一种带有鸥翼门车厢的无人驾驶物流车的制作方法
本发明属于物流车,更具体地说,特别涉及一种带有鸥翼门车厢的无人驾驶物流车。
背景技术:
1、随着物流行业的快速发展和自动化需求的增加,传统的人工运输模式已经不能满足高效、精准、安全的物流需求,依赖大量人力进行货物的装卸、运输与配送等环节,在面对日益增长的物流业务量时,人工操作不仅效率低下,难以满足现代物流对于快速周转的要求,而且容易出现货物错装、漏装或配送地址错误等问题。
2、无人驾驶物流车作为一种新兴技术,正在逐步替代传统的人工运输方式,具有广阔的应用前景;然而,目前市面上的无人驾驶物流车大多在车厢设计和自动化控制方面以及机动性存在不足,特别是在提高货物装卸效率和车厢模块化设计以及车辆灵活性上有待改进。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种带有鸥翼门车厢的无人驾驶物流车,以解决现有技术中,传统的无人驾驶物流车车厢结构固定,货物装卸过程不够便捷,以及在狭窄通道下的通行能力有限的技术问题。
2、本发明的一种带有鸥翼门车厢的无人驾驶物流车的目的与功效,由以下具体技术手段所达成:
3、一种带有鸥翼门车厢的无人驾驶物流车,包括有底盘组件,所述底盘组件包括有铝合金车架总成,所述铝合金车架总成两端均设置有轮线控转向系统,所述轮线控转向系统两侧通过四轮分布式驱动系统连接有车轮总成;所述铝合金车架总成顶部设置有车厢组件,所述车厢组件包括有车厢主体结构,所述铝合金车架总成顶部设置有所述车厢主体结构,所述车厢主体结构顶部设置有鸥翼门组件,所述鸥翼门组件包括有四组可开关的鸥翼门总成,所述车厢主体结构顶部连接有车厢顶,所述车厢顶两侧均可转动设置有两组所述鸥翼门总成。
4、在一个优选地实施方式中,所述底盘组件还包括有电气电控系统与线控制动系统,所述铝合金车架总成中间位置安装有电池系统,所述铝合金车架总成前端设置有所述电气电控系统,所述铝合金车架总成后端设置有所述线控制动系统;所述铝合金车架总成两侧分别设置有两组双叉独立悬架系统与四组所述车轮总成连接。
5、在一个优选地实施方式中,所述车厢组件还包括有两组侧盖板,所述铝合金车架总成两侧均对应所述电池系统设置有所述侧盖板,所述铝合金车架总成顶部还对应所述电池系统设置有两组可开关的中间检修盖板。
6、在一个优选地实施方式中,所述铝合金车架总成顶部对应所述电气电控系统设置有前检修盖板,所述铝合金车架总成顶部还对应所述线控制动系统设置有后检修盖板。
7、在一个优选地实施方式中,所述铝合金车架总成底部设置有前脸总成与后保险杠,所述前脸总成位于所述铝合金车架总成前端,所述后保险杠位于所述铝合金车架总成后端。
8、在一个优选地实施方式中,所述车厢主体结构上还设置有扫描组件,所述扫描组件包括有两组3d激光雷达,所述车厢主体结构前端设置有两组安装支架,两组所述安装支架底部设置有两组所述3d激光雷达,两组所述3d激光雷达底部均设置有毫米波雷达。
9、在一个优选地实施方式中,所述扫描组件还包括有多组超声波雷达,所述前脸总成一侧设置有多组所述超声波雷达,所述车厢顶上设置有横梁,所述横梁底部设置有两组竖版与所述车厢主体结构连接,所述车厢主体结构一侧与所述横梁两端均设置有定位器;所述横梁两端还均设置有显示屏。
10、与现有技术相比,本发明具有如下有益效果:
11、1.通过四轮分布式驱动系统与轮线控转向系统的设置,铝合金车架总成两端配备的轮线控转向系统,配合四轮分布式驱动系统与车轮总成,使其能够在各种复杂路况下自如穿梭,在狭窄的物流通道或仓储区域,车辆可以通过四轮转向操作,以极小的转弯半径实现灵活转向,有效避免了因传统车辆转向不便而导致的卡滞或碰撞风险,提高了物流作业的流畅性,增强了车辆对不同物流场景的适应性。
12、2.通过鸥翼门组件的设置,在使用该物流车时,在车厢主体结构顶部的四组鸥翼门总成可向上开启,为货物装卸创造了宽敞的空间,与传统的车厢门相比,操作人员无需费力地在狭窄的门口空间内调整货物角度或搬运路径,可直接利用鸥翼门开启后形成的大面积出入口,便捷地使用叉车或其他装卸设备将货物快速进出车厢,提高了单次装卸的效率,而且在频繁装卸货物的物流场景中,能够缩短整体作业时间,减少人力成本和车辆停留时间,从而提升物流配送的整体时效性。
13、3.通过车厢组件的设置,在铝合金车架总成顶部安装有可开关的前检修盖板、中间检修盖板与后检修盖板,当该物流车的某个部件或系统需要检修、维护或更换时,相对应的检修盖板可以方便地打开,维修人员能够快速对对应的部件或系统进行维修,无需进行复杂繁琐的拆解工作,降低了维修难度和时间成本。
14、4.通过扫描组件的设置,在该物流车上安装有两组3d激光雷达、毫米波雷达与多组超声波雷达,它们协同工作,能够实时感知车辆周围的环境信息,无论障碍物的位置、形状、距离都能被捕捉,基于这些环境信息该物流车来规划行驶路线,来避开各种潜在危险,实现稳定可靠的自动驾驶。
技术特征:
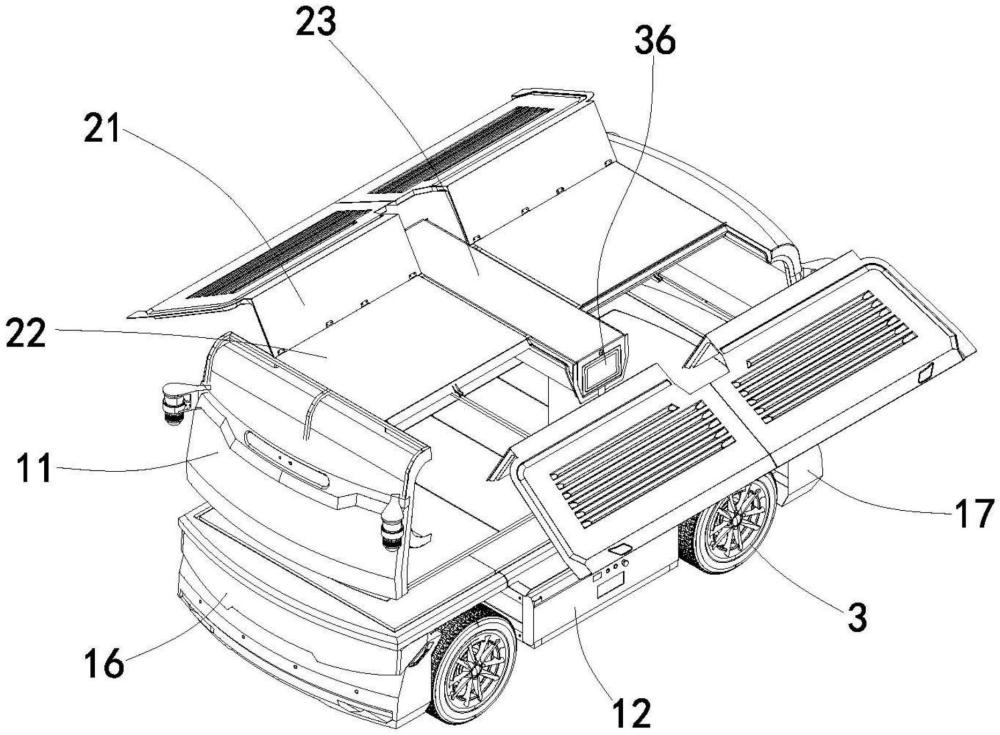
1.一种带有鸥翼门车厢的无人驾驶物流车,其特征在于:包括有底盘组件,所述底盘组件包括有铝合金车架总成(1),所述铝合金车架总成(1)两端均设置有轮线控转向系统(4),所述轮线控转向系统(4)两侧通过四轮分布式驱动系统(3)连接有车轮总成(8);所述铝合金车架总成(1)顶部设置有车厢组件,所述车厢组件包括有车厢主体结构(11),所述铝合金车架总成(1)顶部设置有所述车厢主体结构(11),所述车厢主体结构(11)顶部设置有鸥翼门组件,所述鸥翼门组件包括有四组可开关的鸥翼门总成(21),所述车厢主体结构(11)顶部连接有车厢顶(22),所述车厢顶(22)两侧均可转动设置有两组所述鸥翼门总成(21)。
2.根据权利要求1所述的一种带有鸥翼门车厢的无人驾驶物流车,其特征在于:所述底盘组件还包括有电气电控系统(7)与线控制动系统(2),所述铝合金车架总成(1)中间位置安装有电池系统(6),所述铝合金车架总成(1)前端设置有所述电气电控系统(7),所述铝合金车架总成(1)后端设置有所述线控制动系统(2);所述铝合金车架总成(1)两侧分别设置有两组双叉独立悬架系统(5)与四组所述车轮总成(8)连接。
3.根据权利要求2所述的一种带有鸥翼门车厢的无人驾驶物流车,其特征在于:所述车厢组件还包括有两组侧盖板(12),所述铝合金车架总成(1)两侧均对应所述电池系统(6)设置有所述侧盖板(12),所述铝合金车架总成(1)顶部还对应所述电池系统(6)设置有两组可开关的中间检修盖板(13)。
4.根据权利要求2所述的一种带有鸥翼门车厢的无人驾驶物流车,其特征在于:所述铝合金车架总成(1)顶部对应所述电气电控系统(7)设置有前检修盖板(14),所述铝合金车架总成(1)顶部还对应所述线控制动系统(2)设置有后检修盖板(15)。
5.根据权利要求2所述的一种带有鸥翼门车厢的无人驾驶物流车,其特征在于:所述铝合金车架总成(1)底部设置有前脸总成(16)与后保险杠(17),所述前脸总成(16)位于所述铝合金车架总成(1)前端,所述后保险杠(17)位于所述铝合金车架总成(1)后端。
6.根据权利要求5所述的一种带有鸥翼门车厢的无人驾驶物流车,其特征在于:所述车厢主体结构(11)上还设置有扫描组件,所述扫描组件包括有两组3d激光雷达(31),所述车厢主体结构(11)前端设置有两组安装支架(32),两组所述安装支架(32)底部设置有两组所述3d激光雷达(31),两组所述3d激光雷达(31)底部均设置有毫米波雷达(33)。
7.根据权利要求6所述的一种带有鸥翼门车厢的无人驾驶物流车,其特征在于:所述扫描组件还包括有多组超声波雷达(34),所述前脸总成(16)一侧设置有多组所述超声波雷达(34),所述车厢顶(22)上设置有横梁(23),所述横梁(23)底部设置有两组竖版(24)与所述车厢主体结构(11)连接,所述车厢主体结构(11)一侧与所述横梁(23)两端均设置有定位器(35);所述横梁(23)两端还均设置有显示屏(36)。
技术总结
本发明提供了一种带有鸥翼门车厢的无人驾驶物流车,属于物流车技术领域,包括底盘组件,底盘组件包括有铝合金车架总成,铝合金车架总成两端均设置有轮线控转向系统,轮线控转向系统两侧通过四轮分布式驱动系统连接有车轮总成,车辆可以通过四轮转向操作,以极小的转弯半径实现灵活转向,提高了在狭窄通道下的通行能力;铝合金车架总成顶部设置有车厢组件,车厢组件包括有车厢主体结构,铝合金车架总成顶部设置有车厢主体结构,车厢主体结构顶部设置有鸥翼门组件,鸥翼门组件包括有四组可开关的鸥翼门总成,车厢主体结构顶部连接有车厢顶,车厢顶两侧均可转动设置有两组鸥翼门总成,为货物装卸创造宽敞的空间,方便货物的装卸。
技术研发人员:卿都
受保护的技术使用者:广东嘉腾机器人自动化有限公司
技术研发日:
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!