一种喷水推进船舶航行控制集成手柄的制作方法
1.本技术涉及一种喷水推进船舶航行控制集成手柄,属于船舶自动化技术领域。
背景技术:
2.典型的喷水推进船舶航行控制系统框图如图1所示,为满足船舶航行操控要求,一般需要在驾驶室布置手柄、控制选择单元、显示单元、报警单元、上位机等多个设备,占用的空间大,在小型船艇、无人艇等应用场合会造成超重、驾驶室布局困难等问题。
3.郑泉等在《柴油机》(第32卷(2010)第2期)提出了船舶主机推进遥控系统用新型复合操纵手柄模块的设计,其优点在于采用数字信号和模拟信号相结合的冗余车令发送,本质上是应用于大型船舶网络平台下的主机推进遥控系统的一个模块,体积较大,且仅针对主机遥控的应用。
4.王恒升等在《传感技术学报》(2004年12月第4期)提出了基于智能传感器的控制手柄设计,重点介绍了对加速度传感器输出信号的硬、软件处理过程,但对手柄功能设计涉及不多。
5.综上所述,在对设备尺寸、重量要求严格的特殊应用场合,缺乏一种小型、功能完善的喷水推进船舶航行控制集成手柄设计方案。
技术实现要素:
6.针对现有技术中的问题,本技术的技术方案是提供了一种喷水推进船舶航行控制集成手柄,其特征在于,包括操纵杆、液晶屏、指示灯、控制按钮、手柄面板、手柄后盖、螺杆、手柄控制板和接插件;所述操纵杆、液晶屏、指示灯、控制按钮均安装于手柄面板上,所述螺杆一端与手柄面板固定,另一端固定连接所述手柄控制板;所述接插件设于手柄后盖底部,手柄后盖与手柄面板通过螺栓紧固连接。
7.其中,所述操纵杆设为二维操纵杆,前后推动操纵杆设为控制喷水推进船舶正航、倒航的推进指令,水平旋转操纵杆设为控制喷水推进船舶航向的操舵指令。
8.其中,所述操纵杆内部设有传感器,传感器采用电位器或霍尔传感器,将操舵、推进指令的机械信号转换为成线性比例的电信号,传感器电连接至手柄控制板。
9.其中,所述指示灯电连接至手柄控制板,用于状态信息的指示。
10.其中,所述控制按钮电连接至手柄控制板,用于进行控制。
11.其中,所述液晶屏设于手柄面板中间区域,电连接至手柄控制板。优选的,所述液晶屏为3.5寸串口屏,显示数据受手柄控制板发送的串口指令控制,显示内容包括四部分,分别为:反馈数据、控制指令数据、报警信息和参数设置。所述反馈数据包括主机转速、舵角反馈值,控制指令数据包括推进指令、操舵指令、当前控制站位等,报警信息包括航行控制系统相关的报警,参数设置为可以对相关参数进行动态设定的参数设置界面。
12.其中,所述手柄控制板上设有继电器、隔离电源、单片机、隔离收发器、adc和eeprom芯片;
13.两路输入电源通过接插件后连接至继电器的输入端,继电器通过触点开合将其中一路送至隔离电源a和隔离电源b;隔离电源a用于给单片机供电,隔离电源b用于给隔离收发器供电;
14.操纵杆内部传感器的输出信号经运算放大器缩放到adc量程范围内后,由adc进行采样,adc基准电压由外部基准电源提供,采样结果送至单片机:
15.控制按钮的信号经光耦隔离后,通过io口连接至单片机,单片机通过读取高低电平获得控制按钮状态;
16.单片机将推进、操舵指令和控制按钮状态通过uart串口发送至液晶屏进行显示,同时通过两路冗余can总线发送给其它设备;一路can总线由单片机自带的can接口完成报文收发,另一路can总线由单片机通过扩展接口连接外部can通信芯片完成报文收发,两路can总线都通过隔离收发器后再连接至外部网络。
17.所述单片机通过can总线获取网络上的反馈数据,根据反馈数据输出信号控制指示灯状态,同时也将反馈数据通过uart串口发送至液晶屏进行显示;
18.在液晶屏的参数设置界面,修改设定参数后,液晶屏通过uart串口将参数值发送至单片机,单片机通过spi接口把参数值发送至eeprom芯片予以保存,每次重新上电后,单片机从eeprom芯片读取所有参数值。
19.本技术的有益效果在于,对喷水推进船舶航行控制手柄进行小型化、集成化设计,通过喷水推进船舶航行控制集成手柄实现控制船舶航行相关的控制、显示、报警、参数设定等功能,相较于传统控制系统方案,大大减少了设备尺寸和重量,为驾驶室布局困难、要求重量轻的小型高速艇、无人艇等应用场合提供了一种有效的技术方案。
附图说明
20.图1为典型喷水推进船舶航行控制系统图;
21.图2为喷水推进船舶航行控制集成手柄结构图,其中,图2-1为结构俯视示意图,图2-2为结构正视示意图;
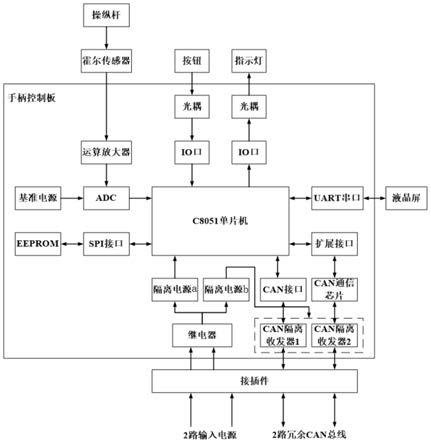
22.图3为手柄控制板原理框图。
具体实施方式
23.为使本技术更明显易懂,兹以优选实施例,并配合附图作详细说明如下。
24.实施例
25.本实施例提供的是喷水推进船舶航行控制集成手柄,通过单个设备实现驾驶室须完成的喷水推进船舶航行控制相关功能,对于提高产品可靠性有重要意义,为尺寸、重要要求严格的特殊应用场合提供了一种可行的技术方案。
26.喷水推进船舶航行控制集成手柄结构图如图2所示,包括操纵杆1、液晶屏2、指示灯3、控制按钮4、手柄面板5、手柄后盖6、螺杆7、手柄控制板8、接插件9。
27.上述操纵杆1、液晶屏2、指示灯3、控制按钮4均安装于手柄面板5上,上述螺杆7一端固定在手柄面板5,上述手柄控制板8安装在螺杆7上,上述接插件9安装于手柄后盖6底部,手柄后盖6与手柄面板5通过螺栓紧固连接。
28.上述操纵杆1为二维操纵杆,前后推动操纵杆1即发出控制喷水推进船舶正航、倒
航的推进指令,水平旋转操纵杆1即发出控制喷水推进船舶航向的操舵指令。操纵杆1内部采用电位器或霍尔传感器,将操舵、推进指令的机械信号转换为成线性比例的电信号,传感器电连接至手柄控制板8。
29.上述指示灯3电连接至手柄控制板8,用于重要信息的状态指示,如:左、右舷接脱排指示,其它站位控制申请,本站控制权在用。
30.上述控制按钮4电连接至手柄控制板8,用于进行相应的控制,如:左、右舷接脱排控制,本站申请控制权,本站应答他站的控制权申请。
31.上述液晶屏2安装在手柄面板5中间区域,电连接至手柄控制板8。液晶屏2为小尺寸(3.5寸)串口屏,显示数据受手柄控制板8发送的串口指令控制,显示内容包括四部分,分别为:反馈数据、控制指令数据、报警信息和参数设置。反馈数据包括主机转速、舵角反馈值等,控制指令数据包括推进指令、操舵指令、当前控制站位等,报警信息包括航行控制系统相关的报警,参数设置界面可以对相关参数进行动态设定,如:喷水推进船舶的零推力位置、最大主机转速、系统背光亮度等,参数将保存在手柄控制板上的eeprom(electrically earasable programmable read-only memory,可擦写可编程只读存储器)芯片内,上电后自动读取。
32.上述手柄控制板8包含单片机、隔离电源模块、光耦、运算放大器、电阻、电容、继电器等器件,其原理框图如图3所示。
33.两路输入电源通过接插件9后连接至继电器的输入端,继电器通过触点开合将其中一路送至隔离电源a和隔离电源b。隔离电源a用于给单片机供电,隔离电源b用于给can(controller aear network,控制器局域网络)隔离收发器供电。
34.对船舶进行航行控制时,操作人员通过推动或旋转操纵杆1发出推进、操舵指令,操纵杆1内部的霍尔传感器跟随转动使得输出信号发生变化,输出信号经运算放大器缩放到adc(analog-to-digital converter,模拟数字转换器)量程范围内后,由adc进行采样,adc基准电压由外部基准电源提供,采样结果送至单片机,
35.控制按钮4的信号经光耦隔离后,通过io口连接至单片机,单片机通过读取高低电平获得控制按钮状态。
36.单片机将上述推进、操舵指令和控制按钮状态通过uart串口发送至液晶屏2进行显示,同时通过两路冗余can总线发送给其它设备。一路can总线由单片机自带的can接口完成报文收发,另一路can总线由单片机通过扩展接口连接外部can通信芯片完成报文收发,两路can总线都通过隔离收发器后再连接至外部网络。
37.单片机通过can总线获取网络上的反馈数据,根据反馈数据输出信号控制指示灯3状态,同时也将反馈数据通过uart(universal asynchronous receiver/transmitter,通用异步收发器)串口发送至液晶屏2进行显示。
38.在液晶屏2的参数设置界面,修改设定参数后,液晶屏2通过uart串口将参数值发送至单片机,单片机通过spi(serial peripheral interface,串行外设接口)接口把参数值发送至eeprom芯片予以保存,每次重新上电后,单片机从eeprom读取所有参数值。
39.喷水推进船舶航行控制集成手柄实现的功能包括但不局限于:
40.1)可作为一个独立控制站布置在驾驶室,替代上位机实现喷水推进船舶航行相关的控制、显示、报警、参数设定等功能;
41.2)多个航行控制集成手柄可以形成多控制站架构,实现包含主驾、副驾、备用控制的多站位控制系统;
42.3)通过两路冗余can总线与其他设备进行数据交互,相关数据可在液晶屏上进行显示;一路can总线出现故障时,手柄自动切换到另外一路can总线工作;
43.4)可在液晶屏界面上进行动态参数设定,参数将保存在手柄控制板上的eeprom内,上电后自动读取;
44.5)对外的电源、通信接口都进行了隔离,保证手柄可靠工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1