一种水下航行器用应急自平衡装置以及水下航行器
本发明属于水下航行器,尤其涉及一种水下航行器用应急自平衡装置以及水下航行器。
背景技术:
1、如今,人们越来越重视海洋开发,水下航行器是海洋开发的主要设备,越来越多的得到各个领域的重视,无论是在民用还是在军用上,都扮演着重要的角色。水下航行器的续航能力强、航程远、机动性好的特点使其非常适合生、化、物等参数的测量工作,使其成为最常用的水下移动观测平台之一。
2、当前国内外海洋探测领域,1500米级深度水下航行器的发展已经相对成熟,但是其探测深度、探测范围不能有效满足科学研究需求。近年来,国内一些科研单位已经开始了大深度水下航行器的研制,例如2020年申请公开的“一种7000米级深渊水下滑翔机”,其申请公布号为cn112124538a,该发明公开了一种7000米级深渊水下滑翔机,包括艉部浸水舱段、浮力调节舱段、姿态调节舱段、天线等,该技术解决了大深度、高密度海洋水文观测需求。但是,目前,上述深渊水下滑翔机采用单一的浮力调节装置作为驱动力,机动性受限,如定深航行、短时较高速巡航作业模式等均无法完成。除此之外,对于一般的水下航行器,在人为误操作导致水下航行器机体进入应急模式即应急重物脱离机体后,水下航行器由于处于较大的正浮力状态,便会浮出水面,由于机体浮力大于重力,水下航行器便无法继续潜深作业,只能待工作人员对其进行“抢救”后才可继续作业,若水下航行器赴较远海域进行作业,显然“抢救”任务将会产生巨大的经济和时间成本。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种解决目前水下航行器浮力控制调节功能单一,无应急调节浮力平衡的功能,运维成本高等问题的水下航行器用应急自平衡装置以及水下航行器。
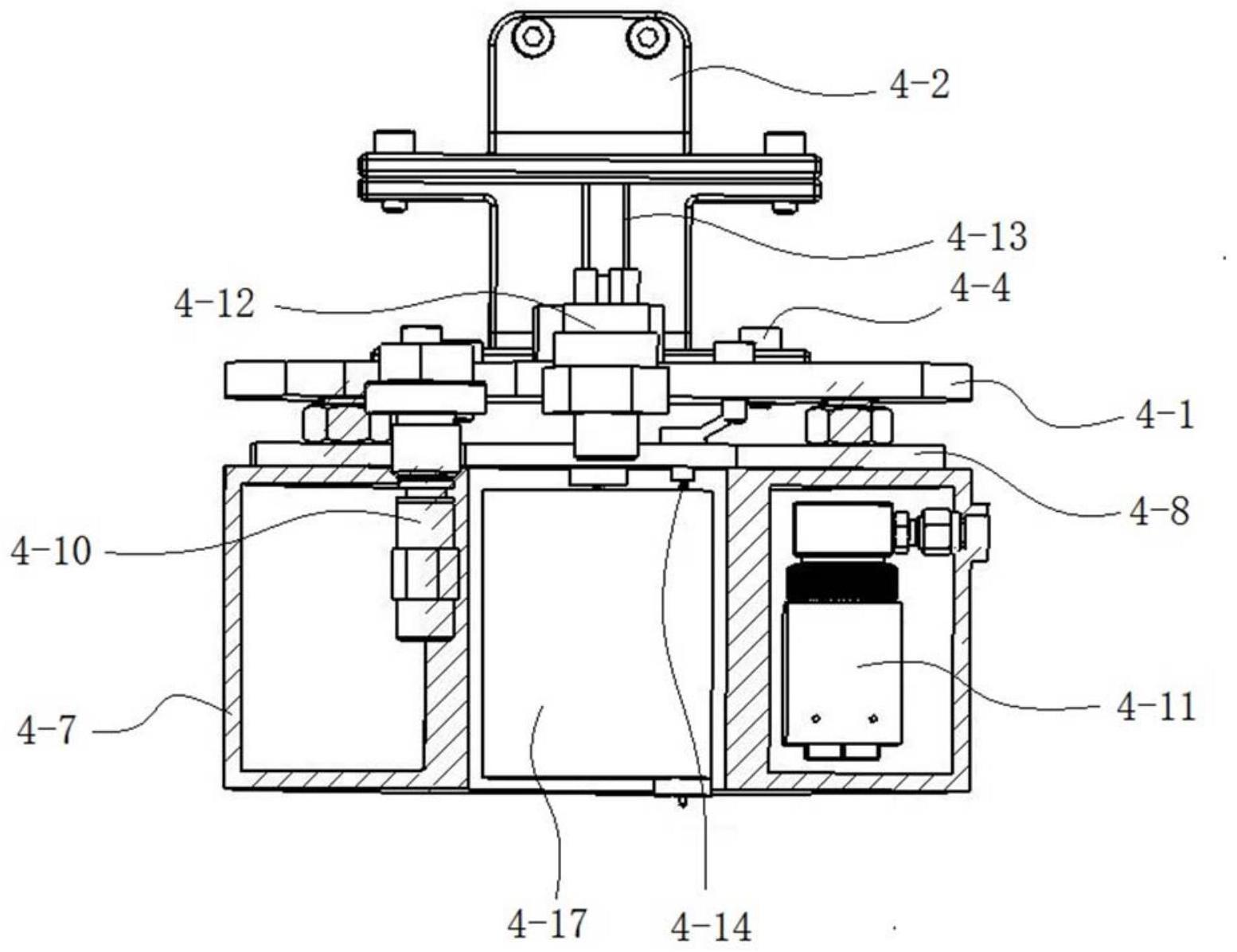
2、本发明是这样实现的,一种水下航行器用应急自平衡装置,其特征在于,包括基架、电极端子、第一牵拉导线、应急浮力调节壳体、电磁阀、第二牵拉导线和配重体;所述电极端子设于所述基架上;所述第一牵拉导线与所述基架上的两电极端子形成通电后令第一牵拉导线熔断的第一电流通路;所述应急浮力调节壳体通过所述第一牵拉导线连接于所述基架,所述应急浮力调节壳体的内部设有浮力调节密封腔;所述电磁阀安装于所述应急浮力调节壳体,所述电磁阀与所述浮力调节密封腔连通,所述电磁阀连接非承载引线;所述第二牵拉导线通过非承载导线与两电极端子形成通电后令第二牵拉导线熔断的第二电流通路;所述配重体通过所述第二牵拉导线连接于所述应急浮力调节壳体。
3、在上述技术方案中,优选的,所述电极端子包括第一阳极端子、第二阳极端子和阴极端子,所述第一阳极端子、第一牵拉导线和阴极端子连接构成所述第一电流通路;所述第二阳极端子、非承载导线、第二牵拉导线和阴极端子连接构成所述第二电流通路。
4、在上述技术方案中,优选的,所述应急浮力调节壳体为圆柱形构造,所述应急浮力调节壳体的内部构成圆环形的所述浮力调节密封腔,圆环形的所述浮力调节密封腔内侧形成下端开口的圆柱形的中心嵌槽,所述配重体是配装于所述中心嵌槽中的圆柱体构造。
5、在上述技术方案中,优选的,所述电磁阀安装于所述浮力调节密封腔中,所述应急浮力调节壳体的侧壁设有与所述电磁阀连通的孔口。
6、在上述技术方案中,优选的,所述应急浮力调节壳体的上部安装水密线缆接头,与所述电磁阀连通的所述非承载引线自所述水密线缆接头引出至所述应急浮力调节壳体外侧。
7、在上述技术方案中,优选的,所述应急浮力调节壳体的上部安装有密封堵头。
8、在上述技术方案中,优选的,所述应急浮力调节壳体安装抽气单向阀,所述抽气单向阀用于浮力调节密封腔形成真空。
9、本发明申请的优点和效果是:
10、1、本申请提出的大深度水下航行器在人为误操作机体进入应急模式后的自平衡装置,当因为人为误操作原因使水下航行器的应急重物脱离机体后,重浮力不平衡导致水下航行器无法作业,本装置可使水下航行器重新恢复平衡及作业能力,同时自平衡装置仍能作为二次应急重物脱离机体,使水下航行器安全到达水面。
11、2、本自平衡装置在设计时,充分考虑了重物净重与进水质量相同,并且所进水的重心与重物重心均在浮力调节密封腔的几何轴线上,这样进入浮力调节密封腔的水便可替代重物,使水下航行器重新恢复到平衡状态。
12、3、本发明的大深度水下航行器的应急自平衡装置有四种工作模式:a、机体首次进入应急模式,配重体脱离机体;b、启动自平衡装置,使进入应急模式的机体重新恢复作业能力;c、机体再次进入应急模式,自平衡装置脱离机体;d、机体首次进入应急模式,重物脱离机体失败,自平衡装置脱离机体;该装置充分保障了水下航行器的安全性,避免由于重物脱离机体失败造成水下航行器无法上浮的问题。
13、本发明的另一目的,提出一种水下航行器,包括依次连接的艏部总成、舯部耐压舱总成和艉部总成,其特征在于,所述艉部总成中安装权利上述的应急自平衡装置。
14、在上述技术方案中,优选的,所述艏部总成安装有艏部浮力补偿模块,所述艉部总成安装有尾部浮力补偿模块。艏部和尾部浮力补偿模块内置可压缩液体,随水下航行器下潜深度的增加,可压缩液体被压缩后体积变小,由此便可补偿海水密度变化引起的浮力变化量,从而令使水下航行器的能耗进一步降低。
技术特征:
1.一种水下航行器用应急自平衡装置,其特征在于,包括:
2.根据权利要求1所述的水下航行器用应急自平衡装置,其特征在于,所述电极端子包括第一阳极端子、第二阳极端子和阴极端子,所述第一阳极端子、第一牵拉导线和阴极端子连接构成所述第一电流通路;所述第二阳极端子、非承载导线、第二牵拉导线和阴极端子连接构成所述第二电流通路。
3.根据权利要求2所述的水下航行器用应急自平衡装置,其特征在于,所述应急浮力调节壳体为圆柱形构造,所述应急浮力调节壳体的内部构成圆环形的所述浮力调节密封腔,圆环形的所述浮力调节密封腔内侧形成下端开口的圆柱形的中心嵌槽,所述配重体是配装于所述中心嵌槽中的圆柱体构造。
4.根据权利要求2所述的水下航行器用应急自平衡装置,其特征在于,所述电磁阀安装于所述浮力调节密封腔中,所述应急浮力调节壳体的侧壁设有与所述电磁阀连通的孔口。
5.根据权利要求4所述的水下航行器用应急自平衡装置,其特征在于,所述应急浮力调节壳体的上部安装水密线缆接头,与所述电磁阀连通的所述非承载引线自所述水密线缆接头引出至所述应急浮力调节壳体外侧。
6.根据权利要求5所述的水下航行器用应急自平衡装置,其特征在于,所述应急浮力调节壳体的上部安装有密封堵头。
7.根据权利要求6所述的水下航行器用应急自平衡装置,其特征在于,所述应急浮力调节壳体安装抽气单向阀,所述抽气单向阀用于浮力调节密封腔形成真空。
8.一种水下航行器,包括依次连接的艏部总成、舯部耐压舱总成和艉部总成,其特征在于,所述艉部总成中安装权利要求1-7任一所述的应急自平衡装置。
9.根据权利要求8所述的水下航行器,其特征在于:所述艏部总成安装有艏部浮力补偿模块,所述艉部总成安装有尾部浮力补偿模块。
技术总结
本发明公开了一种水下航行器用应急自平衡装置以及水下航行器,属于水下航行器技术领域,应急自平衡装置包括基架、电极端子、第一牵拉导线、应急浮力调节壳体、电磁阀、第二牵拉导线和配重体;电极端子设于基架上;第一牵拉导线与电极端子形成第一电流通路;应急浮力调节壳体通过第一牵拉导线连接于基架,应急浮力调节壳体的内部设有浮力调节密封腔;电磁阀安装于应急浮力调节壳体,电磁阀与浮力调节密封腔连通,电磁阀连接非承载引线;第二牵拉导线与电极端子形成第二电流通路;配重体通过第二牵拉导线连接于应急浮力调节壳体。本装置可令水下航行器具备浮力自主应急调节功能,提高水下航行器的机动性,以及令水下航行器具备浮起后的自主调节功能。
技术研发人员:王延辉,孙通帅,杨绍琼,牛文栋,杨明,马伟,卢法良
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!