清洁机器人的制作方法
1.本实用新型涉及海洋工程装备技术领域,更具体地说,涉及一种清洁机器人。
背景技术:
2.船舶作为主要的海上运输与交通工具,对各个海洋领域都起到最基本的保障作用,例如:海上运输,海洋石油和其他能源开采,军事,及各种海洋平台建设。因此,船舶的运行效率很大程度的决定了其他海洋领域的建设与发展速度。
3.当船舶建成下水后,直至使命结束,几乎都在水中度过。而海洋环境复杂,位于海水表面以下的船体部分会受到多种海洋生物的污染,大量如藤壶类微生物喜欢寄生附着与船体表面。这已经是被广泛认同的,这些微生物会给船体带来了很多问题。其中最明显的则是,由微生物及其他物质的附着所产生的额外阻力大大的增加了船舶航行速度与油耗。据调查及实地试验,船舶航行速度可因此降低10%甚至更高,而这也意味着油耗可增加40%左右。
4.为解决这一所有船舶都面临的问题,船舶需要定期对船体表面进行清洗。现有技术一般为人工清洗,船舶需要进船坞离开水面,或者由专业的工作人员潜水进行清洗。进船坞维修清洗耗时长且费用昂贵,而由潜水蛙人清洗也需船舶开往指定地点,且对于清洗人员属于高危工作。
5.而且船体表面多为曲面状,清洁机器人一般具有较长的长度,现有的清洁机器人在曲面状的船体表面上行驶时,清洁机器人的本体容易与船体分离,不能很好的与船体表面贴合,致使移动过程不平稳、清洁效果不好。
6.综上,目前的船体清洗存在自动化程度不高、越障能力不佳、清洁效率不高的问题。
技术实现要素:
7.本实用新型的目的在于提供一种清洁机器人,旨在解决现有技术中的船体清洗自动化程度不高、越障能力不佳、清洁效率不高的技术问题。
8.为实现上述目的,本实用新型采用的技术方案如下:
9.本实用新型提供了一种清洁机器人,包括:
10.驱动模块,包括驱动舱和设于所述驱动舱上的第一移动部;
11.控制模块,包括控制舱和设于所述控制舱上的第二移动部;
12.清洗模块,包括清洗舱和设于所述清洗舱上的第三移动部;
13.其中,所述驱动舱用于提供所述清洁机器人移动的驱动力,所述控制舱与所述驱动舱和所述清洗舱电连接,用于收发所述清洁机器人的控制信号,所述清洗舱用于清洗船体表面,所述驱动舱、所述控制舱和所述清洗舱按照预设顺序依次转动连接,所述第一移动部、所述第二移动部和所述第三移动部均能够吸附在船体表面。
14.通过采用上述技术方案,清洁机器人包括驱动舱、控制舱和清洗舱,相邻两个舱体
之间转动连接,增加了舱体之间的活动自由度,使得清洁机器人在移动过程中能更加贴合曲面状的船体,提高了清洁机器人的越障能力;控制舱与驱动舱和清洗舱电连接,控制舱用于收发清洁机器人的控制信号,控制舱接收到远程遥控信息,并将该遥控信息发送至驱动舱和清洗舱,可以对驱动舱和清洗舱的工作状态进行控制,进而实现对船体表面的自动化清洁,相对于现有技术中所采用的人工清洁方式,本实用新型提升了船体清洗的自动化程度;如果采用人工清洗的方式对船体进行清洁,需要船舶需要进船坞离开水面,进船坞维修清洗耗时较长,而本实用新型不受地点的限制,可以随时随地进行清洁,提升了船体的清洁效率。
15.在一些实施例中,所述第一移动部包括第一履带轮组和第二履带轮组,所述第一履带轮组和第二履带轮组均为三角形结构,所述第一履带轮组与所述第二履带轮组与所述驱动舱内的驱动部传动连接并相对设置在所述驱动舱的两侧。
16.通过采用上述技术方案,相对于实心的框架,第一镂空框架使得清洁机器人拥有更轻的质量且保证了结构强度,而且减少了清洁机器人受到浪流的冲击力;堆叠放置的第一防水电机和第二防水电机可以大大减小驱动舱的体积。
17.在一些实施例中,所述驱动舱包括第一镂空框架,以及设于所述第一镂空框架内的驱动部,所述驱动部为堆叠放置的第一防水电机和第二防水电机,所述第一防水电机与所述第一履带轮组传动连接,所述第二防水电机与所述第二履带轮组传动连接。
18.通过采用上述技术方案,相对于实心的框架,第一镂空框架使得清洁机器人拥有更轻的质量且保证了结构强度,而且减少了清洁机器人受到浪流的冲击力;堆叠放置的第一防水电机和第二防水电机可以大大减小驱动舱的体积。
19.在一些实施例中,所述第一履带轮组包括相对设置的两块第一安装板,以及转动连接在两块第一安装板之间的三个履带轮,三个所述履带轮的转动中心连线呈三角形,三个所述履带轮通过第一履带传动连接,至少一个所述履带轮上同轴设置有传动齿轮,所述第一履带轮组还包括主动齿轮,所述主动齿轮与第一防水电机传动连接,所述主动齿轮与所述传动齿轮啮合;所述第二履带轮组包括相对设置的两块第一安装板,以及转动连接在两块第一安装板之间的三个履带轮,三个所述履带轮的转动中心连线呈三角形,三个所述履带轮通过第二履带传动连接,至少一个所述履带轮与第二防水电机传动连接。
20.通过采用上述技术方案,第一防水电机与主动齿轮传动连接,第二防水电机与第四履带轮传动连接,将第一防水电机与第二防水电机的电机轴错位开,便于第一防水电机与第二防水电机的堆叠放置,进而减小驱动舱的体积。
21.在一些实施例中,所述第二移动部为第三履带轮组,所述第三履带轮组为长条形结构,两个所述第三履带轮组相对设置在所述控制舱的两侧。
22.通过采用上述技术方案,相对于普通车轮,履带轮的越障能力更强,便于翻越粘附有各种垃圾的船体表面,提升了本实用新型的越障能力,进而保证清洁机器人行驶过程的稳定。
23.在一些实施例中,所述控制舱包括第二镂空框架,以及设于所述第二镂空框架内的防水密封舱,所述防水密封舱内设有控制电路板,所述控制电路板与清洗模块、驱动模块电连接,所述控制电路板上还集成有无线通讯模块。
24.通过采用上述技术方案,相对于实心的框架,第二镂空框架使得清洁机器人拥有
更轻的质量且保证了结构强度,而且减少了清洁机器人受到浪流的冲击力;无线通讯模块通过无线网络或卫星通讯实现无线信号的传递,便于使用者进行远程操控。
25.在一些实施例中,所述第三履带轮组包括相对设置的两块第二安装板,以及转动连接在两块第二安装板之间的两个履带轮,两个所述履带轮通过第三履带传动连接。
26.通过采用上述技术方案,相对于普通车轮,第三履带轮组与船体表面的接触面积大,对船体表面的压强小,越障能力强,而且行进过程更加平稳。
27.在一些实施例中,所述第三移动部为车轮,三个所述车轮设置在所述清洗舱上。
28.通过采用上述技术方案,三个车轮设置在清洗舱上,可以保证清洗舱的平稳移动。
29.在一些实施例中,所述清洗舱为空化射流清洗盘,所述车轮包括设于所述清洗舱上的连杆,以及与所述连杆转动连接的永磁轮。
30.通过采用上述技术方案,空化射流清洗盘的清洗效果好,而且在水下工作过程中,还能提供额外的吸附力,进而保证工作过程的稳定进行;永磁轮也可提供磁力吸附在船体表面上,保证行进过程的稳定。
31.在一些实施例中,所述驱动舱、所述控制舱和所述清洗舱按照预设顺序依次串接,相邻的两个舱之间通过可拆卸的转动副连接。
32.通过采用上述技术方案,相邻的两个舱之间通过可拆卸的转动副连接,便于对各个舱进行拆卸组装,便于改变各舱之间的连接顺序;同时,通过转动副可添加或更换更多其他的模块,使机器人拥有更多元化的工作能力,这便赋予了清洁机器人极大的扩展性。各个模块之间可以拆卸,也方便对机器人进行运输、存放,在发生故障时,可以只拆卸发生故障的模块进行维修,降低维修的成本。
附图说明
33.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
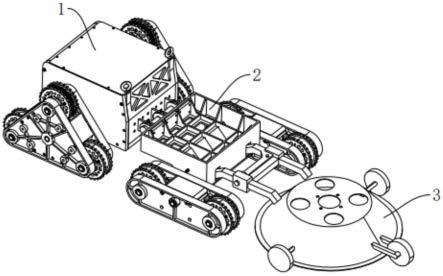
34.图1是本实用新型实施例提供的清洁机器人的立体结构图;
35.图2是本实用新型实施例提供的驱动模块的立体结构图;
36.图3是本实用新型实施例提供的驱动模块的内部结构图;
37.图4是本实用新型实施例提供的第一履带轮组的内部结构图;
38.图5是本实用新型实施例提供的第二履带轮组的内部结构图;
39.图6是本实用新型实施例提供的第一履带轮组的剖视图;
40.图7是图6中a处的局部放大图;
41.图8是本实用新型实施例提供的控制模块的立体结构图;
42.图9是本实用新型实施例提供的第三履带轮组的内部结构图;
43.图10是本实用新型实施例提供的清洁模块的立体结构图。
44.图中各附图标记为:1、驱动模块;11、驱动舱;111、第一镂空框架;12、第一履带轮组;121、第一履带轮;122、第二履带轮;123、第三履带轮;124、第一履带;125、主动齿轮;126、第一电机轴;127、传动齿轮;13、第二履带轮组;131、第四履带轮;132、第五履带轮;
133、第六履带轮;134、第二履带;135、第二电机轴;14、第一防水电机;15、第二防水电机;16、第一安装板;2、控制模块;21、第三履带轮组;211、第七履带轮;212、第八履带轮;213、第三履带;214、第二安装板;22、控制舱;221、第二镂空框架;23、第一转动副;24、第二转动副;3、清洗模块;31、清洗舱;32、车轮;321、连杆;322、永磁轮。
具体实施方式
45.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
46.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接位于另一个元件上或者间接位于另一个元件上。当一个元件被称为“连接于”另一个元件,它可以是直接连接或间接连接至另一个元件。
47.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型,而不是指示装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
48.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示相对重要性或指示技术特征的数量。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。以下结合具体实施例对本实用新型的具体实现进行更加详细的描述:
49.如图1、图2、图8、图9所示,本实用新型实施例提供的一种清洁机器人,包括:
50.驱动模块1,包括驱动舱11和设于驱动舱11上的第一移动部;
51.控制模块2,包括控制舱22和设于控制舱22上的第二移动部;
52.清洗模块3,包括清洗舱31和设于清洗舱31上的第三移动部;
53.其中,驱动舱11内设置有动力源,驱动舱11可以驱动第一移动部进行移动,驱动舱11用于提供清洁机器人移动的驱动力。控制舱22与驱动舱11和清洗舱31电连接,用于收发清洁机器人的控制信号,清洗舱31用于清洗船体表面,驱动舱11、控制舱22和清洗舱31按照预设顺序依次转动连接,该预设顺序可根据不同的任务需求和场景需求来进行调整,在本实施例中,该预设顺序优选为驱动舱11、控制舱22和清洗舱31首尾依次连接。
54.在一些实施例中,在各个模块外部都预留了各种探测类仪器设备安装口,为不同的工作需求提供不同的搭载仪器选择。第一移动部、第二移动部和第三移动部均能够吸附在船体表面。
55.在一些实施例中,第一移动部、第二移动部和第三移动部为具有永磁材料的履带轮,该永磁材料不限于铝镍钴系永磁合金、铁铬钴系永磁合金、永磁铁氧体、稀土永磁材料和复合永磁材料等,在本实施例中优选为钕铁硼永磁铁,由于船体一般都由磁性金属制作而成,所以第一移动部、第二移动部和第三移动部可以吸附在船体表面,由永磁材料组成的履带轮为清洁机器人提供足够的吸附力的同时,也提供行驶所须的行驶摩檫力;在另一些实施例中,第一移动部、第二移动部和第三移动部为带有真空吸盘的机械腿,真空吸盘与船体表面接触的空间被抽真空形成负压,进而可以实现将真空吸盘吸附在船体表面,且可通过操作机械腿实现清洁机器人的移动;在另一些实施例中,第一移动部、第二移动部和第三
移动部还可以为车轮。
56.在本实施例中,清洁机器人优选采用包含金属镀层的7系铝合金制作,在拥有足够强度的同时也拥有防腐蚀能力,且重量轻于海洋设备通常使用的316l不锈钢,价格低于钛合金。
57.上述实施方式的有益效果在于:清洁机器人包括驱动舱11、控制舱22和清洗舱31,相邻两个舱体之间转动连接,增加了舱体之间的活动自由度,使得清洁机器人在移动过程中能更加贴合曲面状的船体,提高了清洁机器人的越障能力;控制舱22与驱动舱11和清洗舱31电连接,控制舱22用于收发清洁机器人的控制信号,控制舱22接收到远程遥控信息,并将该遥控信息发送至驱动舱11和清洗舱31,可以对驱动舱11和清洗舱31的工作状态进行控制,进而实现对船体表面的自动化清洁,相对于现有技术中所采用的人工清洁方式,本实用新型提升了船体清洗的自动化程度;如果采用人工清洗的方式对船体进行清洁,需要船舶需要进船坞离开水面,进船坞维修清洗耗时较长,而本实用新型不受地点的限制,可以随时随地进行清洁,提升了船体的清洁效率。
58.如图2所示,作为本实施例的其中一种可选实施方式,第一移动部包括第一履带轮组12和第二履带轮组13,所述第一履带轮组和第二履带轮组均为三角形结构,第一履带轮组12和第二履带轮组13上都分别具有永磁材料,相对于普通车轮,履带轮的越障能力更强,便于翻越粘附有各种垃圾的船体表面,第一履带轮组12与第二履带轮组13与驱动舱11内的驱动部传动连接并相对设置在驱动舱11的两侧。
59.上述实施方式的有益效果在于:相对于普通车轮,履带轮的越障能力更强,便于翻越粘附有各种垃圾的船体表面,提升了本实用新型的越障能力,进而保证清洁机器人行驶过程的稳定。
60.如图2、图3所示,作为本实施例的其中一种可选实施方式,驱动舱11包括第一镂空框架111,相对于实心的框架,第一镂空框架111使得清洁机器人拥有更轻的质量且保证了结构强度;更重要的是,清洁机器人在水中作业受到海浪冲击时,海浪会穿过镂空部位,避免海浪的冲击力直接作用在清洁机器人上,进而减少了清洁机器人受到浪流的冲击力,以及设于第一镂空框架111内的驱动部,驱动部可以为旋转电机或旋转气缸等;在本实施例中,驱动部优选为堆叠放置的第一防水电机14和第二防水电机15,第一防水电机14与第一履带轮组12传动连接,第二防水电机15与第二履带轮组13传动连接。堆叠放置的第一防水电机14和第二防水电机15可以大大减小驱动舱11的体积。
61.上述实施方式的有益效果在于:相对于实心的框架,第一镂空框架111使得清洁机器人拥有更轻的质量且保证了结构强度,而且减少了清洁机器人受到浪流的冲击力;堆叠放置的第一防水电机14和第二防水电机15可以大大减小驱动舱11的体积。
62.如图2至图7所示,作为本实施例的其中一种可选实施方式,第一履带轮组12包括相对设置的两块第一安装板16,以及转动连接在两块第一安装板16之间的三个履带轮,第一安装板16固定连接在驱动舱11上,三个履带轮分别为:第一履带轮121、第二履带轮122以及第三履带轮123,三个履带轮的转动中心连线呈三角形,三个履带轮通过第一履带124传动连接,至少一个履带轮上同轴设置有传动齿轮127,在本实施例中,优选为第一履带轮121与传动齿轮127同轴连接,第一履带轮组12还包括主动齿轮125,主动齿轮125与第一防水电机14的第一电机轴126传动连接,主动齿轮125与传动齿轮127啮合;第一防水电机14转动,
会带动主动齿轮125转动,通过传动齿轮127将转动传递至第一履带轮121,第一履带轮121转动并驱动第一履带124、第二履带轮122以及第三履带轮123转动,实现第一履带轮组12的移动;第二履带轮组13包括相对设置的两块第一安装板16,以及转动连接在两块第一安装板16之间的三个履带轮,第一安装板16固定连接在驱动舱11上,三个履带轮分别为:第四履带轮131、第五履带轮132以及第六履带轮133,三个履带轮的转动中心连线呈三角形,三个履带轮通过第二履带134传动连接,至少一个履带轮与第二防水电机15传动连接,在本实施例中,优选为第四履带轮131与第二防水电机15的第二电机轴135传动连接。第二防水电机15转动,会带动第四履带轮131转动,第四履带轮131转动并驱动第二履带134、第五履带轮132以及第六履带轮133转动,实现第二履带轮组13的移动;第一防水电机14和第二防水电机15之间可以实现同步转动,进而实现第一履带轮组12与第二履带轮组13之间的同步运动。在本实施例中,第一防水电机14与第二防水电机15优选为铝合金材质的伺服电机,在保证其拥有足够的扭矩及可操控性的前提下,密闭的铝合金外壳可保证在水下环境工作中的防水效果,且电机的重量低于不锈钢,能减轻清洁机器人的总重,便于清洁机器人的搬运和转移。
63.上述实施方式的有益效果在于:第一防水电机14与主动齿轮125传动连接,第二防水电机15与第四履带轮131传动连接,将第一防水电机14与第二防水电机15的电机轴错位开,便于第一防水电机14与第二防水电机15的堆叠放置,进而减小驱动舱11的体积。
64.如图8所示,作为本实施例的其中一种可选实施方式,第二移动部为第三履带轮组21,所述第三履带轮组为长条形结构,两个第三履带轮组21相对设置在控制舱22的两侧。
65.上述实施方式的有益效果在于:相对于普通车轮,履带轮的越障能力更强,便于翻越粘附有各种垃圾的船体表面,提升了本实用新型的越障能力,进而保证清洁机器人行驶过程的稳定。
66.如图8所示,作为本实施例的其中一种可选实施方式,控制舱22包括第二镂空框架221,以及设于第二镂空框架221内的防水密封舱,相对于实心的框架,第二镂空框架221使得清洁机器人拥有更轻的质量且保证了结构强度;更重要的是,清洁机器人在水中作业受到海浪冲击时,海浪会穿过镂空部位,避免海浪的冲击力直接作用在清洁机器人上,进而减少了清洁机器人受到浪流的冲击力,防水密封舱内设有控制电路板,控制电路板与清洗模块3、驱动模块1电连接,控制电路板上还集成有无线通讯模块。无线通讯模块通过无线网络或卫星通讯实现无线信号的传递,便于使用者进行远程操控。
67.上述实施方式的有益效果在于:相对于实心的框架,第二镂空框架221使得清洁机器人拥有更轻的质量且保证了结构强度,而且减少了清洁机器人受到浪流的冲击力;无线通讯模块通过无线网络或卫星通讯实现无线信号的传递,便于使用者进行远程操控。
68.如图8、图9所示,作为本实施例的其中一种可选实施方式,第三履带轮组21包括相对设置的两块第二安装板214,以及转动连接在两块第二安装板214之间的两个履带轮,第二安装板214固定连接在控制舱22上,两个履带轮分别为:第七履带轮211和第八履带轮212,两个履带轮通过第三履带213传动连接。
69.上述实施方式的有益效果在于:相对于普通车轮,第三履带轮组21与船体表面的接触面积大,对船体表面的压强小,越障能力强,而且行进过程更加平稳。
70.如图10所示,作为本实施例的其中一种可选实施方式,第三移动部为车轮32,三个
车轮32设置在清洗舱31上。三个车轮设置在清洗舱31上,可以保证清洗舱31的平稳移动。
71.上述实施方式的有益效果在于:三个车轮设置在清洗舱31上,可以保证清洗舱31的平稳移动。
72.如图10所示,作为本实施例的其中一种可选实施方式,清洗舱31为空化射流清洗盘,空化射流清洗盘为现有技术,其结构与实施原理为本领域技术人员所以公知的常识,本技术对此不再进行赘述;空化射流清洗盘可通过旋转底部喷头在盘底产生负压,提供额外吸附力。且清洗盘顶部有一额外喷头,在需要更大吸附力时,可通过推力吸附的方式提供额外吸附力;车轮32包括设于清洗舱上的连杆321,以及与连杆321转动连接的永磁轮322。
73.上述实施方式的有益效果在于:空化射流清洗盘的清洗效果好,而且在水下工作过程中,还能提供额外的吸附力,进而保证工作过程的稳定进行;永磁轮322也可提供磁力吸附在船体表面上,保证行进过程的稳定。
74.如图1、图2、图8所示,作为本实施例的其中一种可选实施方式,驱动舱11、控制舱22和清洗舱31按照预设顺序依次串接,相邻的两个舱之间通过可拆卸的转动副连接。在一些实施例中,转动副优选为滑动轴承式转动副;在另一些实施例中,转动副优选为滚动轴承式转动副;在本实施例中,优选为驱动舱11与控制舱22之间通过第一转动副23连接,控制舱22与清洗舱31之间通过第二转动副24连接。
75.上述实施方式的有益效果在于:相邻的两个舱之间通过可拆卸的转动副连接,便于对各个舱进行拆卸组装,便于改变各舱之间的连接顺序;同时,通过转动副可添加或更换更多其他的模块,使机器人拥有更多元化的工作能力,这便赋予了清洁机器人极大的扩展性。各个模块之间可以拆卸,也方便对机器人进行运输、存放,在发生故障时,可以只拆卸发生故障的模块进行维修,降低维修的成本。
76.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1