用于转向角度控制的标定方法以及计算机可读存储介质与流程
本申请涉及汽车领域,具体而言,涉及一种用于转向角度控制的标定方法以及计算机可读存储介质。
背景技术:
1、在汽车中设有电动转向系统,电动转向系统借助于电动马达来实现汽车的转向。在自动化驾驶、例如无人驾驶中,向转向机控制器输入目标转向角度并且依靠转向机控制器来控制电动马达运转以实现汽车转向,而无需人工、例如驾驶员参与该过程。
2、例如,当驾驶辅助功能激活时,电动转向系统采用转向角度控制算法计算实际电动马达扭矩,用该电动马达扭矩控制实际转向角度,使其与目标转向角度保持一致。转向角度控制算法的控制参数对于该过程起到重要作用。
技术实现思路
1、本申请要解决的主要技术问题是如何对转向角度控制算法进行标定。
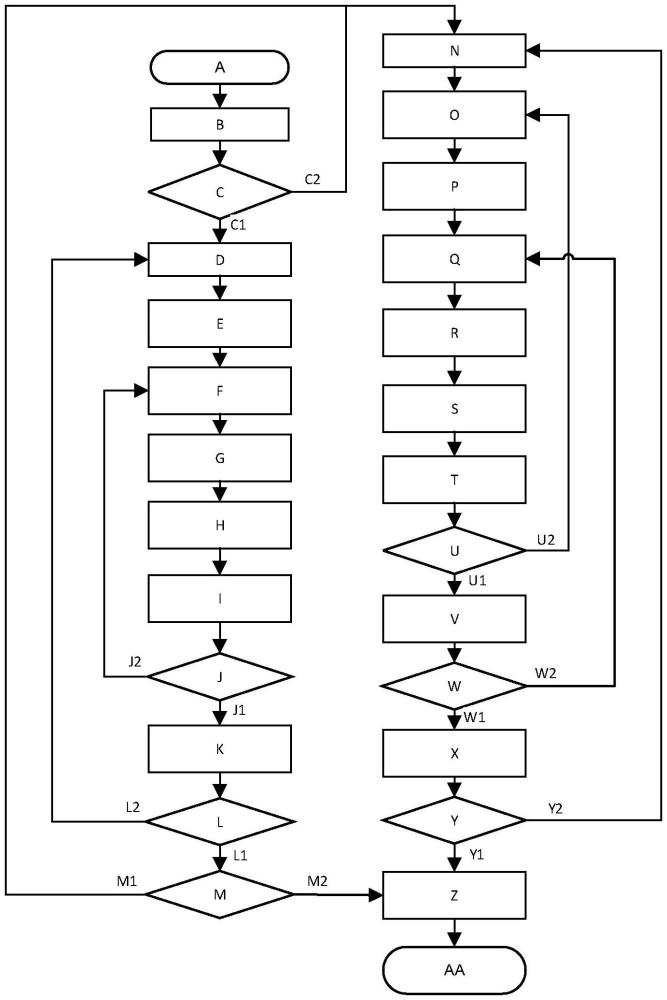
2、为解决上述技术问题,一方面本申请提供用于转向角度控制的标定方法,所述标定方法包括以下步骤:
3、接收车辆行驶工况参数以及车辆配置参数;
4、设置转向角度控制算法的控制参数;
5、接收在该车辆行驶工况参数、车辆配置参数以及转向角度控制算法的控制参数情况下的实际转向角度;
6、根据实际转向角度和目标转向角度的比较来计算响应参数;
7、判断响应参数是否符合设定值,如果是,则记录在该车辆行驶工况参数以及车辆配置参数情况下的转向角度控制算法的控制参数作为合格的控制参数。
8、另一方面本申请提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现前述方法的步骤。
9、根据本申请的技术方案,根据实际转向角度和目标转向角度的比较来计算响应参数,如果响应参数符合设定值,则表明所设置的转向角度控制算法的控制参数是合格的控制参数,从而快速判断采用在该车辆行驶工况参数以及车辆配置参数情况下的控制参数是否能够使得转向机的实际转向角度与目标转向角度保持一致,实现对转向角度控制算法进行标定。
技术特征:
1.一种用于转向角度控制的标定方法,其特征在于,所述标定方法包括以下步骤:
2.根据权利要求1所述的用于转向角度控制的标定方法,其特征在于,所述车辆行驶工况参数包括转向角度和/或车速,所述车辆配置参数包括车辆型号、前轴载荷、前悬类型以及转向机型号中的一种或多种。
3.根据权利要求1所述的用于转向角度控制的标定方法,其特征在于,所述响应参数包括上升时间、超调角度、调整时间和稳态误差中的一种或多种。
4.根据权利要求1所述的用于转向角度控制的标定方法,其特征在于,所述转向角度控制算法是双环比例积分微分控制算法,所述转向角度控制算法的控制参数包括内环比例积分微分参数和/或外环比例积分微分参数。
5.根据权利要求4所述的用于转向角度控制的标定方法,其特征在于,所述内环比例积分微分参数包括内环比例系数、内环积分系数、内环微分系数以及内环积分最大值中的一种或多种,所述外环比例积分微分参数包括外环比例系数、外环积分系数、外环微分系数以及外环积分最大值中的一种或多种。
6.根据权利要求1所述的用于转向角度控制的标定方法,其特征在于,在设置转向角度控制算法的控制参数中,从最小值到最大值,以一定的步长遍历转向角度控制算法的控制参数,以及在判断响应参数符合设定值之后,记录合格的控制参数所对应的响应参数。
7.根据权利要求6所述的用于转向角度控制的标定方法,其特征在于,比较不同的控制参数所对应的响应参数,保留较好的响应参数所对应的控制参数。
8.根据权利要求6所述的用于转向角度控制的标定方法,其特征在于,针对不同的车辆行驶工况参数,分别遍历转向角度控制算法的控制参数并且记录合格的控制参数。
9.根据权利要求1所述的用于转向角度控制的标定方法,其特征在于,
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至9中任一项所述方法的步骤。
技术总结
本申请公开了一种用于转向角度控制的标定方法以及计算机可读存储介质。用于转向角度控制的标定方法包括以下步骤:接收车辆行驶工况参数以及车辆配置参数;设置转向角度控制算法的控制参数;接收在该车辆行驶工况参数、车辆配置参数以及转向角度控制算法的控制参数情况下的实际转向角度;根据实际转向角度和目标转向角度的比较来计算响应参数;判断响应参数是否符合设定值,如果是,则记录在该车辆行驶工况参数以及车辆配置参数情况下的转向角度控制算法的控制参数作为合格的控制参数。根据本申请的用于转向角度控制的标定方法能够实现对转向角度控制算法进行标定。
技术研发人员:王光芒
受保护的技术使用者:博世汽车转向系统(济南)有限公司
技术研发日:
技术公布日:2025/1/16
- 还没有人留言评论。精彩留言会获得点赞!