一种自动移动机器人
本技术涉及移动机器人,具体为一种自动移动机器人。
背景技术:
1、近年来随着各种材料技术、控制技术的进步,很多公司都在开发了半自主的机器人,更好的服务人类的各种日常生活和工作。一种由传感器、遥控操作器和自动控制器等机构组成的具有移动功能的机器人。能代替人在危险或恶劣环境下进行作业,有更大的机动性和灵活性。分为地面、空中、水面和水下移动机器人,其移动机构有轮式、履带式、足式、混合式、特殊式等类型。
2、发明人在实现本实用新型的过程中发现现有技术存在如下问题:现阶段很多的移动型机器人不具备可抓取物体的功能,实现不了半自动控制的搬运物品。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种自动移动机器人,解决了现阶段很多的移动型机器人不具备可抓取物体的功能,实现不了半自动控制的搬运物品。
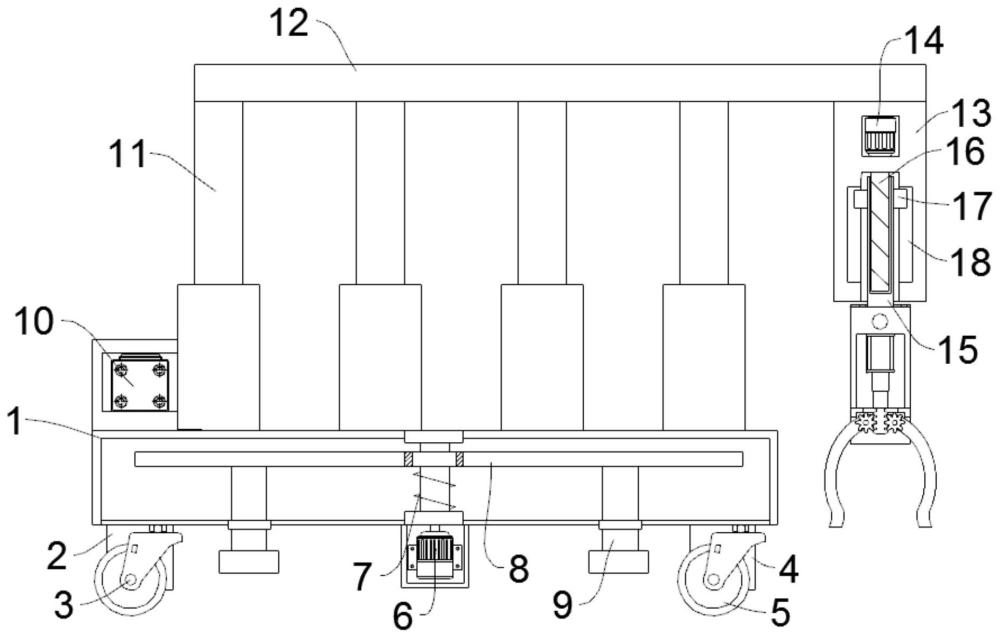
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种自动移动机器人,包括移动箱,所述移动箱的下壁面设有驱动件,所述驱动件的驱动端连接有一对第二移动轮,所述移动箱的下壁面设有导向件,所述导向件的驱动端设有一对第一移动轮,所述移动箱内设有升降机构,所述移动箱的上壁面设有两对支杆,两对所述支杆的上端连接有连接板,所述连接板的一侧下壁面设有圆筒,所述圆筒内设有调节机构,所述圆筒的下端设有连接有夹持机构。
3、优选的,所述升降机构包括安装在所述移动箱下壁面的第一电机,所述第一电机的驱动端设有第一螺纹杆,所述第一螺纹杆转动连接在所述移动箱的上下壁面之间,所述第一螺纹杆上螺纹连接有升降板,所述升降板的下壁面设有两对支脚,两对所述支脚均活动插装在所述移动箱的下壁面内。
4、优选的,所述调节机构包括安装在所述圆筒内的第二电机,所述第二电机的驱动端设有第二螺纹杆,所述第二螺纹杆转动连接在所述圆筒内,所述圆筒内活动插装有套杆,所述套杆上端与所述第二螺纹杆螺纹连接,所述套杆的侧壁面设有一对滑块,所述圆筒的内壁面设有一对滑道,一对所述滑块分别滑动安装在一对所述滑道内。
5、优选的,所述套杆的下端设有调节箱,所述调节箱内设有液压缸,所述液压缸的伸缩端设有双向齿条,所述双向齿条活动插装在所述调节箱的下壁面内,所述调节箱的一侧壁面设有一对侧板,一对所述侧板之间转动连接有一对转轴,一对所述转轴上均设有齿轮和弧形夹持板,一对所述齿轮均与所述双向齿条啮合连接。
6、优选的,所述移动箱的上壁面设有配重块。
7、有益效果
8、本实用新型提供了一种自动移动机器人,本实用新型设计了方便夹持物品运输的结构,首先可同时控制导向件和驱动件,对装置进行移动并实现方向控制,需要固定时,启动第一电机带动两对支脚下移,对地面进行支撑固定,需要抓取物品时,将圆筒移动至物品正上方,启动第二电机带动套杆移动,控制调节箱伸缩带动弧形夹持板旋转,对物品进行夹持固定,配重块用于平衡重量,实现对物品的移动运输。该装置能方便的调节切换固定和移动状态,并且对物品能够夹持固定,方便对物品的运输,增加移动机器人的半自动功能,使用方便,具有较好的实用性。
技术特征:
1.一种自动移动机器人,包括移动箱(1),其特征在于,所述移动箱(1)的下壁面设有驱动件(2),所述驱动件(2)的驱动端连接有一对第二移动轮(3),所述移动箱(1)的下壁面设有导向件(4),所述导向件(4)的驱动端设有一对第一移动轮(5),所述移动箱(1)内设有升降机构,所述移动箱(1)的上壁面设有两对支杆(11),两对所述支杆(11)的上端连接有连接板(12),所述连接板(12)的一侧下壁面设有圆筒(13),所述圆筒(13)内设有调节机构,所述圆筒(13)的下端设有连接有夹持机构。
2.根据权利要求1所述的一种自动移动机器人,其特征在于,所述升降机构包括安装在所述移动箱(1)下壁面的第一电机(6),所述第一电机(6)的驱动端设有第一螺纹杆(7),所述第一螺纹杆(7)转动连接在所述移动箱(1)的上下壁面之间,所述第一螺纹杆(7)上螺纹连接有升降板(8),所述升降板(8)的下壁面设有两对支脚(9),两对所述支脚(9)均活动插装在所述移动箱(1)的下壁面内。
3.根据权利要求1所述的一种自动移动机器人,其特征在于,所述调节机构包括安装在所述圆筒(13)内的第二电机(14),所述第二电机(14)的驱动端设有第二螺纹杆(16),所述第二螺纹杆(16)转动连接在所述圆筒(13)内,所述圆筒(13)内活动插装有套杆(15),所述套杆(15)上端与所述第二螺纹杆(16)螺纹连接,所述套杆(15)的侧壁面设有一对滑块(17),所述圆筒(13)的内壁面设有一对滑道(18),一对所述滑块(17)分别滑动安装在一对所述滑道(18)内。
4.根据权利要求3所述的一种自动移动机器人,其特征在于,所述套杆(15)的下端设有调节箱(19),所述调节箱(19)内设有液压缸(20),所述液压缸(20)的伸缩端设有双向齿条(21),所述双向齿条(21)活动插装在所述调节箱(19)的下壁面内,所述调节箱(19)的一侧壁面设有一对侧板(22),一对所述侧板(22)之间转动连接有一对转轴(23),一对所述转轴(23)上均设有齿轮(24)和弧形夹持板(25),一对所述齿轮(24)均与所述双向齿条(21)啮合连接。
5.根据权利要求1所述的一种自动移动机器人,其特征在于,所述移动箱(1)的上壁面设有配重块(10)。
技术总结
本技术公开了一种自动移动机器人,涉及移动机器人技术领域。包括移动箱,所述移动箱的下壁面设有驱动件,所述驱动件的驱动端连接有一对第二移动轮,所述移动箱的下壁面设有导向件,所述导向件的驱动端设有一对第一移动轮,所述移动箱内设有升降机构,所述移动箱的上壁面设有两对支杆,两对所述支杆的上端连接有连接板,所述连接板的一侧下壁面设有圆筒,所述圆筒内设有调节机构,所述圆筒的下端设有连接有夹持机构。本技术设计了方便夹持物品运输的结构,该装置能方便的调节切换固定和移动状态,并且对物品能够夹持固定,方便对物品的运输,增加移动机器人的半自动功能,使用方便,具有较好的实用性。
技术研发人员:腾超凡,王路平,温斌,张月涛,郭亮
受保护的技术使用者:沈阳航空航天大学
技术研发日:20240429
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!