系统、控制方法、车辆及存储介质,以至少解决相关技术中冗余信号失效的极端情况下,线控转向系统将无法工作的技术问题。
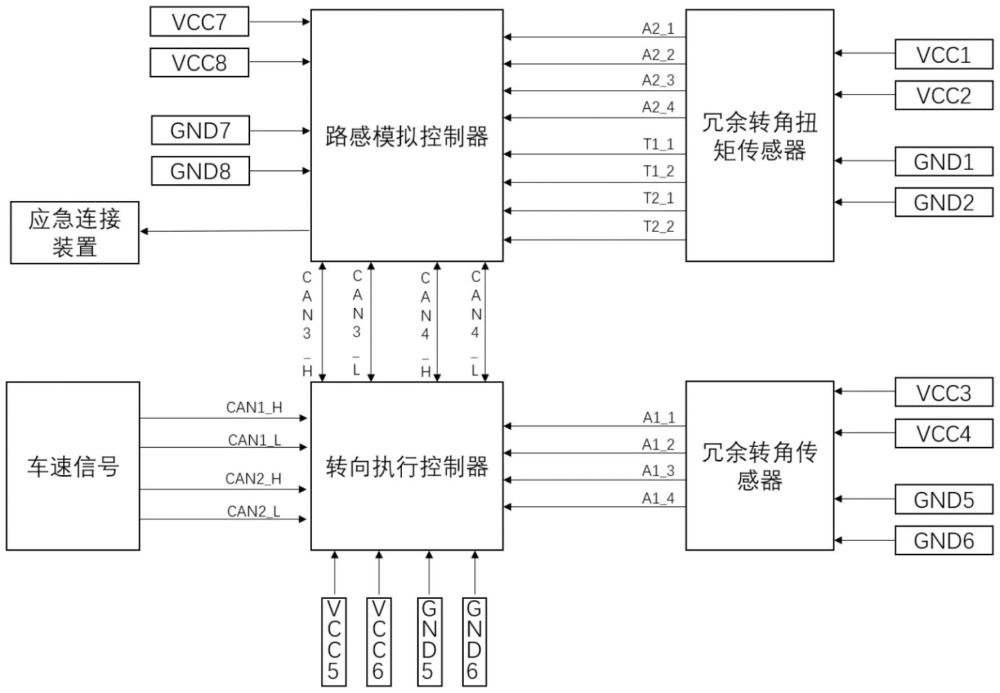
2、根据本发明实施例的第一个方面,提供了一种线控转向系统,包括:冗余式转角扭矩传感器,用于检测驾驶员的转角扭矩信号;冗余式转角传感器,用于检测转向盘的转角信号;路感电机控制器,与冗余式转角扭矩传感器和冗余式转角传感器连接,根据转角扭矩信号和转角信号执行路感模拟策略;转向执行机构控制器,与冗余式转角传感器连接,根据转角信号执行转向控制策略;应急连接装置,在冗余式转角扭矩传感器和冗余式转角传感器中的至少一组传感器信号失效时,实现路感模拟装置与转向执行装置之间的机械连接;整车控制器,输出车速信号给路感电机控制器和转向执行机构控制器;路感电机控制器和转向执行机构控制器包括失效检测逻辑,在冗余式转角扭矩传感器和冗余式转角传感器的信号互验失败时,拉高警告标志位,并根据传感器信号的失效情况转换控制策略。
3、可选的,线控转向系统中车速信号限幅值处理的具体算法包括基于车速信号的动态调整限幅值,并在冗余式转角传感器信号失效时,限幅值自动调整至预设安全范围。
4、可选的,应急连接装置包括内置的电磁离合器和机械锁止机构,当检测到传感器信号失效时,电磁离合器激活,机械锁止机构确保路感模拟装置与转向执行装置之间形成可靠的机械连接。
5、可选的,路感模拟策略和转向控制策略调整的具体算法包括插值法,用于在单一传感器信号失效时,根据另一组传感器的信号进行转向指令的估算与补全。
6、可选的,标志位拉高逻辑包括独立的警告标志位和错误标志位,警告标志位在初步检测到信号异常时激活,错误标志位在确认信号失效时激活,二者触发条件不同,以区分轻微异常和严重故障。
7、可选的,冗余式转角传感器和冗余式转角扭矩传感器的冗余机制包括至少两组传感器,一组为主要传感器,另一组为备用传感器,当主要传感器信号失效时,系统自动切换至备用传感器。
8、可选的,转矩校验方式包括实时比对两组传感器信号的差异,当差异超过预设阈值时,触发校验逻辑,以确定信号的可靠性。
9、可选的,冗余式位移传感器将齿条行程信号转换为转角信号的算法包括基于pid控制的反馈环路,确保转换信号的准确性和实时性。
10、根据本发明实施例的第二方面,还提供一种线控转向系统控制方法,包括:
11、通过冗余式转角扭矩传感器和冗余式转角传感器检测驾驶员的转角扭矩信号和转向盘的转角信号;根据转角扭矩信号和转角信号执行路感模拟策略和转向控制策略;在传感器信号失效时,启动应急连接装置,实现路感模拟装置与转向执行装置之间的机械连接;通过整车控制器输出车速信号给路感电机控制器和转向执行机构控制器;执行失效检测逻辑,当检测到信号互验失败时,拉高警告标志位,并根据传感器信号的失效情况转换控制策略。
12、可选的,控制方法中车速信号限幅值处理的具体步骤包括动态调整限幅值,并在检测到信号失效时,限幅值自动调整至预设安全范围。
13、可选的,应急连接装置的启动逻辑包括在检测到传感器信号失效时,激活内置的电磁离合器和机械锁止机构,形成可靠的机械连接。
14、可选的,控制方法中路感模拟策略和转向控制策略调整的具体步骤包括使用插值法,根据可用的传感器信号估算缺失的转向指令。
15、可选的,标志位拉高逻辑的实现包括独立设置警告标志位和错误标志位,根据信号异常程度分别激活。
16、可选的,控制方法中冗余机制的实施步骤包括检测至少两组传感器的信号,当主要传感器信号失效时,自动切换至备用传感器信号。
17、可选的,控制方法中转矩校验方式的具体步骤包括实时比对两组传感器信号,当差异超过预设阈值时,激活校验逻辑,确保信号的可靠性。
18、可选的,控制方法中齿条行程信号转换为转角信号的具体步骤包括基于pid控制的反馈环路进行转换,以提高信号的准确性和实时性。
19、根据本发明实施例的第三方面,还提供了一种车辆,包括存储器和处理器,存储器中存储有计算机程序,处理器被设置为运行计算机程序以执行上述第一方面任一实施例中所述的线控转向系统控制方法。
20、根据本发明实施例的第四方面,还提供了一种非易失性存储介质,非易失性存储介质中存储有计算机程序,其中,计算机程序被设置为在计算机或处理器上运行时,执行上述第一方面任一实施例中所述的线控转向系统控制方法。
21、根据本发明实施例的第五方面,还提供了一种计算机程序产品,包括计算机程序,计算机程序在被处理器执行时实现上述第一方面任一实施例所述的线控转向系统控制方法。
22、本申请的线控转向系统及其控制方法,通过采用冗余传感器和应急机械连接,显著提高了系统的安全性和可靠性。在传感器信号失效的情况下,系统能够迅速响应,确保驾驶者的控制指令得以准确执行,同时通过限幅值处理和控制策略调整,有效避免了潜在的危险。此外,独立的警告标志位和错误标志位设计,能够更精确地识别和响应系统异常,进一步增强了系统的安全性能。整体上,本方案不仅提升了驾驶体验,还为自动驾驶技术的发展提供了坚实的基础,进而可以解决相关技术中冗余信号失效的极端情况下,线控转向系统将无法工作的技术问题。
技术特征:
1.一种线控转向系统,其特征在于,包括:
2.根据权利要求1所述的线控转向系统,其特征在于,所述车速信号限幅值处理的具体算法包括基于车速信号的动态调整限幅值,并在所述冗余式转角传感器信号失效时,限幅值自动调整至预设安全范围。
3.根据权利要求1所述的线控转向系统,其特征在于,所述应急连接装置包括内置的电磁离合器和机械锁止机构,当检测到传感器信号失效时,电磁离合器激活,机械锁止机构确保路感模拟装置与转向执行装置之间形成可靠的机械连接。
4.根据权利要求1所述的线控转向系统,其特征在于,所述路感模拟策略和转向控制策略调整的具体算法包括插值法,用于在单一传感器信号失效时,根据另一组传感器的信号进行转向指令的估算与补全。
5.根据权利要求1所述的线控转向系统,其特征在于,所述标志位拉高逻辑包括独立的警告标志位和错误标志位,警告标志位在初步检测到信号异常时激活,错误标志位在确认信号失效时激活,二者触发条件不同,以区分轻微异常和严重故障。
6.根据权利要求1的所述的线控转向系统,其特征在于,所述冗余式转角传感器和冗余式转角扭矩传感器的冗余机制包括至少两组传感器,一组为主要传感器,另一组为备用传感器,当主要传感器信号失效时,系统自动切换至备用传感器。
7.根据权利要求1所述的线控转向系统,其特征在于,所述转矩校验方式包括实时比对两组传感器信号的差异,当差异超过预设阈值时,触发校验逻辑。
8.根据权利要求1所述的线控转向系统,其特征在于,所述冗余式位移传感器将齿条行程信号转换为转角信号的算法包括基于pid控制的反馈环路。
9.一种线控转向系统控制方法,其特征在于,包括:
10.根据权利要求9所述的控制方法,其特征在于,所述车速信号限幅值处理的具体步骤包括动态调整限幅值,并在检测到信号失效时,限幅值自动调整至预设安全范围。
11.根据权利要求9所述的控制方法,其特征在于,所述应急连接装置的启动逻辑包括在检测到传感器信号失效时,激活内置的电磁离合器和机械锁止机构,形成可靠的机械连接。
12.根据权利要求9所述的控制方法,其特征在于,所述路感模拟策略和转向控制策略调整的具体步骤包括使用插值法,根据可用的传感器信号估算缺失的转向指令。
13.根据权利要求9所述的控制方法,其特征在于,所述标志位拉高逻辑的实现包括独立设置警告标志位和错误标志位,根据信号异常程度分别激活。
14.根据权利要求9所述的控制方法,其特征在于,所述冗余机制的实施步骤包括检测至少两组传感器的信号,当主要传感器信号失效时,自动切换至备用传感器信号。
15.根据权利要求9所述的控制方法,其特征在于,所述转矩校验方式的具体步骤包括实时比对两组传感器信号,当差异超过预设阈值时,激活校验逻辑。
16.根据权利要求9所述的控制方法,其特征在于,所述齿条行程信号转换为转角信号的具体步骤包括基于pid控制的反馈环路进行转换。
17.一种车辆,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述权利要求9至16任一项中所述的线控转向系统控制方法。
18.一种非易失性存储介质,其特征在于,所述非易失性存储介质中存储有计算机程序,其中,所述计算机程序被设置为在计算机或处理器上运行时,执行上述权利要求9至16任一项中所述的线控转向系统控制方法。
19.一种计算机程序产品,其特征在于,包括计算机程序,所述计算机程序在被处理器执行时实现根据权利要求9至16任一项所述的线控转向系统控制方法。
技术总结
本发明公开了一种线控转向系统、控制方法、车辆及存储介质,包括:冗余式转角扭矩传感器、冗余式转角传感器、路感电机控制器、转向执行机构控制器、应急连接装置和整车控制器。其中,路感电机控制器和转向执行机构控制器基于转角扭矩信号和转角信号执行路感模拟与转向控制策略,整车控制器输出车速信号。在传感器信号互验失败时,应急连接装置激活,形成机械连接,同时标志位拉高,控制策略转换。控制方法涵盖传感器信号检测、策略执行、应急连接启动、标志位拉高逻辑和冗余机制实施。本发明解决了相关技术中冗余信号失效的极端情况下,线控转向系统将无法工作的技术问题。
技术研发人员:王明久,李兴修,雷红亮,刘永传,赵晓瑛,郑燕冬,刘禹昕,陈玺文
受保护的技术使用者:一汽解放汽车有限公司
技术研发日:
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!