一种风压吸附爬行检测机器人
本发明涉及高空建筑物质量检测,尤其涉及一种风压吸附爬行检测机器人。
背景技术:
1、桥梁、核电站安全壳表面常需要面对恶劣天气、极端温度、辐射和其他不利条件的考验,因此很容易产生疲劳裂纹、凹坑等表面缺陷,影响建筑物安全,因此需要定期对高空建筑物进行质量检测,高空建筑物表面检测属于质量检测中的一种,是指对建筑物外部表面进行检查和评估的过程,以确保其结构完整性和外观质量。
2、传统建筑物表面检测方法均有各自的不足之处,存在工作效率低下、检测成本较高、检测工艺繁琐等问题,给高空建筑物表面检测工作带来诸多不便,以人工检测为例,工人工作强度大、耗时长、在高空检测时还需要搭建脚手架,安全性不高,且严重依赖检修人员的工作经验,因此,本发明提出一种风压吸附爬行检测机器人用以解决现有技术中存在的问题。
技术实现思路
1、针对上述问题,本发明的目的在于提出一种风压吸附爬行检测机器人,区别于传统的人工目视检测、手持设备检测、无人机检测和大型机械臂携带传感器检测等方式,能针对高空建筑物表面可达性差的区域进行检测,检测精度更高,检测范围更大。
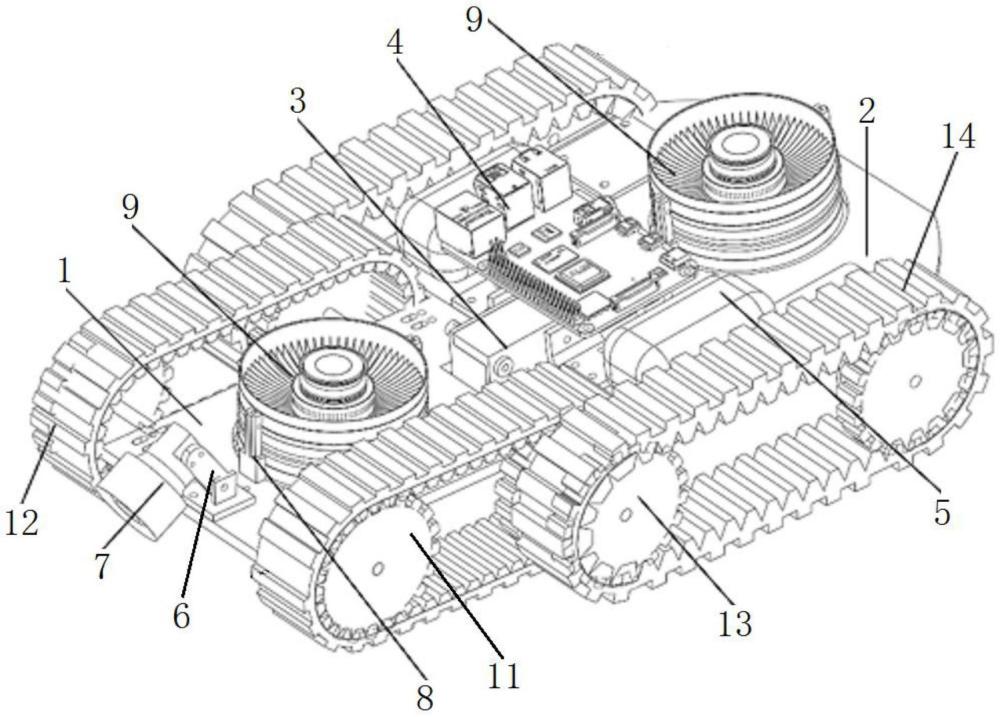
2、为了实现本发明的目的,本发明通过以下技术方案实现:一种风压吸附爬行检测机器人,包括机器人前底盘和机器人后底盘,所述机器人前底盘和机器人后底盘之间连接有折叠越障机构,所述机器人前底盘和机器人后底盘上均设有单向反推力吸附组件,所述机器人前底盘和机器人后底盘两侧分别设有前履带行走组件和后履带行走组件,所述机器人前底盘顶端远离机器人后底盘的一侧设有检测视觉传感组件,所述机器人后底盘顶端固定有可编程主控板和蓄电池。
3、进一步改进在于:所述机器人前底盘和机器人后底盘均采用铝板制成,所述铝板厚度为2.5mm。
4、进一步改进在于:所述检测视觉传感组件包括固定于机器人前底盘顶端的铰接架和通过阻尼铰接件铰接于铰接架上的视觉检测模块,所述视觉检测模块为网络高清摄像头。
5、进一步改进在于:所述单向反推力吸附组件包括涵道支架和固定于涵道支架上的直筒涵道,两组所述涵道支架分别固定于机器人前底盘和机器人后底盘顶端,所述机器人前底盘和机器人后底盘上均开设有与直筒涵道适配的涵道容纳圆孔。
6、进一步改进在于:所述直筒涵道的输入端进气口安装有弧形进气唇,所述直筒涵道附带有电调,两组所述直筒涵道的轴线均沿竖直方向分布。
7、进一步改进在于:所述前履带行走组件包括安装于机器人前底盘前后两侧并呈左右对称分布的前履带轮和套接于左右相邻两组所述前履带轮上的前底板履带,所述前履带轮由机器人前底盘上的直流电机驱动旋转并通过六角联轴器与直流电机的输出端转轴连接。
8、进一步改进在于:所述后履带行走组件包括安装于机器人后底盘前后两侧并呈左右对称分布的后履带轮和套接于左右相邻两组所述后履带轮上的后底板履带,所述后履带轮由机器人后底盘上的直流电机驱动旋转并通过六角联轴器与直流电机的输出端转轴连接。
9、进一步改进在于:所述折叠越障机构为蜗轮蜗杆减速箱,所述机器人前底盘和机器人后底盘相对一侧均开设有与折叠越障机构适配的方形凹槽。
10、本发明的有益效果为:本发明的风压吸附爬行检测机器人整体体积相对较小,质量轻便,且采用双涵道风压原理,可实现任意倾角表面上的稳定吸附,另外具有双底板履带结构,遇到障碍物时可以抬升前底板实现跨越障碍物,通过搭载视觉检测模块在高空建筑物表面上下爬行并开展检测,遇到障碍物具备跨越障碍物能力,具有强环境适应性,从而实现高空建筑物表面三维形貌测量和损上检测定位,极大减轻人工检测作业的负担,具有着广阔的应用前景。
技术特征:
1.一种风压吸附爬行检测机器人,包括机器人前底盘(1)和机器人后底盘(2),其特征在于:所述机器人前底盘(1)和机器人后底盘(2)之间连接有折叠越障机构(3),所述机器人前底盘(1)和机器人后底盘(2)上均设有单向反推力吸附组件,所述机器人前底盘(1)和机器人后底盘(2)两侧分别设有前履带行走组件和后履带行走组件,所述机器人前底盘(1)顶端远离机器人后底盘(2)的一侧设有检测视觉传感组件,所述机器人后底盘(2)顶端固定有可编程主控板(4)和蓄电池(5)。
2.根据权利要求1的一种风压吸附爬行检测机器人,其特征在于:所述机器人前底盘(1)和机器人后底盘(2)均采用铝板制成,所述铝板厚度为2.5mm。
3.根据权利要求1的一种风压吸附爬行检测机器人,其特征在于:所述检测视觉传感组件包括固定于机器人前底盘(1)顶端的铰接架(6)和通过阻尼铰接件铰接于铰接架(6)上的视觉检测模块(7),所述视觉检测模块(7)为网络高清摄像头。
4.根据权利要求1的一种风压吸附爬行检测机器人,其特征在于:所述单向反推力吸附组件包括涵道支架(8)和固定于涵道支架(8)上的直筒涵道(9),两组所述涵道支架(8)分别固定于机器人前底盘(1)和机器人后底盘(2)顶端,所述机器人前底盘(1)和机器人后底盘(2)上均开设有与直筒涵道(9)适配的涵道容纳圆孔(10)。
5.根据权利要求4的一种风压吸附爬行检测机器人,其特征在于:所述直筒涵道(9)的输入端进气口安装有弧形进气唇,所述直筒涵道(9)附带有电调,两组所述直筒涵道(9)的轴线均沿竖直方向分布。
6.根据权利要求1的一种风压吸附爬行检测机器人,其特征在于:所述前履带行走组件包括安装于机器人前底盘(1)前后两侧并呈左右对称分布的前履带轮(11)和套接于左右相邻两组所述前履带轮(11)上的前底板履带(12),所述前履带轮(11)由机器人前底盘(1)上的直流电机驱动旋转并通过六角联轴器与直流电机的输出端转轴连接。
7.根据权利要求1的一种风压吸附爬行检测机器人,其特征在于:所述后履带行走组件包括安装于机器人后底盘(2)前后两侧并呈左右对称分布的后履带轮(13)和套接于左右相邻两组所述后履带轮(13)上的后底板履带(14),所述后履带轮(13)由机器人后底盘(2)上的直流电机驱动旋转并通过六角联轴器与直流电机的输出端转轴连接。
8.根据权利要求1的一种风压吸附爬行检测机器人,其特征在于:所述折叠越障机构(3)为蜗轮蜗杆减速箱,所述机器人前底盘(1)和机器人后底盘(2)相对一侧均开设有与折叠越障机构(3)适配的方形凹槽(15)。
技术总结
本发明公开一种风压吸附爬行检测机器人,涉及高空建筑物质量检测技术领域,包括机器人前底盘和机器人后底盘,机器人前底盘和机器人后底盘之间连接有折叠越障机构,机器人前底盘和机器人后底盘上均设有单向反推力吸附组件;本发明的风压吸附爬行检测机器人整体体积相对较小,质量轻便,且采用双涵道风压原理,可实现任意倾角表面上的稳定吸附,另外具有双底板履带结构,遇到障碍物时可以抬升前底板实现跨越障碍物,通过搭载视觉检测模块在高空建筑物表面上下爬行并开展检测,遇到障碍物具备跨越障碍物能力,具有强环境适应性,从而实现高空建筑物表面三维形貌测量和损上检测定位,极大减轻人工检测作业的负担,具有着广阔的应用前景。
技术研发人员:李锦兴,高雨,张展培,卢光明
受保护的技术使用者:哈尔滨工业大学(深圳)(哈尔滨工业大学深圳科技创新研究院)
技术研发日:
技术公布日:2025/2/20
- 还没有人留言评论。精彩留言会获得点赞!