一种越障球形机器人
本技术涉及球形机器人,具体涉及一种越障球形机器人。
背景技术:
1、作为清洁能源的核能快速发展,核安全与放射性污染防治面临着新的挑战,对核设施、核活动、核材料和放射性物质采取必要和充分的监测至关重要。相较于人工监测,将机器人应用于特殊环境中,可以避免人员暴露在核环境中,因此对能够适应复杂环境核监测机器人的需求越发强烈。
2、传统的核监测机器人如:无人机,波士顿机械狗,履带式小车等环境适应性差,感知能力弱,造价高昂。其中,轮式机器人具有较为传统的机械结构设计,可以实现高速移动,但是存在较大转弯半径,易侧翻,机动性不足;履带式机器人具有较大的牵引力和较强的通过能力,但由于结构限制,在狭小的场景工作效率低。
3、球形机器人具有全封闭外壳,结构小巧,可全向运动等特点,十分契合复杂环境工作的需求。然而,传统的轮式以及摆式球形机器人具有光滑的外壳,越障能力差,欠驱动,无法满足复杂环境越障的工作需求。因此,变结构球形机器人的研究受到国内外学者的广泛关注。作为一种新型的球形机器人,变结构机器人多模态控制系统不完善,控制难度大。
技术实现思路
1、本实用新型的目的在于提供一种越障球形机器人,以解决传统球形机器人越障能力不足的技术问题。
2、为实现上述目的,本实用新型提供了以下技术方案:
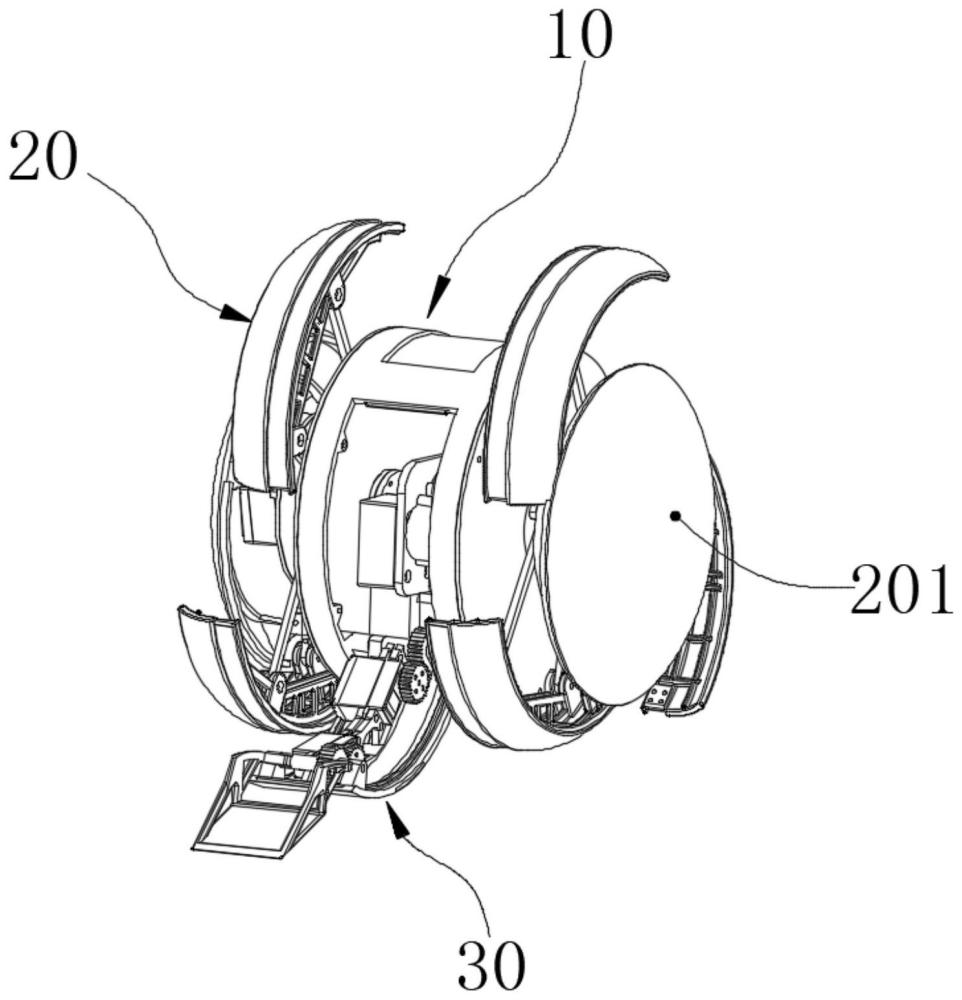
3、本实用新型提供的一种越障球形机器人,包括中部机身以及分别设置于所述中部机身轴向两侧的变形轮;所述中部机身上设置有多个尾翼,多个所述尾翼用于平衡机器人重心以及提供越障支撑;
4、所述中部机身包括机身外壳,所述机身外壳内设置有连接板,所述连接板上分别设置有机身轴和驱动电机,所述驱动电机分别通过主动齿轮和从动齿轮与所述机身轴传动连接;所述机身轴与所述变形轮相连接。
5、可选的或优选的,所述变形轮包括多个变形轮扇叶、旋转齿轮盘、变形轮齿轮密封盘以及变形轮舵机;多个所述变形轮扇叶通过四连杆和平行定杆与所述齿轮密封盘连接;所述变形轮舵机的传动轴通过变形轮舵机齿轮与所述旋转齿轮盘啮合,所述变形轮舵机用于驱动所述四连杆使多个所述变形轮扇叶为展开或关闭状态。
6、可选的或优选的,所述尾翼的设置数量为两个,对称设置在所述中部机身上;
7、所述尾翼包括第一尾翼以及与所述第一尾翼活动连接的第二尾翼,所述第一尾翼通过行星齿轮和太阳齿轮与所述中部机身活动连接;所述第一尾翼上分别设置有第一尾翼舵机和第二尾翼舵机,所述第一尾翼舵机与所述行星齿轮连接,所述第二尾翼舵机通过第二尾翼主动齿轮和第二尾翼从动齿轮与所述第二尾翼传动连接;
8、所述第一尾翼两侧设置有凸条,所述凸条用于提高所述第一尾翼的结构强度。
9、可选的或优选的,所述第二尾翼上形成有放置平台,所述放置平台用于设置配重块。
10、可选的或优选的,所述连接板上还分别设置有齿轮密封圈、滑环密封件、电池固定件;
11、所述连接板上设置有多个安装孔,多个所述安装孔用于安装电路板;
12、所述电池固定件前端还设置有扎线平台,所述扎线平台上设置有多个扎线孔。
13、本实用新型中滑环密封件与机身外壳上部留有充足空间,滑环密封件上可以固定并装载物品。
14、可选的或优选的,所述中部机身与所述变形轮之间还设置有机身隔离板;所述机身隔离板用于连接所述机身外壳与滑环密封件。
15、可选的或优选的,所述机身外壳上还设置有前盖,所述前盖上开设有窗口,所述窗口用于安装图像传输装置。
16、可选的或优选的,所述中部机身与变形轮之间留有空隙,所述空隙用于防止所述变形轮变形时与机身发生干涉。
17、可选的或优选的,所述变形轮的闭合半径大于所述机身外壳的半径;
18、所述变形轮外侧还设置有弧形外壳,所述弧形外壳用于防止机器人侧翻。
19、可选的或优选的,所述越障球形机器人采用非线性滑模控制器。
20、基于上述技术方案,本实用新型至少可以产生如下技术效果:
21、本实用新型提供的一种越障球形机器人结合腿式、轮式以及球形机器人的优势提供了一种可变结构的多模态越障球形机器人,仅通过部署变形轮与尾翼两个部件可实现纯滚动模态、平衡滚动模态以及越障模态的切换。运动方式多样,包括越障、爬坡、滚动、原地转向和弧形转弯等,运动不依赖复杂的算法,驱动力强、稳定性高、可适应多种复杂地形;
22、其中各部件采用模块化设计,相互独立且衔接紧密,有利于产品的安装以及故障的监测和维修;各模块均具有良好的密封性,能够对机器人内部构件起到良好的保护隔离作用;
23、选用滑模控制器有效提高了机器人运动的鲁棒性,非线性扰动观测器有效消除机器人运动过程中的扰动。两者结合,提高机器人运动控制精度,增强运动过程的稳定性,满足复杂环境下机器人高效工作需求。
技术特征:
1.一种越障球形机器人,其特征在于,包括中部机身(10)以及分别设置于所述中部机身(10)轴向两侧的变形轮(20);所述中部机身(10)上设置有多个尾翼(30),多个所述尾翼(30)用于平衡机器人重心以及提供越障支撑;
2.根据权利要求1所述的越障球形机器人,其特征在于,所述变形轮(20)包括多个变形轮扇叶(207)、旋转齿轮盘(205)、变形轮齿轮密封盘(202)以及变形轮舵机(204);多个所述变形轮扇叶(207)通过四连杆(203)和平行定杆与所述齿轮密封盘(202)连接;所述变形轮舵机(204)的传动轴通过变形轮舵机齿轮(206)与所述旋转齿轮盘(205)啮合,所述变形轮舵机(204)用于驱动所述四连杆(203)使多个所述变形轮扇叶(207)为展开或关闭状态。
3.根据权利要求1所述的越障球形机器人,其特征在于,所述尾翼(30)的设置数量为两个,对称设置在所述中部机身(10)上;
4.根据权利要求3所述的越障球形机器人,其特征在于,所述第二尾翼(302)上形成有放置平台,所述放置平台用于设置配重块。
5.根据权利要求1所述的越障球形机器人,其特征在于,所述连接板(107)上还分别设置有齿轮密封圈(113)、滑环密封件(110)、电池固定件(108);
6.根据权利要求1所述的越障球形机器人,其特征在于,所述中部机身(10)与所述变形轮(20)之间还设置有机身隔离板(103);所述机身隔离板(103)用于连接所述机身外壳(101)与滑环密封件(110)。
7.根据权利要求1所述的越障球形机器人,其特征在于,所述机身外壳(101)上还设置有前盖(102),所述前盖(102)上开设有窗口,所述窗口用于安装图像传输装置。
8.根据权利要求1所述的越障球形机器人,其特征在于,所述中部机身(10)与变形轮(20)之间留有空隙,所述空隙用于防止所述变形轮(20)变形时与机身发生干涉。
9.根据权利要求2所述的越障球形机器人,其特征在于,所述变形轮(20)的闭合半径大于所述机身外壳(101)的半径;
10.根据权利要求1所述的越障球形机器人,其特征在于,所述越障球形机器人采用非线性滑模控制器。
技术总结
本技术公开了一种越障球形机器人,属于球形机器人技术领域,以解决传统球形机器人越障能力不足的技术问题。它包括中部机身以及分别设置于所述中部机身轴向两侧的变形轮;中部机身上设置有多个尾翼,多个尾翼用于平衡机器人重心以及提供越障支撑;中部机身包括机身外壳,机身外壳内设置有连接板,连接板上分别设置有机身轴和驱动电机,驱动电机分别通过主动齿轮和从动齿轮与机身轴传动连接;机身轴与变形轮相连接。本技术越障球形机器人解决了传统轮式和摆式球形机器人越障能力不足的问题,同时又兼具传统球形机器人的优点,满足现代复杂环境下侦察的需求,结构紧凑,维护方便。
技术研发人员:王启官,霍建文,杨瑞林,吴迅,赖维,卢昱舟,林锐
受保护的技术使用者:西南科技大学
技术研发日:20240301
技术公布日:2024/10/14
- 还没有人留言评论。精彩留言会获得点赞!