一种可变移动方式的巡检机器人的制作方法
本技术涉及巡检机器人,具体涉及一种可变移动方式的巡检机器人,可以显著增加巡检机器人的巡检范围,提高对复杂环境的适应能力。
背景技术:
1、巡检机器人基于光学字符识别和图像识别能力,能够模拟专业的人工操作,可以代替人工在生产场景中进行点击、识别、检查等巡检操作,并可以通过软件进行远程控制,从而实现7×24小时不间断的大范围自动化巡检监控,快速发现和定位问题,大幅降低巡检成本并避免人工巡检过程可能产生的危险。但是目前的巡检机器人移动方式较为单一,而不同环境中最佳移动方式不同,例如较为平整的普通路况适合车轮移动,攀爬或者复杂路况适合履带移动,导致现有巡检机器人对于不同环境的适应能力较差,巡检范围较小,因此需要一种可变移动方式的巡检机器人以实现大范围的高效自动巡检。
技术实现思路
1、本实用新型主要解决的技术问题是提出一种可变移动方式的巡检机器人,能够解决现有巡检机器人巡检范围较小,环境适应能力较差的问题。
2、为了解决上述技术问题,本实用新型提出的一个技术方案是:
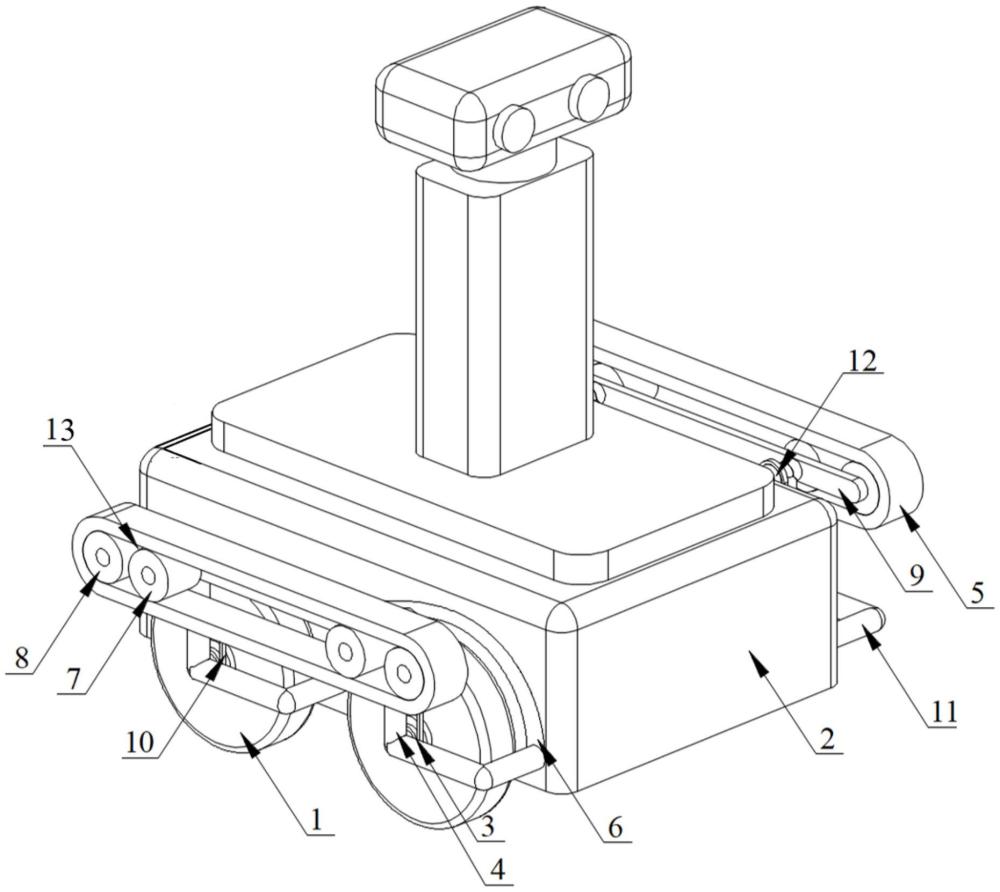
3、一种可变移动方式的巡检机器人,其特征在于:包括圆形车轮1、机器人本体2、固定轴3、固定架4、履带5、环形槽6、驱动轮7、端轮8、固定板9、链条10、支撑轴11、链条轮12、滑轨13、滑块14、电机15、齿轮16和固定块17,圆形车轮1共4个,以2个为一组分布在机器人本体2两侧,圆形车轮1上设置固定轴3,固定轴3通过固定架4和链条10与链条轮12相连,链条轮12与驱动轮7同轴连接并安装在有滑轨13的固定板9上,外侧为端轮8,履带5包裹着驱动轮7和端轮8,固定轴3同时连接支撑轴11,支撑轴11一端顺次连接滑块14、齿轮16、电机15和固定块17并放置在机器人本体2上位于圆形车轮1外的环形槽6中。
4、所述固定轴3位于圆形车轮1圆心处,外端有与链条10配合的轮齿,链条10连接固定轴3和链条轮12,将圆形车轮1的动力传递至链条轮12,固定3同时连接固定架4和支撑轴11,固定架4和支撑轴11垂直布置以保持整体结构稳定。
5、所述驱动轮7和链条轮12同轴连接并设置在固定板9两侧,其中链条轮12位于靠近机器人本体2一侧,固定板9在两端各设置一个端轮8,在驱动轮7处设置有旋转装置,在旋转装置和外端间设置有滑轨13,端轮8尾部位于滑轨13中,通过固定板9两端的转动和端轮8在滑轨13中的滑动可以调节履带5的形状和接触地面的面积,从而显著增强攀爬能力和对环境的适应能力,2个驱动轮7和2个端轮8外有与履带5配合的轮齿,转动连接在固定板9上并位于履带5内,驱动轮7、端轮8和履带5组成履带轮组。
6、所述固定架4的一端与所述固定轴3内部转动连接,不干扰固定轴3的转动,固定架4靠近机器人本体2一端中心处依次设置滑块14、齿轮16、电机15和固定块17,部分滑块14、齿轮16、电机15和固定块17位于环形槽6中,电机15为齿轮16提供动力,环形槽6是以圆形车轮1为圆心的半圆环形,位于机器人本体2两侧,环形槽6与齿轮16接触处设有轮齿,保障滑块14滑动过程的稳定,在环形槽6两端设有与固定块17配合的固定装置,当固定块17到达预设位置时进行固定,从而保证整体结构的稳定。
7、所述一种可变移动方式的巡检机器人拥有使用圆形车轮1的车轮移动方式和使用履带轮组的履带移动方式,通过滑块14在环形槽6中的滑动控制移动方式。以最靠近机器人本体2最前端为右,当滑块14位于环形槽6最右端时,履带轮组位于固定轴3上方,此时圆形车轮1与地面直接接触,巡检机器人为车轮移动方式。当滑块14位于环形槽6最左端时,固定架4将机器人本体2和圆形车轮1抬起并脱离地面,履带轮组位于固定轴3下方,此时履带5与地面直接接触,巡检机器人为车轮移动方式。
技术特征:
1.一种可变移动方式的巡检机器人,其特征在于:包括圆形车轮(1)、机器人本体(2)、固定轴(3)、固定架(4)、履带(5)、环形槽(6)、驱动轮(7)、端轮(8)、固定板(9)、链条(10)、支撑轴(11)、链条轮(12)、滑轨(13)、滑块(14)、电机(15)、齿轮(16)和固定块(17),圆形车轮(1)共4个,以2个为一组分布在机器人本体(2)两侧,圆形车轮(1)上设置固定轴(3),固定轴(3)通过固定架(4)和链条(10)与链条轮(12)相连,链条轮(12)与驱动轮(7)同轴连接并安装在有滑轨(13)的固定板(9)上,外侧为端轮(8),履带(5)包裹着驱动轮(7)和端轮(8),固定轴(3)同时连接支撑轴(11),支撑轴(11)一端顺次连接滑块(14)、齿轮(16)、电机(15)和固定块(17)并放置在机器人本体(2)上位于圆形车轮(1)外的环形槽(6)中。
2.根据权利要求1所述的一种可变移动方式的巡检机器人,其特征在于:所述固定轴(3)位于圆形车轮(1)圆心处,外端有与链条(10)配合的轮齿,链条(10)连接固定轴(3)和链条轮(12),固定轴(3)同时连接固定架(4)和支撑轴(11),固定架(4)和支撑轴(11)垂直布置。
3.根据权利要求1所述的一种可变移动方式的巡检机器人,其特征在于:所述驱动轮(7)和链条轮(12)同轴连接并设置在固定板(9)两侧,其中链条轮(12)位于靠近机器人本体(2)一侧,固定板(9)在驱动轮(7)处设置有旋转装置,并在旋转装置和外端间设置有滑轨(13),端轮(8)尾部位于滑轨(13)中,履带(5)内有2个驱动轮(7)和2个端轮(8),驱动轮(7)和端轮(8)外有与履带(5)配合的轮齿。
4.根据权利要求1所述的一种可变移动方式的巡检机器人,其特征在于:所述固定架(4)的一端与所述固定轴(3)内部转动连接,固定架(4)靠近机器人本体(2)一端中心处依次连接滑块(14)、齿轮(16)、电机(15)和固定块(17),部分滑块(14)、齿轮(16)、电机(15)和固定块(17)位于环形槽(6)中,环形槽(6)是以圆形车轮(1)为圆心的半圆环形,位于机器人本体(2)两侧,环形槽(6)与齿轮(16)接触处设有轮齿,在两端设有与固定块(17)配合的固定装置。
技术总结
本技术公开了一种可变移动方式的巡检机器人,包括圆形车轮、固定架、履带、环形槽和支撑轴,圆形车轮上的固定轴连接固定架和支撑轴,并通过链条连接链条轮,履带内有设置在固定架上的驱动轮和端轮,链条轮同轴连接履带内的驱动轮,支撑轴末端连接有滑块、齿轮、电机和固定块,通过支撑轴在环形槽中的滑动,可以使得巡检机器人在使用圆形车轮或履带的移动方式中变化。本技术通过移动方式的变化,显著增加了巡检机器人的巡检范围和环境适应能力,降低了巡检过程的成本,具有广阔的应用前景。
技术研发人员:王美战,陈剑华,张飞
受保护的技术使用者:陕西商洛发电有限公司
技术研发日:20240321
技术公布日:2024/11/21
- 还没有人留言评论。精彩留言会获得点赞!