一种水面清扫机器人设备的制作方法
1.本发明属于机器人制造领域,涉及一种水面清扫机器人设备。
背景技术:
2.我国幅员辽阔,河流湖泊众多,小的河道和池塘更是遍布全国。
3.众所周知,伴随着经济的发展,过去的蓝天碧水,现在也都不同程度的受到了污染,给人们的生活和生命造成了危害。因此,各种河流、湖泊和池塘的水质保护就变得尤为重要,而把水面清扫干净是治理水污染的首要和关键环节。
4.目前,现有的水面清扫方法,主要通过人员在水边打捞或者划船在水中打捞,或者是一些简单的设备,人工打捞的方法很容易出现落水等危险的事故;而简单的设备工作效率低,不能自动发现目标,不能有效地清扫水面上大小不同的各种垃圾,浪费了人力物力和能源。
5.一种水面清扫机器人设备可以自动在水面航行,清扫收集水面垃圾,能够快速高效的清理河面垃圾。
技术实现要素:
6.本发明提供一种基于垃圾渗滤液膜深度净化处理工艺,通过多级处理对垃圾渗滤液进行有效的、合理的和低成本的处理工艺。
7.本发明的目的是这样实现的:一种水面清扫机器人设备,其特征在于:包括
8.中枢控制系统,用于接收控制机器人设备中各个单元发出的信号并作出相应的指令;
9.充、放电单元,包括充电系统和放电系统,用于充电系统生成命令并发出充电指令和接收中枢控制系统发出的放电系统信号并发出放电指令;
10.运动单元,用于根据中枢控制系统向运动单元发出的运动指令,运动单元接收指令完成任务;
11.无线通讯模块,接收遥控终端发出的信号,同时向中枢控制系统发出相应的指令,中枢控制系统接收指令完成任务;
12.距离测控系统,接收超声波传感器发出信号,同时向中枢控制系统发出指令完成任务;
13.视觉系统,接收摄像头传出的图像信号,同时向中枢控制系统发出指令完成任务。
14.进一步的,充电系统包括太阳能充电系统和电源充电系统。
15.进一步优化的,太阳能充电系统将接受的太阳能转化成电能储存在锂离子电池中。
16.再进一步的,运动单元通过电调电路连接两个推进装置,两个推进装置根据中枢控制系统发出的指令选择应用一个或两个推进装置。
17.再进一步的,无线通讯模块包括天线模块和sim卡模块,根据不同的遥控终端发出
的信号,选择天线模块或sim卡模块。
18.本发明的技术效果:与现有技术比具有以下特点:
19.1.距离测控系统,接收超声波传感器发出信号,同时向中枢控制系统发出指令完成任务,由于水面进行不规则的波动,船体在水面航行,超声波传感器向中枢控制系统发出相应的指令,使距离测控系统可以在水面波动的情况下精准测控。
20.2.视觉系统,接收摄像头传出的图像信号,同时向中枢控制系统发出指令完成任务,摄像头可以在100m内进行全方位的图像采集。
附图说明
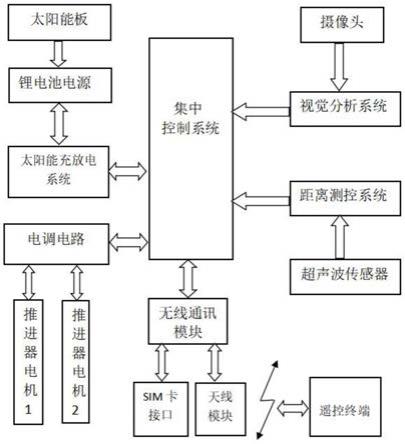
21.图1为本发明的工作流程示意框图。
具体实施方式
22.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分是实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.一种水面清扫机器人设备,包括
24.中枢控制系统,用于接收控制机器人设备中各个单元发出的信号并作出相应的指令;
25.充、放电单元,包括充电系统和放电系统,用于充电系统生成命令并发出充电指令和接收中枢控制系统发出的放电系统信号并发出放电指令;
26.运动单元,用于根据中枢控制系统向运动单元发出的运动指令,运动单元接收指令完成任务;
27.无线通讯模块,接收遥控终端发出的信号,同时向中枢控制系统发出相应的指令,中枢控制系统接收指令完成任务;
28.距离测控系统,接收超声波传感器发出信号,同时向中枢控制系统发出指令完成任务;
29.视觉系统,接收摄像头传出的图像信号,同时向中枢控制系统发出指令完成任务。
30.本发明中,充电系统包括太阳能充电系统和电源充电系统。
31.本发明中,太阳能充电系统将接受的太阳能转化成电能储存在锂离子电池中。
32.本发明中,运动单元通过电调电路连接两个推进装置,两个推进装置根据中枢控制系统发出的指令选择应用一个或两个推进装置。
33.本发明中,无线通讯模块包括天线模块和sim卡模块,根据不同的遥控终端发出的信号,选择天线模块或sim卡模块。
34.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现均应包含在本发明的保护范围内。
技术特征:
1.一种水面清扫机器人设备,其特征在于:包括中枢控制系统,用于接收控制机器人设备中各个单元发出的信号并作出相应的指令;充、放电单元,包括充电系统和放电系统,用于所述的充电系统生成命令并发出充电指令和接收所述的中枢控制系统发出的放电系统信号并发出放电指令;运动单元,用于根据所述的中枢控制系统向运动单元发出的运动指令,所述的运动单元接收指令完成任务;无线通讯模块,接收遥控终端发出的信号,同时向所述的中枢控制系统发出相应的指令,所述的中枢控制系统接收指令完成任务;距离测控系统,接收超声波传感器发出信号,同时向所述的中枢控制系统发出指令完成任务;视觉系统,接收摄像头传出的图像信号,同时向所述的中枢控制系统发出指令完成任务。2.根据权利要求1所述的水面清扫机器人设备,其特征在于:所述的充电系统包括太阳能充电系统和电源充电系统。3.根据权利要求2所述的水面清扫机器人设备,其特征在于:所述的太阳能充电系统将接受的太阳能转化成电能储存在锂离子电池中。4.根据权利要求1所述的水面清扫机器人设备,其特征在于:所述的运动单元通过电调电路连接两个推进装置,所述的两个推进装置根据所述的中枢控制系统发出的指令选择应用一个或两个推进装置。5.根据权利要求1所述的水面清扫机器人设备,其特征在于:所述的无线通讯模块包括天线模块和sim卡模块,根据不同的遥控终端发出的信号,选择所述的天线模块或所述的sim卡模块。
技术总结
一种水面清扫机器人设备,包括中枢控制系统,用于接收控制机器人设备中各个单元发出的信号并作出相应的指令;充、放电单元,包括充电系统和放电系统,用于充电系统生成命令并发出充电指令和接收中枢控制系统发出的放电系统信号并发出放电指令;运动单元,用于根据中枢控制系统向运动单元发出的运动指令,运动单元接收指令完成任务;无线通讯模块,接收遥控终端发出的信号,同时向中枢控制系统发出相应的指令,中枢控制系统接收指令完成任务;距离测控系统,接收超声波传感器发出信号,同时向中枢控制系统发出指令完成任务;视觉系统,接收摄像头传出的图像信号,同时向中枢控制系统发出指令完成任务。出指令完成任务。出指令完成任务。
技术研发人员:李申 何新 王永齐 卢凯 张李兴 路怡涵 杜进
受保护的技术使用者:安徽久吾天虹环保科技有限公司
技术研发日:2021.02.27
技术公布日:2021/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1