一种实现水下无人航行器快速捕捉牵引的装置的制作方法
1.本发明涉及水下无人装备技术领域,具体涉及一种实现水下无人航行器快速捕捉牵引的装置。
背景技术:
2.目前,水下无人航行器(uuv)在军用和民用市场应用前景广阔,呈现出井喷态势。如何更好地发挥uuv的最大效能,解决使用过程中用户的痛点是关键。uuv在回收过程中,如何安全可靠地牵引至回收码头,目前还需要依靠潜水员下水进行捕捉,存在较大人员安全隐患。为解决该难题,经过对原理推敲及方案研讨,同步设计加工了两套捕捉装置并结合uuv在试验现场进行使用,通过对使用过程中存在的问题改进优化,彻底解决了对uuv的拖曳环快速捕捉并实现牵引这一关键技术。该装置是一套精密机械装置,具有结构形式简单、巧妙、成本低廉等优势,利于该技术工程化应用。
技术实现要素:
3.有鉴于此,本发明提供了一种实现水下无人航行器快速捕捉牵引的装置,无需人员下水,能够安全可靠实现uuv捕捉及牵引。
4.本发明采用的技术方案如下:
5.一种实现水下无人航行器快速捕捉牵引的装置,包括撑杆、接头、u型杆、引导杆及牵引绳;
6.所述撑杆通过接头与u型杆封闭端固定连接,所述引导杆两端活动连接在u型钩开放端,将u型杆封闭;所述牵引绳固定在引导杆一端;
7.通过撑杆的往复运动,引导杆两端与u型杆依次完成脱开、连接,引导牵引绳对拖曳环的环绕。
8.进一步地,所述u型杆开放端一端固定有导向座,另一端固定定位座;所述导向座为弯钩,向u型杆内部弯折;所述定位座为y型杆。
9.进一步地,所述引导杆包括夹板ⅰ、夹板ⅱ及连接件;
10.所述夹板ⅰ与夹板ⅱ平行设置,并通过连接件固定连接。
11.进一步地,所述撑杆为空心管,直径30mm-40mm,杆长不超过3000mm。
12.进一步地,所述牵引绳采用φ8-10mm的高强度凯夫拉绳索。
13.有益效果:
14.1、本发明通过撑杆的往复运动,引导杆两端与u型钩依次完成脱开、连接,引导牵引绳对拖曳环的环绕,对比已有技术,能够可靠、快速地实现uuv捕捉及牵引,具备安全、快速和便捷的效果。
15.2、本发明引导杆由两个夹板构成,两个夹板之间有较大的空间,便于与导向座和定位座挂接配合。
16.3、本发明的撑杆考虑了人机工程和轻量化设计,采用空心管,直径30mm-40mm,杆
长不超过3000mm,满足操作者使用方便的需求。
附图说明
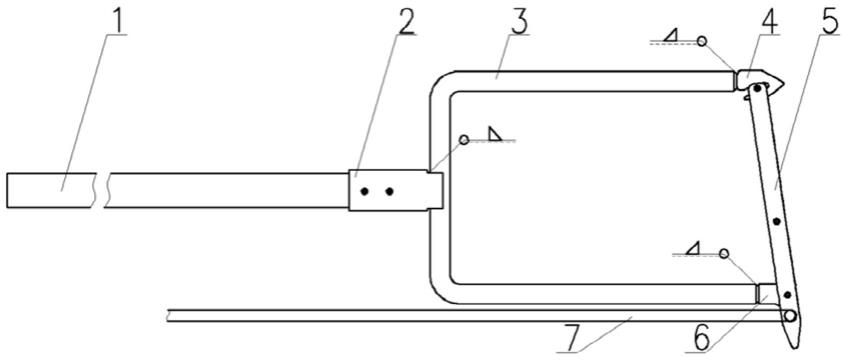
17.图1为本发明整体结构示意图。
18.图2为本发明使用过程中导入拖曳环的示意图。
19.图3为本发明使用过程中退出拖曳环的示意图。
20.图4为本发明的引导杆结构示意图。
21.其中,1-撑杆、2-接头、3-u型杆、4-导向座、5-引导杆、6-定位座、7-牵引绳、8-夹板ⅰ、9-夹板ⅱ、10-垫柱、11-螺钉。
具体实施方式
22.下面结合附图并举实施例,对本发明进行详细描述。
23.本发明提供了一种实现水下无人航行器快速捕捉牵引的装置,包括撑杆1、接头2、u型杆3、引导杆5、导向座4、定位座6及牵引绳7。
24.撑杆1用于延长捕捉的空间距离,设计该杆的关键因素是要满足操作者使用方便。考虑人机工程和轻量化设计,撑杆1选用低密度、耐腐蚀的材质,复合材料如碳纤维、玻璃纤维,或采用铝合金,撑杆1直径30mm-40mm,便于操作者手握操作。本实施例的撑杆1为铝合金材质的空心管,直径35mm,壁厚为2mm,杆长不超过3000mm。
25.接头2作为转接件,便于加工成型。一端与撑杆1通过螺钉连接,另一端与u型杆3焊接。
26.u型杆3用于捕捉uuv的拖曳环。u型杆3的空间尺寸需根据uuv的拖曳环的大小来定制,在满足使用前提下尽量减小尺寸,达到减轻重量的目的。同时该零件需要与引导杆5结合设计。
27.导向座4用于规划引导杆5运动路径。导向座4焊接在u型杆3一端,与引导杆5挂接,在捕捉拖曳环前,要满足引导杆5能轻松脱离导向座4的开槽,在远离拖曳环过程中,引导杆5能精准导引到导向座4的开槽中。本实施例中,导向座4为弯钩,向u型杆3内部弯折。
28.引导杆5用于引导牵引绳7的运动轨迹。引导杆5为一个活动部件,拖曳绳固定在其一端的孔上,在捕捉uuv拖曳环过程中,u型杆3在拖曳环上前后运动,通过导向座4的导引实现牵引绳7对拖曳环的环绕,最终引导杆5随导向座4一起将牵引绳7拉到回收者手中。
29.定位座6与引导杆5挂接,并用于对引导杆5进行支撑。定位座6作为一个支点焊接在u型杆3的另一端,对引导杆5进行定位支撑。本实施例中,定位座6为y型杆,开口超向u型杆3外部。
30.牵引绳7用于环绕uuv的拖曳环,实现拖曳。牵引绳7的规格需根据uuv拖曳过程中的阻力来进行选择,一般选择φ8-10mm高强度凯夫拉绳索。
31.如图4所示,引导杆5包括夹板ⅰ8、夹板ⅱ9及连接件;连接件为垫柱10和螺钉11。夹板ⅰ8与夹板ⅱ9平行设置,并通过垫柱10和螺钉11固定连接。夹板ⅰ8与夹板ⅱ9之间的空间用于与导向座4的沟槽、定位座6的y型开口挂接配合。
32.如图1所示,上述部件间连接关系为:接头2与撑杆1通过螺钉连接;接头2与u型杆3封闭端焊接连接;u型杆3开放端一端与导向座4焊接,另一端与定位座6焊接;导向座4与引
导杆5通过导向槽仅有相对定位,不固连;引导杆5同时挂接在定位座6上;定位座6与牵引绳7绑定连接。
33.具体工作过程如下:如图2和图3所示,图2为导入拖曳环,以u型杆3一侧为右,此时撑杆1向右移动,在水的阻力作用下,引导杆5一端沿导向座4沟槽与其进行分离,实现牵引绳7穿入拖曳环,引导杆5另一端挂接在定位座6的y型开口内;图3为退出拖曳环,此时撑杆1向左移动,引导杆5挂接在导向座4的沟槽内,与其进行定位,同时引导杆5与定位座6进行分离,实现牵引绳7绕过拖曳环回到操作者手中,实现对uuv的拖曳。
34.在捕捉过程中,通过引导杆5在u型杆3上的来回摆动,实现“穿针引线”的功能,最终将牵引绳7套在uuv的拖曳环上,并将牵引绳7的绳头导引到回收者手中。该装置需要考虑人机工程和轻量化设计两个主要因素,尤其要对装置的最前端的部组件进行轻量化设计,减少使用过程中最前端产生的弯矩,最终才能发挥该装置的最大效能,实现轻巧好用。结合撑杆1的长度,经反复优化验证,最前端部组件重量不能超过2kg。
35.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种实现水下无人航行器快速捕捉牵引的装置,其特征在于,包括撑杆、接头、u型杆、引导杆及牵引绳;所述撑杆通过接头与u型杆封闭端固定连接,所述引导杆两端活动连接在u型钩开放端,将u型杆封闭;所述牵引绳固定在引导杆一端;通过撑杆的往复运动,引导杆两端与u型杆依次完成脱开、连接,引导牵引绳对拖曳环的环绕。2.如权利要求1所述的实现水下无人航行器快速捕捉牵引的装置,其特征在于,所述u型杆开放端一端固定有导向座,另一端固定定位座;所述导向座为弯钩,向u型杆内部弯折;所述定位座为y型杆。3.如权利要求2所述的实现水下无人航行器快速捕捉牵引的装置,其特征在于,所述引导杆包括夹板ⅰ、夹板ⅱ及连接件;所述夹板ⅰ与夹板ⅱ平行设置,并通过连接件固定连接。4.如权利要求1-3任意一项所述的实现水下无人航行器快速捕捉牵引的装置,其特征在于,所述撑杆为空心管,直径30mm-40mm,杆长不超过3000mm。5.如权利要求4所述的实现水下无人航行器快速捕捉牵引的装置,其特征在于,所述牵引绳采用φ8-10mm的高强度凯夫拉绳索。
技术总结
本发明公开了一种实现水下无人航行器快速捕捉牵引的装置,包括撑杆、接头、U型杆、引导杆及牵引绳;撑杆通过接头与U型杆封闭端固定连接,所述引导杆两端活动连接在U型钩开放端,将U型杆封闭;所述牵引绳固定在引导杆一端;通过撑杆的往复运动,引导杆两端与U型杆依次完成脱开、连接,引导牵引绳对拖曳环的环绕。本发明无需人员下水,能够安全可靠实现UUV捕捉及牵引。牵引。牵引。
技术研发人员:熊传志 江国金 方勇 胡必文
受保护的技术使用者:宜昌测试技术研究所
技术研发日:2021.12.27
技术公布日:2022/5/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1