一种躯干使用变胞十杆机构的六足行走机器人
本发明属于机器人,特别涉及一种躯干使用变胞十杆机构的六足仿生机器人。
背景技术:
1、六足机器人具有结构简单、稳定性高、负载能力强且运动灵活等特点。由于六足机器人自身的高稳定性和对复杂环境的适应性,它们可以用于极端环境下的探索,如深海、火星探测、工业检测等,也可用于完成危险环境中的救援任务。
2、然而传统六足机器人的设计关注点主要集中在腿部结构上,而对躯干部位的结构设计关注较少。传统六足机器人多采用不可动躯干结构,其具有如下缺点:
3、1.刚性躯干结构会限制机器人的运动灵活性,尤其是在狭窄或复杂地形中,机器人可能无法根据地形变化调整身体的姿态,从而影响机器人的运动性能。
4、2.刚性躯干结构的机器人在行走时无法对自身重心位置进行调节,使得机器人行走过程中的稳定性较差,因此控制机身平衡性难度大。
5、3.刚性躯干结构的机器人在面对变化的地形时应变能力较差。可变形躯干结构的机器人可以通过改变躯干形状来适应地形,而刚性躯干结构机器人只能依赖腿部进行调整,从而降低了运动灵活性。
技术实现思路
1、为了解决上述问题,本发明的目的在于提供一种躯干使用变胞十杆机构的六足行走机器人。
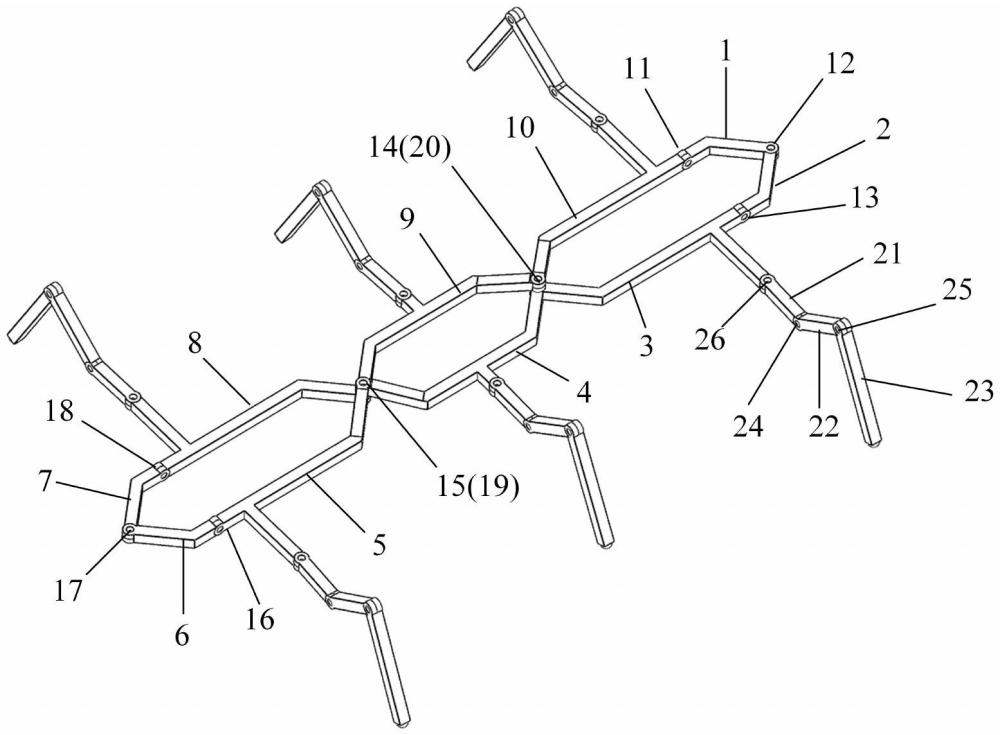
2、为了达到上述目的,本发明提供的躯干使用变胞十杆机构的六足行走机器人包含一条闭链和六条开链;所述闭链是一个由顺次连接的第一杆、第二杆、第三杆、第四杆、第五杆、第六杆、第七杆、第八杆、第九杆和第十杆构成的变胞十杆机构,因此能够在多种构态间进行转换;其中,第一杆的两端分别通过第一转动铰链和第二转动铰链与第十杆的一端和第二杆的一端相连,并且第一转动铰链和第二转动铰链的轴线相互垂直;第七杆的两端分别通过第七转动铰链和第八转动铰链与第六杆的一端和第八杆的一端相连,并且第七转动铰链和第八转动铰链的轴线相互垂直;第三杆的两端分别通过第三转动铰链和第四转动铰链与第二杆的另一端和第四杆的一端相连,并且第三转动铰链和第四转动铰链的轴线相互垂直;第五杆的两端分别通过第五转动铰链和第六转动铰链与第四杆的另一端和第六杆的另一端相连,并且第五转动铰链和第六转动铰链的轴线相互垂直;第九杆的两端分别通过第九转动铰链和第十转动铰链与第八杆的另一端和第十杆的另一端相连,并且第九转动铰链和第十转动铰链的轴线相互平行;所述第一杆和第六杆为具有相同结构且由长臂和短臂构成的单端弯折杆,所述第三杆和第八杆为具有相同结构且由长臂和短臂构成的单端弯折杆,所述第五杆和第十杆为具有相同结构且由长臂和短臂构成的单端弯折杆,所述第七杆和第二杆为具有相同结构且由长臂和短臂构成的单端弯折杆;所述第九杆和第四杆为具有相同结构且对称设置的两端弯折杆,分为三段,第一段和第三段为等长的短臂,第二段为长臂;
3、所述六条开链的结构相同,均包括处于同一平面内的第十一杆、第十二杆和第十三杆;其中第十一杆的一端通过第十二转动铰链与第十二杆的一端相连,第十三杆的一端通过第十三转动铰链与第十二杆的另一端相连,每根第十一杆的另一端通过第十一铰链分别与第三杆、第四杆、第五杆、第八杆、第九杆和第十杆上的长臂相连,第十二转动铰链和第十三转动铰链的轴线相互平行,并且第十二转动铰链和第十一转动铰链的轴线相互垂直。
4、所述单端弯折杆上的长臂和短臂间刚性连接,两臂间夹角为120~150度。
5、所述两端弯折杆上的长臂和短臂间刚性连接,第一段与第二段间的夹角和第三段与第二段间的夹角相等且均为120~150度。
6、本发明提供的躯干使用变胞十杆机构的六足行走机器人具有如下有益效果:
7、1.将变胞机构应用于六足机器人的躯干,使得机器人能够根据不同地形主动调整形态,提升越障能力,尤其在复杂地形中,具备更高的灵活性与稳定性。
8、2.变胞躯干能配合腿部动作进行协调调整,降低运动对腿部的复杂要求,增强机器人的运动灵活性与协调性,尤其在复杂的场景中表现出色。
9、3.变胞躯干能在机器人行走时改变机器人的重心位置,使得机器人行走过程中稳定性较高,从而使控制机身平衡性的难度减小。
10、4.变胞躯干能通过改变姿态来优化负载分布,使得机器人在携带重物执行复杂任务时表现更佳,这种可变形结构能够合理分担应力,减少局部损耗。
技术特征:
1.一种躯干使用变胞十杆机构的六足行走机器人,其特征在于:所述六足行走机器人包含一条闭链和六条开链;所述闭链是一个由顺次连接的第一杆(1)、第二杆(2)、第三杆(3)、第四杆(4)、第五杆(5)、第六杆(6)、第七杆(7)、第八杆(8)、第九杆(9)和第十杆(10)构成的变胞十杆机构,因此能够在多种构态间进行转换;其中,第一杆(1)的两端分别通过第一转动铰链(11)和第二转动铰链(12)与第十杆(10)的一端和第二杆(2)的一端相连,并且第一转动铰链(11)和第二转动铰链(12)的轴线相互垂直;第七杆(7)的两端分别通过第七转动铰链(17)和第八转动铰链(18)与第六杆(6)的一端和第八杆(8)的一端相连,并且第七转动铰链(17)和第八转动铰链(18)的轴线相互垂直;第三杆(3)的两端分别通过第三转动铰链(13)和第四转动铰链(14)与第二杆(2)的另一端和第四杆(4)的一端相连,并且第三转动铰链(13)和第四转动铰链(14)的轴线相互垂直;第五杆(5)的两端分别通过第五转动铰链(15)和第六转动铰链(16)与第四杆(4)的另一端和第六杆(6)的另一端相连,并且第五转动铰链(15)和第六转动铰链(16)的轴线相互垂直;第九杆(9)的两端分别通过第九转动铰链(19)和第十转动铰链(20)与第八杆(8)的另一端和第十杆(10)的另一端相连,并且第九转动铰链(19)和第十转动铰链(20)的轴线相互平行;所述第一杆(1)和第六杆(6)为具有相同结构且由长臂和短臂构成的单端弯折杆,所述第三杆(3)和第八杆(8)为具有相同结构且由长臂和短臂构成的单端弯折杆,所述第五杆(5)和第十杆(10)为具有相同结构且由长臂和短臂构成的单端弯折杆,所述第七杆(7)和第二杆(2)为具有相同结构且由长臂和短臂构成的单端弯折杆;所述第九杆(9)和第四杆(4)为具有相同结构且对称设置的两端弯折杆,分为三段,第一段和第三段为等长的短臂,第二段为长臂;
2.根据权利要求1所述的躯干使用变胞十杆机构的六足行走机器人,其特征在于:所述单端弯折杆上的长臂和短臂间刚性连接,两臂间夹角为120~150度。
3.根据权利要求1所述的躯干使用变胞十杆机构的六足行走机器人,其特征在于:所述两端弯折杆上的长臂和短臂间刚性连接,第一段与第二段间的夹角和第三段与第二段间的夹角相等且均为120~150度。
技术总结
一种躯干使用变胞十杆机构的六足行走机器人。其包括一条闭链和六条开链,闭链是一个由第一至第十杆顺次连接而构成的变胞十杆机构;第一、二、六、七杆长度相同,第三、五、八、十杆长度相同,第四、九杆长度相同,每条开链的结构均相同,开链中的第十一、十二、十三杆均处于同一平面内,每条开链分别通过第十一转动铰链与闭链中的一条杆件相连。本发明将变胞十杆机构作为躯干应用于六足机器人中,利用变胞机构变活动度、变构态的特性,实现六足机器人的躯干变形,提高了六足机器人针对不同复杂场景的适应能力。
技术研发人员:洪振宇,李亚轩,张志旭,高轩,徐子龙,颜金辉
受保护的技术使用者:中国民航大学
技术研发日:
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!