一种用于水下机器人的搭载投送装置及控制方法
本发明涉及水下机器人领域,具体地说是一种用于水下机器人的搭载投送装置及控制方法。
背景技术:
1、为实现对某个目标海域的长期观测,现有技术中一般使用水下滑翔机、剖面漂流浮标、漂流浮标等设备,但是由于漂流浮标及剖面漂流浮标属于无动力设备,无法自主航行至目标观测点,而水下滑翔机通过调节自身浮力,可沿锯齿状轨迹向前滑行,但其抗流能力弱,航行速度较慢,无法快速准确到达观测点,因此目前对以上水下观测设备大多采用科考船布放的方式完成投放,但是科考船成本较高,且对一些危险海域或敏感海域的观测,科考船无法完成布放任务。如果能够利用装有搭载投送装置的水下机器人来完成上述观测载荷的投送任务,将具备隐蔽性强、布放点精准、可快速部署等优点,但现有技术中的水下机器人搭载投送装置可靠性差,且无法完成水下机器人与被搭载装置之间的通信,因此被投送装置在下水前编制的使命任务无法在投送过程中进行在线更改,并且投送后也无法判断是否成功完成投送。
技术实现思路
1、本发明的目的在于提供一种用于水下机器人的搭载投送装置及控制方法,其利用水下机器人携带被投送装置移动至目标海域,并利用控制电路板的光通信方式实现水下机器人与被投送装置之间的信息传输,进而对被投送装置任务参数进行在线更改,然后再利用控制电路板控制爆炸螺栓起爆实现附体抱箍分离完成投放,并利用控制电路板的光通信方式判断被投送装置是否成功分离。
2、本发明的目的是通过以下技术方案来实现的:
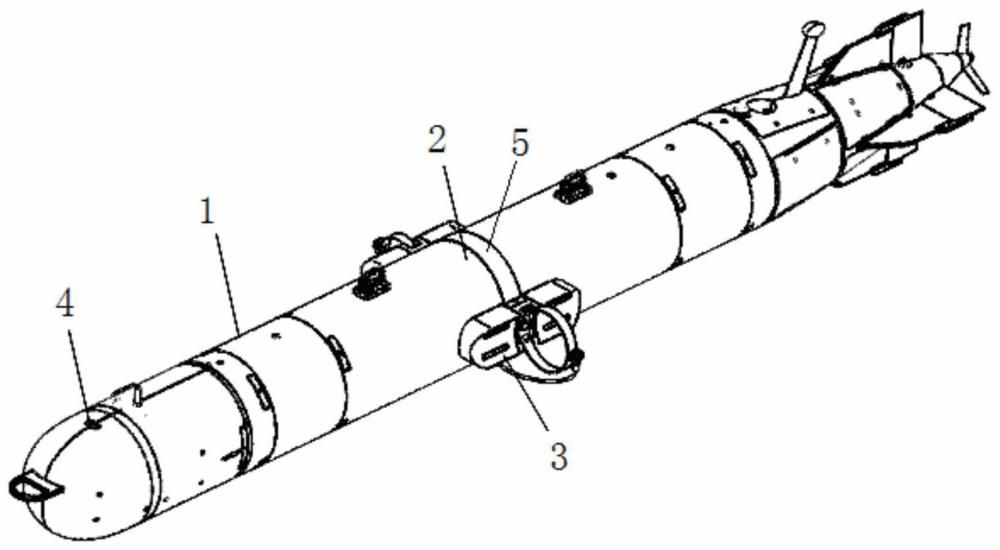
3、一种用于水下机器人的搭载投送装置,包括主控计算机、控制电路板、投送载体和压力开关,其中主控计算机和控制电路板均设于水下机器人内部,水下机器人上设有压力开关,所述投送载体包括安装块、附体抱箍和爆炸螺栓,其中安装块设于水下机器人上,附体抱箍一端与所述安装块连接、另一端通过爆炸螺栓连接,所述爆炸螺栓与所述控制电路板连接,另外所述主控计算机和压力开关均与所述控制电路板连接。
4、所述控制电路板包括微处理器、can通信电路、压力开关检测电路、恒流源电路和第一光电转换模块,其中微处理器上设有多个端口,第一光电转换模块包括信号调制电路、光驱动电路、光电转换电路和滤波放大电路,主控计算机、can通信电路以及微处理器上的第一端口依次连接,光电转换电路、滤波放大电路以及微处理器上的第二端口依次连接,压力开关、压力开关检测电路以及微处理器上的第三端口依次连接,安装块上设有第一led阵列灯,且微处理器上的第四端口、信号调制电路、第一led阵列灯依次连接,微处理器上的第五端口、恒流源电路、爆炸螺栓依次连接;被投送装置上设有第二光电转换模块和第二led阵列灯,且所述第二光电转换模块和第一光电转换模块结构相同,所述第一led阵列灯对准第二光电转换模块的光电转换电路位置,所述第二led阵列灯对准第一光电转换模块的光电转换电路位置。
5、所述安装块对应第一led阵列灯和第二led阵列灯的位置均设有透光孔。
6、所述安装块通过载体抱箍固定于水下机器人上。
7、所述爆炸螺栓通过水密电缆与设于水下机器人内的控制电路板连接。
8、一种根据所述的用于水下机器人的搭载投送装置的控制方法,包括如下步骤:
9、步骤一:水下机器人搭载被投送装置布放下水后,通过压力开关的压力检测判断是否到达指定水深,如果未到达,水下机器人继续移动,如果达到,则开始步骤二的投送;
10、步骤二:水下机器人下潜到指定水深后,控制电路板解析主控计算机发送的指令并判断是否开始投送,如果不是投送指令则重复步骤二,如果是投送指令则转入步骤三;
11、步骤三:确认主控计算机发出投送指令后,控制电路板继续判断是否需要对被投送装置相关参数进行更改,如果是则转入步骤四,如果否则转入步骤五;
12、步骤四:控制电路板接收到主控计算机发送的更改被投送装置参数的指令内容后,将指令内容通过第一光电转换模块发送给被投送装置,被投送装置接收指令并完成更改后通过第二光电转换模块反馈给控制电路板,所述控制电路板如果接收到被投送装置的反馈,则转入步骤五,如果没有收到反馈,则重复本步骤再次传送指令内容;
13、步骤五:控制电路板发送起爆信号使爆炸螺栓启动爆炸;
14、步骤六:控制电路板通过第一光电转换模块向被投送装置发送查询指令,如果被投送装置有信号反馈,重复步骤五,如果无信号反馈,投送流程结束。
15、本发明的优点与积极效果为:
16、1、本发明利用水下机器人携带被投送装置移动至目标海域,从而能够完成精准快速投放。
17、2、本发明利用控制电路板的光通信方式实现水下机器人与被投送装置的信息传输,进而实现对被投送装置任务参数的在线更改,并且在完成投送后还可以利用控制电路板的光通信方式确认被投送装置是否成功分离,保证投送成功率。
18、3、本发明利用控制电路板控制爆炸螺栓起爆实现附体抱箍分离,从而完成被投送装置的投放作业,结构简单可靠。
技术特征:
1.一种用于水下机器人的搭载投送装置,其特征在于:包括主控计算机(1)、控制电路板(2)、投送载体(3)和压力开关(4),其中主控计算机(1)和控制电路板(2)均设于水下机器人内部,水下机器人上设有压力开关(4),所述投送载体(3)包括安装块(7)、附体抱箍(6)和爆炸螺栓(11),其中安装块(7)设于水下机器人上,附体抱箍(6)一端与所述安装块(7)连接、另一端通过爆炸螺栓(11)连接,所述爆炸螺栓(11)与所述控制电路板(2)连接,另外所述主控计算机(1)和压力开关(4)均与所述控制电路板(2)连接。
2.根据权利要求1所述的用于水下机器人的搭载投送装置,其特征在于:所述控制电路板(2)包括微处理器、can通信电路、压力开关检测电路、恒流源电路和第一光电转换模块,其中微处理器上设有多个端口,第一光电转换模块包括信号调制电路、光驱动电路、光电转换电路和滤波放大电路,主控计算机(1)、can通信电路以及微处理器上的第一端口依次连接,光电转换电路、滤波放大电路以及微处理器上的第二端口依次连接,压力开关(4)、压力开关检测电路以及微处理器上的第三端口依次连接,安装块(7)上设有第一led阵列灯(9),且微处理器上的第四端口、信号调制电路、第一led阵列灯(9)依次连接,微处理器上的第五端口、恒流源电路、爆炸螺栓(11)依次连接;被投送装置上设有第二光电转换模块和第二led阵列灯,且所述第二光电转换模块和第一光电转换模块结构相同,所述第一led阵列灯(9)对准第二光电转换模块的光电转换电路位置,所述第二led阵列灯对准第一光电转换模块的光电转换电路位置。
3.根据权利要求2所述的用于水下机器人的搭载投送装置,其特征在于:所述安装块(7)对应第一led阵列灯(9)和第二led阵列灯的位置均设有透光孔(8)。
4.根据权利要求1所述的用于水下机器人的搭载投送装置,其特征在于:所述安装块(7)通过载体抱箍(5)固定于水下机器人上。
5.根据权利要求1所述的用于水下机器人的搭载投送装置,其特征在于:所述爆炸螺栓(11)通过水密电缆(10)与设于水下机器人内的控制电路板(2)连接。
6.一种根据权利要求2所述的用于水下机器人的搭载投送装置的控制方法,其特征在于:包括如下步骤:
技术总结
本发明涉及一种用于水下机器人的搭载投送装置及控制方法,其中主控计算机和控制电路板均设于水下机器人内部,水下机器人上设有压力开关,投送载体包括安装块、附体抱箍和爆炸螺栓,其中安装块设于水下机器人上,附体抱箍一端与安装块连接、另一端通过爆炸螺栓连接,爆炸螺栓与控制电路板连接,另外主控计算机和压力开关均与控制电路板连接。本发明利用水下机器人携带被投送装置移动至目标海域,并利用控制电路板的光通信方式实现水下机器人与被投送装置之间的信息传输,进而对被投送装置任务参数进行在线更改,然后再利用控制电路板控制爆炸螺栓起爆实现附体抱箍分离完成投放,并利用控制电路板的光通信方式判断被投送装置是否成功分离。
技术研发人员:李吉旭,刘铁军,闫兴亚,唐元贵,王福利,祁胜,姜志斌
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!