一种可越障碍物的水下机器人
本发明涉及机器人,尤其涉及一种可越障碍物的水下机器人。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,只有借助更加强大的水下设备人类才能够探测几千米深的水域,去进一步的发掘海洋深处的奥秘,所以水下机器人已成为开发海洋的重要工具,通过机器人来无人的进行探测,方便进行处理。
2、现在的水下机器人结构过于简单,在水域底部进行工作时,会通常接近水底的淤泥和各种障碍物,进而容易导致机器人在进行工作时十分容易与障碍物进行碰撞,同时也缺少能够有效进行遮挡的装置,容易在其移动时出现杂物附着和污泥吸附在履带上影响正常的适用。
3、并且在水底行进时,传统的设备通常都是通过叶轮带动,进而其不能够很好的精确调整,并且在陷入淤泥或被困住时,通常都缺少能够有效脱离和移动的方法。
技术实现思路
1、本发明提出的一种可越障碍物的水下机器人,解决了传统设备缺少遮挡,难以清理附作物、缺少脱离越过障碍结构的问题。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种可越障碍物的水下机器人,包括箱体,所述箱体的底部安装有工作模块,箱体的两侧均设置有封闭盒,封闭盒远离箱体的一侧设置有边缘底部设置有转动齿带,封闭盒侧壁靠近转动齿带的内部两端均安装有调整组件,调整组件与转动齿带相互转动连接,转动齿带的顶部中心处贴合设置有清理辊,转动齿带的内部靠近清理辊的底部两端均转动连接有转动齿辊,工作模块的内部安装有传动组件,传动组件分别与清理辊和转动齿辊进行转动连接,箱体的底部拐角处均设置有调节框,箱体的底部呈环绕设置有多个阻挡条。
4、优选的,所述调整组件包括伸缩杆、转动齿轮和驱动柱,伸缩杆的内部伸出端与转动齿轮的中心处转动连接,伸缩杆远离转动齿轮的一端外部与驱动柱相互固定连接,转动齿轮的外壁呈环绕设置有齿牙。
5、优选的,所述伸缩杆的一端通过驱动柱与箱体的内部相互转动连接,箱体的内部设置有与驱动柱相互固定连接的步进电机,转动齿轮的外壁与转动齿带相互啮合连接,转动齿带的内部设置有与转动齿轮相互对应的齿牙。
6、优选的,所述清理辊的外壁呈环绕设置有毛刷,转动齿辊的外壁通过齿牙与转动齿带的内壁相互啮合,清理辊通过驱动杆贯穿工作模块的内部与箱体相互连接,转动齿辊的内部通过转动杆贯穿工作模块的内部与箱体转动连接。
7、优选的,所述传动组件包括传动齿轮、主动轮和从动轮,主动轮的两侧边底部均与传动齿轮相互啮合,传动齿轮远离主动轮的一侧与从动轮相互啮合连接,且主动轮与从动轮的直径均大于传动齿轮。
8、优选的,所述传动齿轮通过轴承与箱体的侧壁相互转动连接,主动轮与驱动杆的外壁相互固定连接,且驱动杆贯穿箱体的内部与驱动电机相互连接。
9、优选的,所述调节框的内部设置有驱动轮机,箱体的拐角处底部转动连接有多个转动环,且转动环的一端通过转动轴与调节框的顶部相互转动连接,转动环的内部设置有转动电机与箱体相互转动连接,且转动轴的内部底端设置有驱动电机,驱动电机与调节框相互连接。
10、优选的,所述阻挡条的底部呈弧形,且阻挡条的两端处突出箱体的两侧与调节框相互对应,阻挡条的两端顶部向箱体进行完全且多个阻挡条的两端与均通过焊接与阻挡条进行固定。
11、优选的,所述工作模块的两端底部靠近阻挡条的位置均设置有底座,底座分别与多个阻挡条进行固定连接,且阻挡条的底端中心处与工作模块相互固定连接。
12、与现有技术相比,本发明的有益效果是:
13、1、在进行使用时,能够方便的将设备放置到水中,进而能够通过启动驱动轮机来带动水流移动,从而使得装置能够方便的在水中移动,同时能够方便的通过转动轴来带动调节框旋转,进而调节驱动轮机转动带动的水流方向,同时在使用时通过多个阻挡条的作用,能够很好的阻止较大的杂物靠近底端的调节框,进而方面装置运行,同时在使用时,还能够反向转动驱动轮机,进的使得水流向远离箱体的位置移动,进而能够方便的使得阻挡条外部的杂物能够方便的反向移动,避免堵塞,同时在使用时还能够方便的启动传动组件,进而使得电机带动主动轮旋转,使得主动轮的底部两侧均通过传动齿轮带动从动轮旋转,进而使得转动杆带动转动齿轮旋转,使得转动齿带旋转,同时通过驱动杆带动了清理辊旋转,能够有效的对转动过的转动齿带外壁进行清理,避免其附着杂物,方便进行使用,能够有效的阻挡杂物的靠近,避免中受到的干扰。
14、2、同时本装置在水下使用时,遇到大型的障碍物,可以启动调整组件,进而使得驱动柱带动了伸缩杆旋转,伸缩杆带动了转动齿轮,进而使得转动齿带被带动向底部移动,能够使其与水体底部相互接触,进而对装置实现支撑,同时启动传动组件,进而带动了转动齿辊旋转,就能够方便的通过转动齿带的旋转带动封闭盒移动,进而带动箱体移动,进而调整装置在水底部的位置,同时通过箱体两侧转动齿带的差速旋转实现变向和后退等移动,方便的绕过障碍物,而且还能够启动转动环,进而转动环旋转带动转动轴,进而使得调节框被带动到箱体的两侧,进而能够再次启动驱动轮机,进而能够带动装置向顶部或底部进行上下移动,来绕过水底的障碍物,使用十分的便捷。
技术特征:
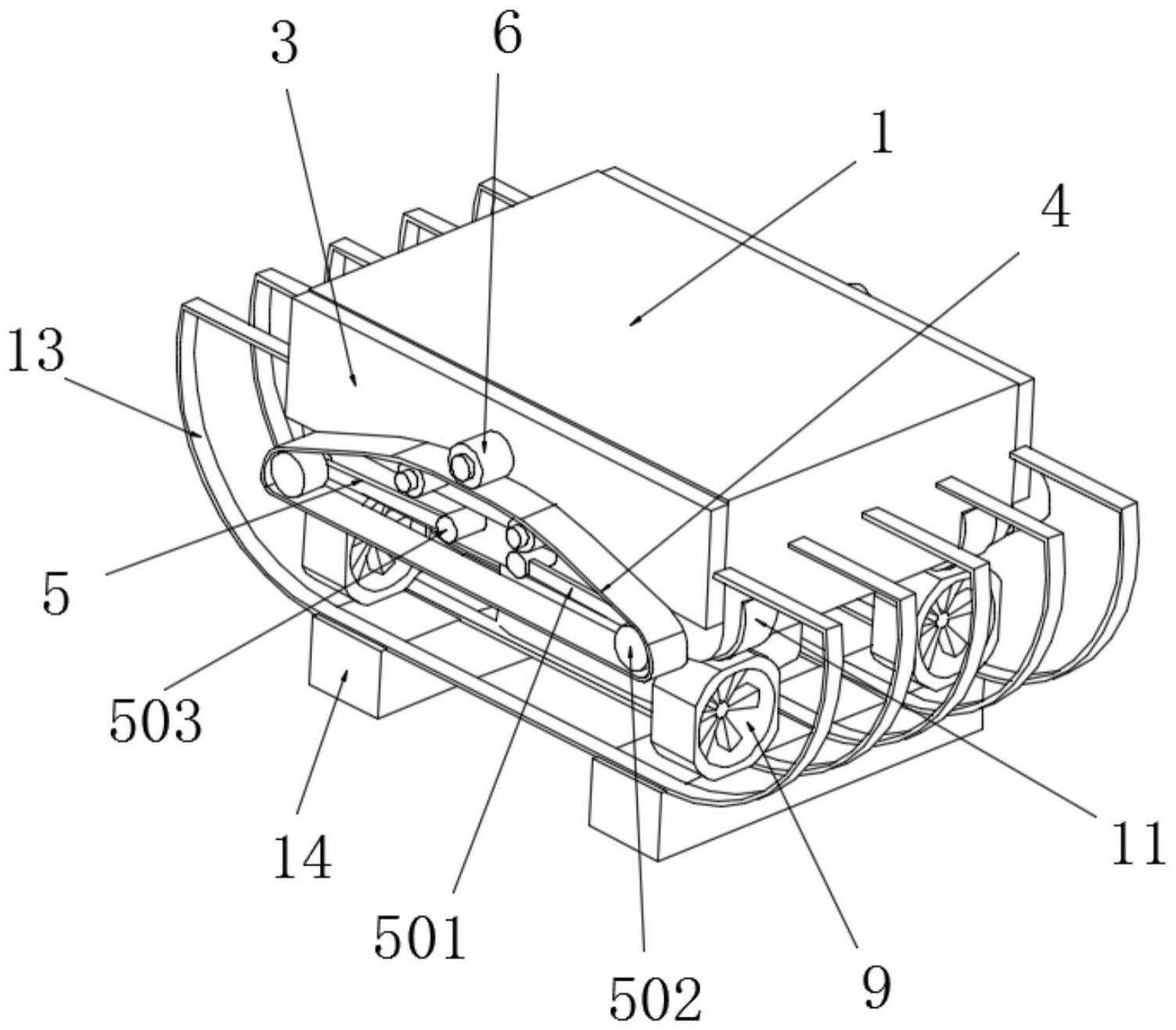
1.一种可越障碍物的水下机器人,包括箱体(1),其特征在于,所述箱体(1)的底部安装有工作模块(2),箱体(1)的两侧均设置有封闭盒(3),封闭盒(3)远离箱体(1)的一侧设置有边缘底部设置有转动齿带(4),封闭盒(3)侧壁靠近转动齿带(4)的内部两端均安装有调整组件(5),调整组件(5)与转动齿带(4)相互转动连接,转动齿带(4)的顶部中心处贴合设置有清理辊(6),转动齿带(4)的内部靠近清理辊(6)的底部两端均转动连接有转动齿辊(7),工作模块(2)的内部安装有传动组件(8),传动组件(8)分别与清理辊(6)和转动齿辊(7)进行转动连接,箱体(1)的底部拐角处均设置有调节框(9),箱体(1)的底部呈环绕设置有多个阻挡条(13)。
2.根据权利要求1所述的一种可越障碍物的水下机器人,其特征在于,所述调整组件(5)包括伸缩杆(501)、转动齿轮(502)和驱动柱(503),伸缩杆(501)的内部伸出端与转动齿轮(502)的中心处转动连接,伸缩杆(501)远离转动齿轮(502)的一端外部与驱动柱(503)相互固定连接,转动齿轮(502)的外壁呈环绕设置有齿牙。
3.根据权利要求2所述的一种可越障碍物的水下机器人,其特征在于,所述伸缩杆(501)的一端通过驱动柱(503)与箱体(1)的内部相互转动连接,箱体(1)的内部设置有与驱动柱(503)相互固定连接的步进电机,转动齿轮(502)的外壁与转动齿带(4)相互啮合连接,转动齿带(4)的内部设置有与转动齿轮(502)相互对应的齿牙。
4.根据权利要求1所述的一种可越障碍物的水下机器人,其特征在于,所述清理辊(6)的外壁呈环绕设置有毛刷,转动齿辊(7)的外壁通过齿牙与转动齿带(4)的内壁相互啮合,清理辊(6)通过驱动杆(601)贯穿工作模块(2)的内部与箱体(1)相互连接,转动齿辊(7)的内部通过转动杆(701)贯穿工作模块(2)的内部与箱体(1)转动连接。
5.根据权利要求1所述的一种可越障碍物的水下机器人,其特征在于,所述传动组件(8)包括传动齿轮(801)、主动轮(802)和从动轮(803),主动轮(802)的两侧边底部均与传动齿轮(801)相互啮合,传动齿轮(801)远离主动轮(802)的一侧与从动轮(803)相互啮合连接,且主动轮(802)与从动轮(803)的直径均大于传动齿轮(801)。
6.根据权利要求5所述的一种可越障碍物的水下机器人,其特征在于,所述传动齿轮(801)通过轴承与箱体(1)的侧壁相互转动连接,主动轮(802)与驱动杆(601)的外壁相互固定连接,且驱动杆(601)贯穿箱体(1)的内部与驱动电机相互连接。
7.根据权利要求1所述的一种可越障碍物的水下机器人,其特征在于,所述调节框(9)的内部设置有驱动轮机(10),箱体(1)的拐角处底部转动连接有多个转动环(11),且转动环(11)的一端通过转动轴(12)与调节框(9)的顶部相互转动连接,转动环(11)的内部设置有转动电机与箱体(1)相互转动连接,且转动轴(12)的内部底端设置有驱动电机,驱动电机与调节框(9)相互连接。
8.根据权利要求1所述的一种可越障碍物的水下机器人,其特征在于,所述阻挡条(13)的底部呈弧形,且阻挡条(13)的两端处突出箱体(1)的两侧与调节框(9)相互对应,阻挡条(13)的两端顶部向箱体(1)进行完全且多个阻挡条(13)的两端与均通过焊接与阻挡条(13)进行固定。
9.根据权利要求1所述的一种可越障碍物的水下机器人,其特征在于,所述工作模块(2)的两端底部靠近阻挡条(13)的位置均设置有底座(14),底座(14)分别与多个阻挡条(13)进行固定连接,且阻挡条(13)的底端中心处与工作模块(2)相互固定连接。
技术总结
本发明属于机器人技术领域,尤其是一种可越障碍物的水下机器人,针对现有的传统设备缺少遮挡,难以清理附作物、缺少脱离越过障碍结构的问题,现提出如下方案,包括箱体,所述箱体的底部安装有工作模块,箱体的两侧均设置有封闭盒,封闭盒远离箱体的一侧设置有边缘底部设置有转动齿带,封闭盒侧壁靠近转动齿带的内部两端均安装有调整组件,调整组件与转动齿带相互转动连接,转动齿带的顶部中心处贴合设置有清理辊,转动齿带的内部靠近清理辊的底部两端均转动连接有转动齿辊,工作模块的内部安装有传动组件,传动组件分别与清理辊和转动齿辊进行转动连接。本发明具有能够对杂物进行遮挡和清理、方便进行越过障碍物的优点。
技术研发人员:贾风光,李方翠,庄广兴
受保护的技术使用者:山东交通学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!