一种新型仿生章鱼水下探测机器人
本技术涉及水下设备,尤其涉及一种新型仿生章鱼水下探测机器人。
背景技术:
1、无人水下机器人是水下机器人常见的技术之一。水下机器人的主要作用有:科研人员的水文学术调查、海上石油勘探调查、天然气开发等。
2、然而现有的仿生水下探测机器人在水下定位、线路规划、绘制目标、制造、外形设计等方面与发达国家仍有一定的差距,在实际水下潜行工作中,仍存在一些问题。我国海洋考察工作量大,环境复杂,我国海洋工作开展困难。因此,必须加快水下仿生机器人的研发,保障我国海洋开发工作的持续发展。
3、现有的水下仿生机器人具有较强的指向性导致功能单一,操作系统更为困难,难以广泛应用。在水下救援和打捞物品的应用领域也同样有局限性,需要在特定的水域才能正常投入使用,通过机械爪的方式进行打捞容易使脆性较大的打捞物遭到破坏。
4、当前,水下仿生机器人技术存在着较大的空白,仿生较多的是仿生鱼,仿生鱿鱼,仿生蛇等,在仿生章鱼方面的研究较少。以上仿生机器人实际功能只是探测、打捞、实验室数据研究、观赏互动等等,仿生机器人没有固定装置,不能固定在水下某一位置,多少都会随着水流运动,无法保证机器人在实际水下潜行时进行相关工作。
技术实现思路
1、根据上述提出的技术问题,而提供一种新型仿生章鱼水下探测机器人。本实用新型主要利用整机采用八足铰接驱动结构与吸盘式触角减震结构,具有强劲运动能力与减震效果,潜水装置通过给排水实现上浮和下沉,在转向装置的配合下,可以实现整机的转向,在运动中完成相应工作。本实用新型采用的技术手段如下:
2、一种新型仿生章鱼水下探测机器人,包括:
3、外壳,包括相连接的第一壳体和第二壳体,第一壳体与第二壳体之间连接有连接板,连接板与第一壳体之间形成第一容纳腔室,连接板与第二壳体之间形成第二容纳腔室;
4、潜水装置,安装在第二壳体上,置于第二容纳腔室中且位于连接板下方,用于实现整个机器人的上浮和下沉;
5、转向装置,安装在第二壳体上,置于第二容纳腔室中且位于连接板下方,用于实现整个机器人的转向;
6、尾部驱动装置,包括第一驱动机构、基座、第二驱动机构、多个仿生爪和吸附装置,第一驱动机构安装在第二壳体下部并位于第二容纳腔室中,基座与第二壳体底部连接;多个仿生爪与基座转动连接,第二驱动机构安装在基座下方,与仿生爪相连,用于实现仿生爪的张开和收缩,吸附装置连接在仿生爪的底端,具有吸附功能。
7、进一步地,所述转向装置包括第一支架、转向叶轮和转向电动机,第一支架固定在第二壳体上,转向电动机安装在第一支架上,转向叶轮安装在转向电动机的输出轴上并位于第一支架上的圆筒内。
8、进一步地,所述潜水装置包括外壳ⅰ、减速电机、活塞、潜水丝杆和螺母,外壳ⅰ安装在第二壳体上,内部具有通孔;减速电机安装在外壳ⅰ的一端,其电机轴与潜水丝杆的一端相连,潜水丝杆的另一端连接活塞;螺母嵌入活塞中,与潜水丝杆的另一端端部相连。
9、进一步地,所述第一驱动机构包括第二支架、驱动电动机和驱动叶轮,第二支架安装在第二壳体的底部,驱动电动机安装在第二支架上,驱动叶轮与驱动电动机的电机轴连接,并位于第二支架上的圆筒内。
10、进一步地,所述第一驱动机构设置有两组,对称设置。
11、进一步地,所述第二驱动机构包括电动机、尾部丝杆、连杆和多向联接器,电动机安装在基座下方,其电机轴朝下且与尾部丝杆连接,尾部丝杆与多向联接器连接,尾部丝杆下端穿出多向联接器的端部连接螺母,多向联接器周向转动连接有多个连杆,每个连杆与一个仿生爪转动连接。
12、进一步地,所述吸附装置采用缓冲吸盘,其中心处隆起。
13、进一步地,所述仿生爪呈向外凸起的弧形杆件结构,多个所述仿生爪在圆周方向上呈均匀分布。
14、较现有技术相比,本实用新型具有以下优点:
15、1、本实用新型提供的新型仿生章鱼水下探测机器人,包括潜水装置、转向装置、尾部驱动装置和吸附装置。整机采用八足铰接驱动结构与吸盘式触角减震结构,具有强劲运动能力与减震效果,潜水装置通过给排水实现上浮和下沉,在转向装置的配合下,可以实现整机的转向,在运动中完成相应工作。另外动力系统采用无刷电机作为控制电机为整机提供了充足的动力保证;供能系统为锂电池组成,清洁环保且效率高。
16、2、本实用新型提供的新型仿生章鱼水下探测机器人,潜水装置位于整机中部,是实现整机上浮和下沉的关键载体,由精密减速电机、丝杆螺母、活塞等组成,将螺母嵌入活塞中,通过电机带动丝杆实现活塞运动,便达到了给排水的功能,实现整机的上浮下沉;潜水装置使用材料较少,但其功能强大且全面。
17、3、本实用新型提供的新型仿生章鱼水下探测机器人,为了整机能够适应复杂环境,具有较强通过性能,采取流线型、驱动型设计外壳,颠覆传统的驱动结构模型,设计全新仿生八足结构,采用铰接结构,通过一个动力源即可实现八足的开合,且八足结构运动灵活,效率高,具有较大机动性。
18、4、本实用新型提供的新型仿生章鱼水下探测机器人,吸盘式触角避震结构位于整机最下方,吸盘式触角避震结构可以保证整机在适应复杂环境情况下减小冲击载荷,防止零部件受到冲击载荷后发生弯曲或者断裂现象,可以提高整机的零部件使用寿命;故采用仿生八足铰接吸盘式触角避震结构模块。
19、基于上述理由本实用新型可在水下救援和打捞物品等领域广泛推广。
技术特征:
1.一种新型仿生章鱼水下探测机器人,其特征在于,包括:
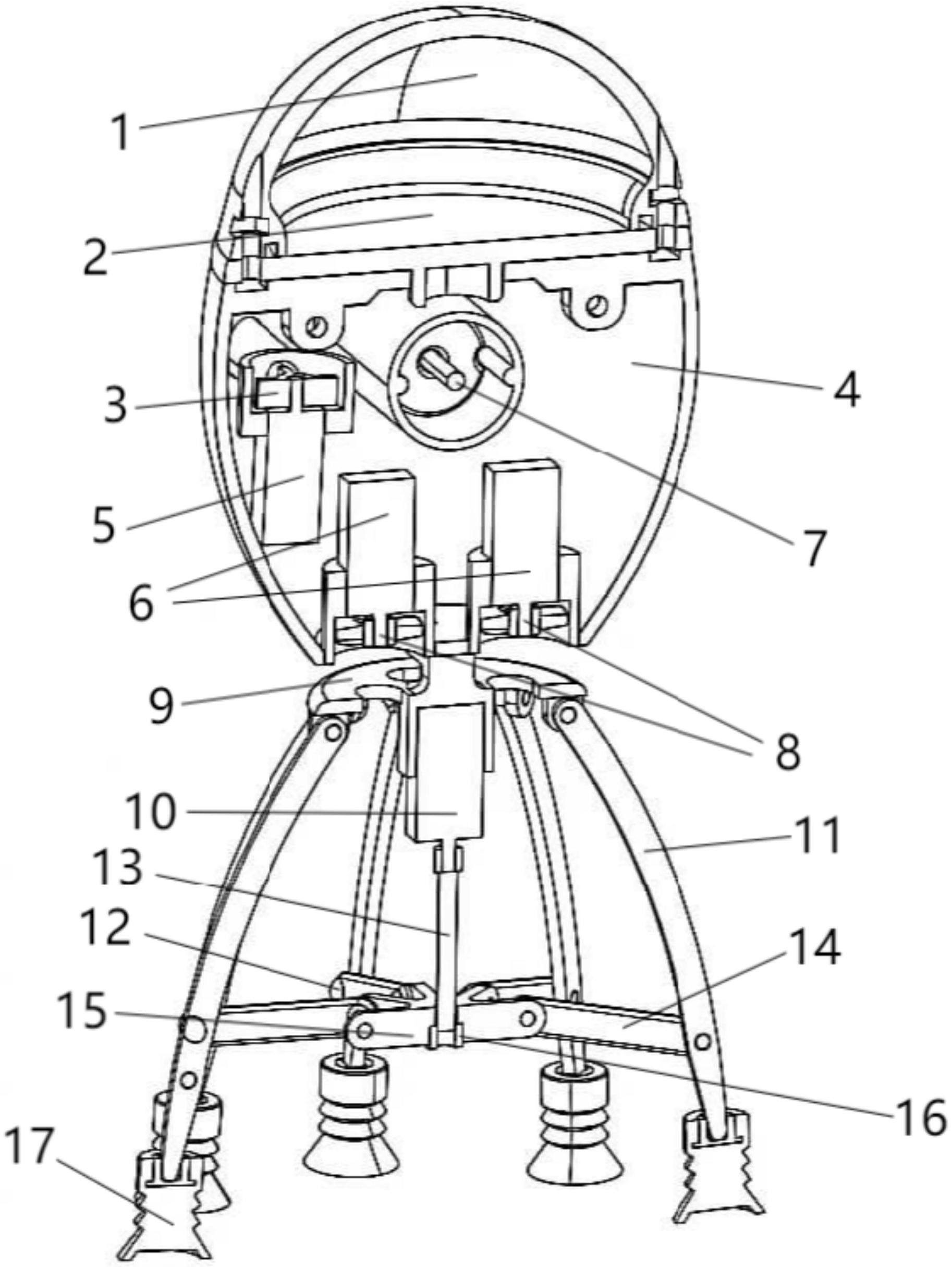
2.根据权利要求1所述的新型仿生章鱼水下探测机器人,其特征在于,所述转向装置包括第一支架、转向叶轮(3)和转向电动机(5),第一支架固定在第二壳体上,转向电动机(5)安装在第一支架上,转向叶轮(3)安装在转向电动机(5)的输出轴上并位于第一支架上的圆筒内。
3.根据权利要求1所述的新型仿生章鱼水下探测机器人,其特征在于,所述潜水装置包括外壳ⅰ、减速电机、活塞、潜水丝杆(7)和螺母ⅰ,外壳ⅰ安装在第二壳体上,内部具有通孔;减速电机安装在外壳ⅰ的一端,其电机轴与潜水丝杆(7)的一端相连,潜水丝杆(7)的另一端连接活塞;螺母ⅰ嵌入活塞中,与潜水丝杆(7)的另一端端部相连。
4.根据权利要求1所述的新型仿生章鱼水下探测机器人,其特征在于,所述第一驱动机构包括第二支架、驱动电动机(6)和驱动叶轮(8),第二支架安装在第二壳体的底部,驱动电动机(6)安装在第二支架上,驱动叶轮(8)与驱动电动机(6)的电机轴连接,并位于第二支架上的圆筒内。
5.根据权利要求4所述的新型仿生章鱼水下探测机器人,其特征在于,所述第一驱动机构设置有两组,对称设置。
6.根据权利要求1所述的新型仿生章鱼水下探测机器人,其特征在于,所述第二驱动机构包括电动机(10)、尾部丝杆(13)、连杆(14)和多向联接器,电动机(10)安装在基座(9)下方,其电机轴朝下且与尾部丝杆(13)连接,尾部丝杆(13)与多向联接器连接,尾部丝杆(13)下端穿出多向联接器的端部连接螺母(16),多向联接器周向转动连接有多个连杆(14),每个连杆(14)与一个仿生爪(11)转动连接。
7.根据权利要求1所述的新型仿生章鱼水下探测机器人,其特征在于,所述吸附装置采用缓冲吸盘(17),其中心处隆起。
8.根据权利要求1或6所述的新型仿生章鱼水下探测机器人,其特征在于,所述仿生爪(11)呈向外凸起的弧形杆件结构,多个所述仿生爪(11)在圆周方向上呈均匀分布。
技术总结
本技术提供一种新型仿生章鱼水下探测机器人,包括:外壳,包括第一壳体和第二壳体,第一壳体与第二壳体之间连接连接板,连接板与第一壳体间形成第一容纳腔室,连接板与第二壳体间形成第二容纳腔室;潜水装置,安装在第二壳体上,置于第二容纳腔室中且位于连接板下方;转向装置,安装在第二壳体上,置于第二容纳腔室中且位于连接板下方;尾部驱动装置,包括第一驱动机构、基座、第二驱动机构、多个仿生爪和吸附装置,第一驱动机构安装在第二壳体下部并位于第二容纳腔室中,基座与第二壳体底部连接;多个仿生爪与基座转动连接,第二驱动机构安装在基座下方,与仿生爪相连,吸附装置连接在仿生爪的底端。本技术具有强劲运动能力与减震效果。
技术研发人员:刘笑全,吉翔宇,袁秣颇,刘海影
受保护的技术使用者:大连科技学院
技术研发日:20220824
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!