一种自动驾驶转向系统双伺服电机闭环控制方法及系统
本发明属于自动驾驶,特别是涉及一种自动驾驶转向系统双伺服电机闭环控制方法及系统。
背景技术:
1、随着汽车智能化的发展,自动驾驶技术越来越受到关注。自动驾驶转向系统需要具备高精度、高可靠性和安全性。在实际行驶过程中,车辆面临着各种复杂的路况和环境,如障碍物、不同车速、转向角度等。
2、传统的转向系统在面对这些情况时,往往无法实现精确的控制。例如,在遇到障碍物时,无法准确判断是否可以安全变道,且在转向过程中容易出现失控等情况。
3、现有技术中,一些转向系统采用单伺服电机,其控制精度和响应速度有限,难以满足自动驾驶的需求。同时,传感器技术的发展也为自动驾驶转向系统提供了更多的信息采集手段,但如何将这些信息进行有效整合和利用,也是需要解决的问题。
技术实现思路
1、本发明的目的在于提供一种自动驾驶转向系统双伺服电机闭环控制方法及控制系统,旨在提高自动驾驶车辆在复杂道路环境下的转向精确性和安全性。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
3、本发明为一种自动驾驶转向系统双伺服电机闭环控制方法,包括以下步骤:
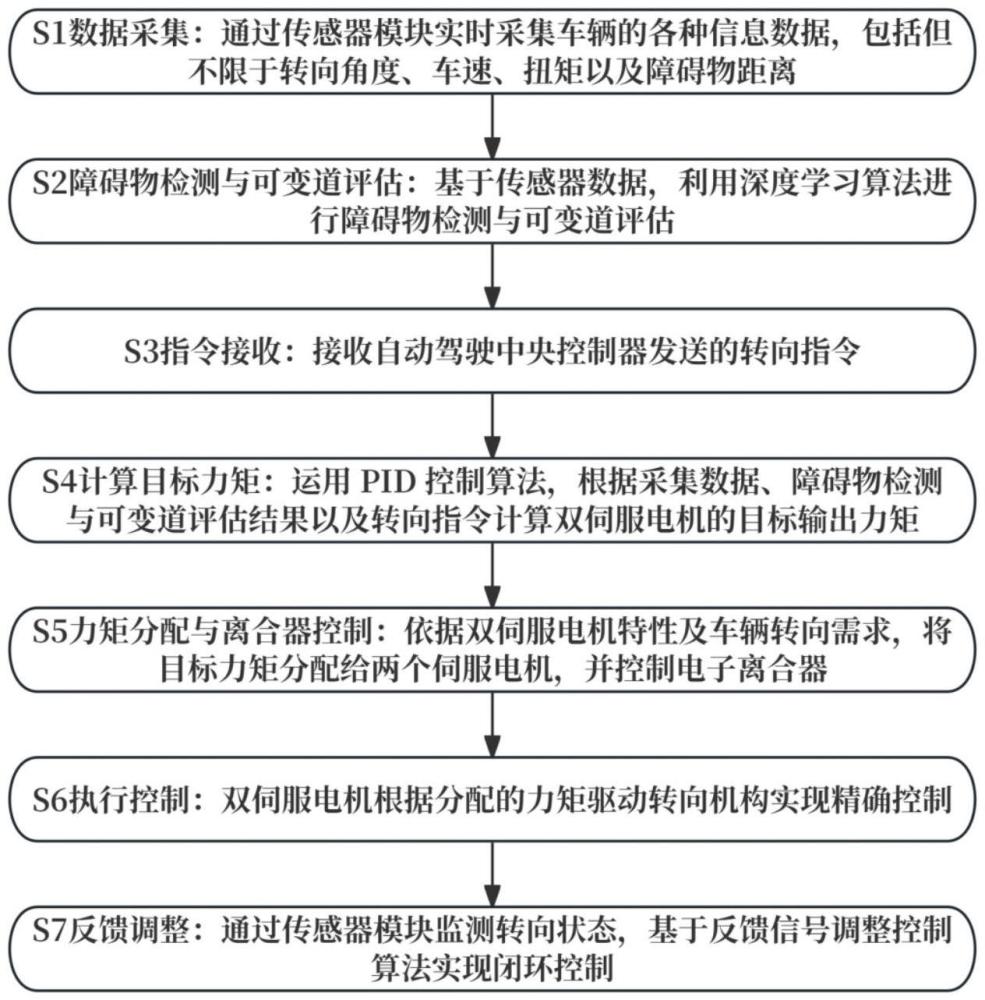
4、s1数据采集:通过传感器模块实时采集车辆的各种信息数据,包括但不限于转向角度、车速、扭矩以及障碍物距离;
5、s2障碍物检测与可变道评估:基于传感器数据,利用深度学习算法进行障碍物检测与可变道评估;
6、s3指令接收:接收自动驾驶中央控制器发送的转向指令;
7、s4计算目标力矩:运用pid控制算法,根据采集数据、障碍物检测与可变道评估结果以及转向指令计算双伺服电机的目标输出力矩;
8、s5力矩分配与离合器控制:依据双伺服电机特性及车辆转向需求,将目标力矩分配给两个伺服电机,并控制电子离合器;
9、s6执行控制:双伺服电机根据分配的力矩驱动转向机构实现精确控制;
10、s7反馈调整:通过传感器模块监测转向状态,基于反馈信号调整控制算法实现闭环控制。
11、作为本发明的一种优选技术方案,所述s1数据采集步骤中,所述传感器模块包括但不限于角度传感器、扭矩传感器、车速传感器、摄像头和电子雷达,所述s2中通过传感器模块获取车辆的数据之后,采用多传感器融合技术,将不同类型传感器获取的信息进行整合,然后进行障碍物检测。
12、作为本发明的一种优选技术方案,所述s2中采用深度学习算法进行可变道评估时具体包括以下步骤:
13、s21数据准备:对采集到的传感器数据进行预处理,包括清洗、去除噪声和异常值;
14、s22特征提取:从传感器数据中提取关键特征,包括但不限于车辆速度、与相邻车道车辆的距离、相邻车道车辆的速度和车辆加速度;
15、s23决策树构建:基于决策树算法,根据特征和决策规则建立可变道评估模型;
16、s24模型训练:利用大量训练数据对决策树模型进行训练,调整模型参数;
17、s25模型评估:通过测试数据对模型进行评估,验证模型的性能;
18、s26决策过程:将传感器数据输入决策树模型,判断是否可变道;
19、s27输出结果:输出可变道评估结果。
20、作为本发明的一种优选技术方案,所述计算目标力矩的pid控制算法包括以下步骤:
21、参数设定:根据车辆的行驶状态和转向需求,设定比例系数kp、积分系数ki和微分系数kd的值;
22、计算过程:根据车辆的行驶状态、转向角度以及障碍物距离,通过公式计算目标力矩m,其计算公式如下:
23、
24、调整过程:根据车辆的实际行驶情况和反馈信号,对p id控制算法进行调整。
25、作为本发明的一种优选技术方案,所述s5包括以下步骤:
26、电机特性分析:配备具有不同的扭矩输出特性的双伺服电机,根据电机特性将双伺服电机分为高扭矩电机和低扭矩电机,高扭矩电机用于在高速行驶和转向过程中提供较大扭矩输出,低扭矩电机则用于在低速行驶和精确控制转向时提供稳定扭矩输出;
27、分配策略:根据车辆的转向模式和扭矩需求,制定力矩分配策略,同时,根据车辆的行驶状态和转向需求,动态调整扭矩分配比例;
28、离合器控制:通过电子离合器控制电机的工作状态,当需要切换电机时,控制器模块发送控制信号给电子离合器,使离合器吸合,从而实现电机的切换。
29、作为本发明的一种优选技术方案,所述s6具体包括以下操作:
30、电机驱动:驱动电路根据控制器模块的指令输出电流和电压,驱动电机转动,电机的转速和扭矩根据控制信号进行调整,确保转向机构能够按照预定轨迹进行转向;
31、转向机构:电机通过驱动转向节,带动转向拉杆和转向轮实现转向动作,在转向过程中,根据车辆的行驶状态和转向需求,调整转向机构的角度和位置。
32、作为本发明的一种优选技术方案,所述s7步骤中通过以下方式进行反馈调整:
33、传感器反馈:传感器模块实时监测车辆的转向状态获取转向信息,转向信息反馈给控制器模块,控制器模块根据反馈信号调整控制参数;
34、控制算法调整:根据车辆的实际行驶情况和反馈信号,对控制算法进行调。
35、作为本发明的一种优选技术方案,保持当前状态:持续监测车辆周围环境和障碍物,保持车辆稳定行驶,避免因变道而产生危险;采取安全措施:根据车辆行驶状态和障碍物情况,采取适当的制动措施、警示提醒以及避让策略。
36、本发明还提供了一种自动驾驶转向系统双伺服电机闭环控制系统,用于实现上述的一种自动驾驶转向系统双伺服电机闭环控制方法,包括硬件架构和软件算法,硬件架构包括双伺服电机、控制器模块、传感器模块、电源模块、通信模块、电子离合器、电子刹车、机械结构;软件算法采用pid控制算法,根据传感器反馈的信息和车辆的行驶状态,实现对双伺服电机的闭环控制。
37、本发明具有以下有益效果:
38、精确控制:通过pid控制算法,根据车辆行驶状态、转向角度以及障碍物距离等信息,精确计算双伺服电机的目标输出力矩,确保转向的精准性,
39、安全可靠:利用深度学习算法进行障碍物检测与可变道评估,能够准确判断车辆是否可以安全变道,避免因变道引发危险,同时,传感器模块实时监测车辆转向状态,通过反馈调整实现闭环控制,提高了系统的可靠性。
40、适应不同行驶状态:根据双伺服电机特性,将电机分为高扭矩电机和低扭矩电机,分别用于高速行驶和低速行驶时的转向控制,满足车辆在不同行驶状态下的需求。
41、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种自动驾驶转向系统双伺服电机闭环控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种自动驾驶转向系统双伺服电机闭环控制方法,其特征在于,所述s1数据采集步骤中,所述传感器模块包括但不限于角度传感器、扭矩传感器、车速传感器、摄像头和电子雷达,所述s2中通过传感器模块获取车辆的数据之后,采用多传感器融合技术,将不同类型传感器获取的信息进行整合,然后进行障碍物检测。
3.根据权利要求2所述的一种自动驾驶转向系统双伺服电机闭环控制方法,其特征在于,所述s2中采用深度学习算法进行可变道评估时具体包括以下步骤:
4.根据权利要求1所述的一种自动驾驶转向系统双伺服电机闭环控制方法,其特征在于,所述计算目标力矩的pid控制算法包括以下步骤:
5.根据权利要求1所述的一种自动驾驶转向系统双伺服电机闭环控制方法,其特征在于,所述s5包括以下步骤:
6.根据权利要求1所述的一种自动驾驶转向系统双伺服电机闭环控制方法,其特征在于,所述s6具体包括以下操作:
7.根据权利要求1所述的一种自动驾驶转向系统双伺服电机闭环控制方法,其特征在于,所述s7步骤中通过以下方式进行反馈调整:
8.根据权利要求1所述的一种自动驾驶转向系统双伺服电机闭环控制方法,其特征在于,保持当前状态:持续监测车辆周围环境和障碍物,保持车辆稳定行驶,避免因变道而产生危险;采取安全措施:根据车辆行驶状态和障碍物情况,采取适当的制动措施、警示提醒以及避让策略。
9.一种自动驾驶转向系统双伺服电机闭环控制系统,用于实现上述权利要求1-8任一项所述的一种自动驾驶转向系统双伺服电机闭环控制方法,其特征在于,包括硬件架构和软件算法,硬件架构包括双伺服电机、控制器模块、传感器模块、电源模块、通信模块、电子离合器、电子刹车、机械结构;软件算法采用pid控制算法,根据传感器反馈的信息和车辆的行驶状态,实现对双伺服电机的闭环控制。
技术总结
本发明公开了一种自动驾驶转向系统双伺服电机闭环控制方法及系统,涉及自动驾驶技术领域。该方法通过传感器模块采集车辆信息,利用深度学习算法进行障碍物检测与可变道评估,运用PID控制算法计算目标力矩,实现对双伺服电机的精确控制。通过力矩分配与离合器控制、执行控制以及反馈调整等环节,提高了车辆的安全性和行驶稳定性。本发明具有精确控制、安全可靠、适应不同行驶状态等优点,能够有效提升自动驾驶转向系统的性能。
技术研发人员:贾红军
受保护的技术使用者:新疆维吾尔自治区阿克苏职业技术学院
技术研发日:
技术公布日:2025/3/13
- 还没有人留言评论。精彩留言会获得点赞!