一种用于线控转向的手感模拟器结构的制作方法
本技术涉及汽车配件,特别涉及一种用于线控转向的手感模拟器结构。
背景技术:
1、现有转向执行机构与转向柱为机械连接,转向并未实现完全解耦,既方向盘转动与整车转向存在联动,方向盘转向比与机械结构相关,转向比相对固定,手感通过改变转向助力比调节,无法单独调节,且电机与转向助力共用电机。另外,现有手感模拟器多采用蜗轮蜗杆结构,侧向力大,效率较低。传统的机械连接中,有各种连接机构带来空间限制,使得整个转向的机构占用较大的空间。因此本实用新型进行了一种用于线控转向的手感模拟器结构的研发,以解决现有技术中存在的问题。
技术实现思路
1、本实用新型目的是:提供一种用于线控转向的手感模拟器结构,适用于全解耦线控转向系统,方向柱与转向执行机构无机械连接,模拟器机构为转向提供阻尼手感,以解决现有技术中执行机构与转向柱无法解耦,且占用空间较大等问题。
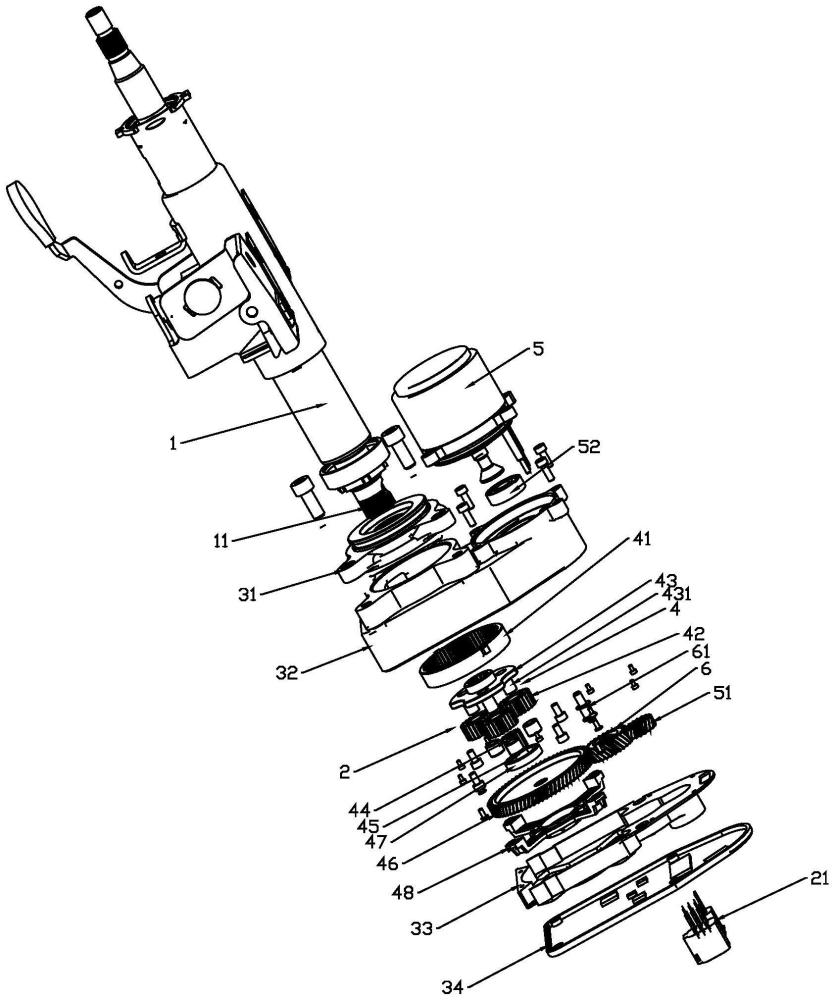
2、本实用新型的技术方案是:一种用于线控转向的手感模拟器结构,包括转向柱和与转向柱连接的减速机构;所述减速机构包括外壳,设置在外壳内的行星齿轮组件,以及与外壳连接的电机;所述行星齿轮组件通过设置在外壳内部的第一齿轮与电机连接;所述减速机构上连接有传感器接口。
3、优选的,所述行星齿轮组件的太阳轮上通过第一转轴连接有第二齿轮;所述第一转轴远离所述太阳轮的一端贯穿第二齿轮且通过第一轴承连接有第一支架。
4、优选的,所述第一支架设置在外壳内部且与外壳固定连接。
5、优选的,所述行星齿轮组件包括外齿圈,所述外齿圈内啮合连接有多个行星轮;多个所述行星轮通过第二支架连接;所述太阳轮同时与多个所述行星轮啮合连接。
6、优选的,所述第二支架中部设置有花键,所述花键与转向柱端部设置的花键轴连接。
7、优选的,所述电机上连接有第三齿轮,所述第三齿轮与第一齿轮啮合连接。
8、优选的,所述外壳包括上盖板、齿轮壳体、固定板和下盖板;所述转向柱的下端贯穿上盖板,且通过转向柱上套设的第二轴承与上盖板连接;所述电机的与上盖板固定连接,且其转子端贯穿上盖板;所述固定板设置在齿轮壳体的内部,所述固定板与所述第一支架连接;所述下盖板与齿轮壳体的下端连接,且所述传感器接口连接在下盖板上。
9、与现有技术相比,本实用新型的优点是:
10、(1)汽车的线控转向系统与传统的汽车转向系统相比,取消了方向盘与转向轮之间的机械连接,完全由电能控制实现转向,摆脱了传统汽车转向系统的各种限制,给汽车转向特性的设计带来更多的空间;
11、(2)减速机构采用平行轴及行星排的结构实现减速,效率高,磨损低;且占用空间更小,便于布置;
12、(3)减速机构提供手感模拟器所需要的反向扭矩,通过电机控制实现手感模拟器的可调,使得布置更加紧凑,传动噪音更低,且转动阻尼手感更加舒适。
技术特征:
1.一种用于线控转向的手感模拟器结构,其特征在于:包括转向柱和与转向柱连接的减速机构;所述减速机构包括外壳,设置在外壳内的行星齿轮组件,以及与外壳连接的电机;所述行星齿轮组件通过设置在外壳内部的第一齿轮与电机连接;所述减速机构上连接有传感器接口。
2.根据权利要求1所述的一种用于线控转向的手感模拟器结构,其特征在于:所述行星齿轮组件的太阳轮上通过第一转轴连接有第二齿轮;所述第一转轴远离所述太阳轮的一端贯穿第二齿轮且通过第一轴承连接有第一支架。
3.根据权利要求2所述的一种用于线控转向的手感模拟器结构,其特征在于:所述第一支架设置在外壳内部且与外壳固定连接。
4.根据权利要求3所述的一种用于线控转向的手感模拟器结构,其特征在于:所述行星齿轮组件包括外齿圈,所述外齿圈内啮合连接有多个行星轮;多个所述行星轮通过第二支架连接;所述太阳轮同时与多个所述行星轮啮合连接。
5.根据权利要求4所述的一种用于线控转向的手感模拟器结构,其特征在于:所述第二支架中部设置有花键,所述花键与转向柱端部设置的花键轴连接。
6.根据权利要求1所述的一种用于线控转向的手感模拟器结构,其特征在于:所述电机上连接有第三齿轮,所述第三齿轮与第一齿轮啮合连接。
7.根据权利要求2所述的一种用于线控转向的手感模拟器结构,其特征在于:所述外壳包括上盖板、齿轮壳体、固定板和下盖板;所述转向柱的下端贯穿上盖板,且通过转向柱上套设的第二轴承与上盖板连接;所述电机的与上盖板固定连接,且其转子端贯穿上盖板;所述固定板设置在齿轮壳体的内部,所述固定板与所述第一支架连接;所述下盖板与齿轮壳体的下端连接,且所述传感器接口连接在下盖板上。
技术总结
本技术涉及汽车配件领域,具体为一种用于线控转向的手感模拟器结构,包括转向柱和与转向柱连接的减速机构;所述减速机构包括外壳,设置在外壳内的行星齿轮组件,以及与外壳连接的电机;所述行星齿轮组件通过设置在外壳内部的第一齿轮与电机连接;所述减速机构上连接有传感器接口。汽车的线控转向系统与传统的汽车转向系统相比,取消了方向盘与转向轮之间的机械连接,完全由电能控制实现转向,摆脱了传统汽车转向系统的各种限制,给汽车转向特性的设计带来更多的空间。
技术研发人员:蒋荣强,丁徐聪,刘文,沈驰,汤勇
受保护的技术使用者:苏州坐标系智能科技有限公司
技术研发日:20240311
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!