一种水下地形测量无人船的制作方法
本技术涉及水下地形测量,尤其涉及一种水下地形测量无人船。
背景技术:
1、随着国民经济的快速发展,水利建设对国家建设越来越重要,在水利工程建设及河湖水库综合治理方面,迫切需要解决水下地形测量的精确性和实时性问题,研究水下探深方法并利用先进技术测深,可提供水下地形测量精度及作业效率。
2、传统的水下地形测量的项目中,主要是为船舶带上大型设备到指定的水域进行测量的作业,在浅滩或是浅水河流中主要是通过人工携带测量设备下水的方式进行测量作业,测量的方式不仅费时费力还具有很大的危险性,因此需要一种水下地形测量无人船,进行检测。
技术实现思路
1、本实用新型的主要目的是为了提供一种水下地形测量无人船,将测量无人船主体放置在水面上,启动拍摄件进行拍摄环境和检测实时环境,本设备为无人测量结构,便于操作和使用。
2、本实用新型的目的可以通过采用如下技术方案达到:
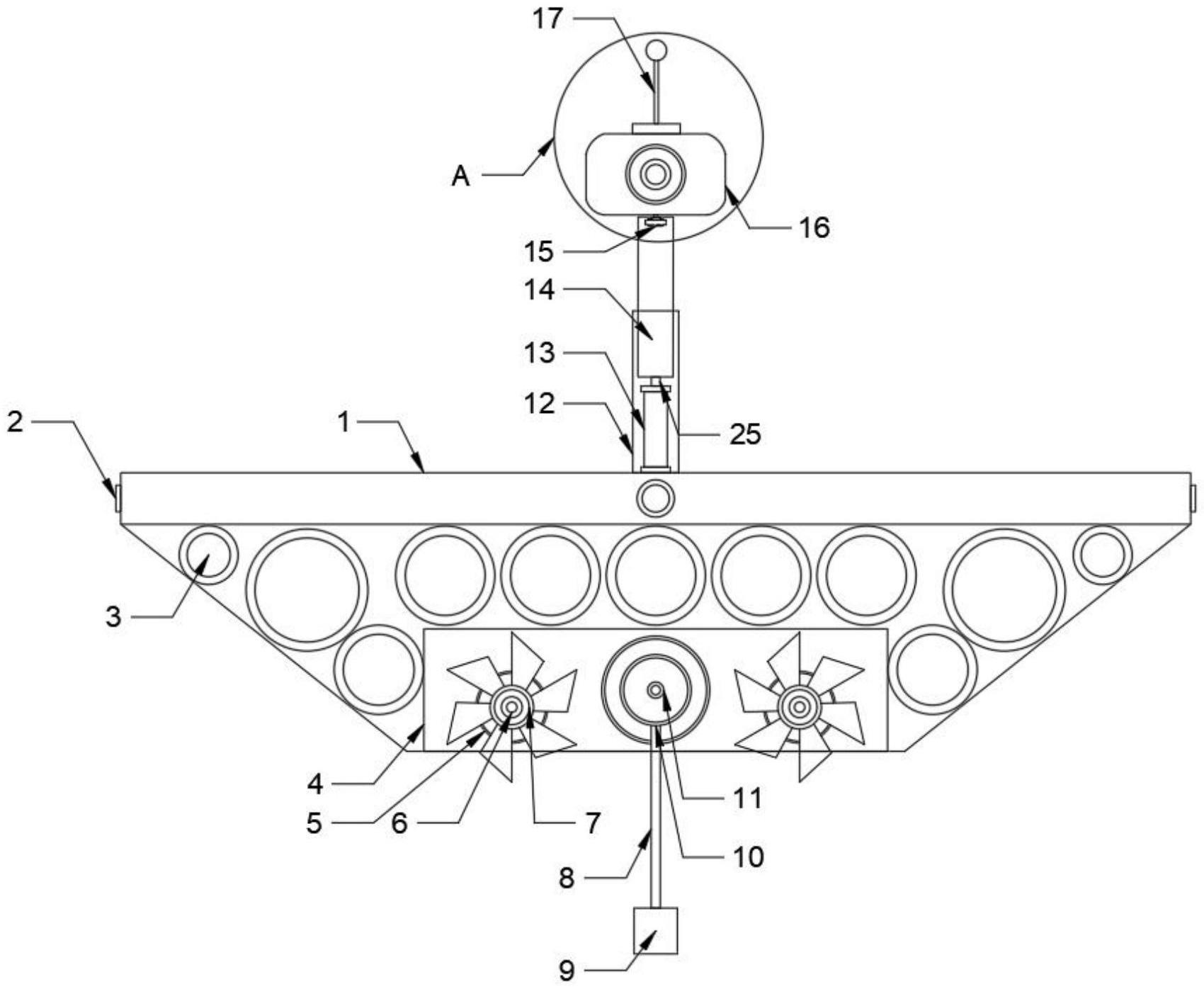
3、一种水下地形测量无人船,包括测量无人船主体,测量无人船主体底部等间距安装有增浮气囊,测量无人船主体四侧安装有防碰撞件,测量无人船主体底中部安装有驱动腔,驱动腔中间安装有第二转动杆,第二转动杆安装有连接绳索,连接绳索底部安装有增重深度测量件,驱动腔内壁一侧安装有第二电机,且第二电机与第二转动杆连接,第二转动杆上套有收卷轮,连接绳索绕设在收卷轮上,收卷轮两侧安装有驱动舵叶组件,测量无人船主体顶部中部安装有套管组件,套管组件上安装有升降组件,套管组件上安装有拍摄转动组件,测量无人船主体上安装有模块组件,驱动舵叶组件包括转动杆和驱动舵叶,转动杆安装在第一电机的输出端,驱动舵叶套设在转动杆中间处。
4、优选的,套管组件包括外限位套管和内伸缩套管,外限位套管安装在测量无人船主体上,内伸缩套管插入进外限位套管中上段伸缩连接。
5、优选的,升降组件包括电动伸缩杆和活塞杆,电动伸缩杆安装在外限位套管内底部处,活塞杆安装在电动伸缩杆的输出端,内伸缩套管与活塞杆连接。
6、优选的,拍摄转动组件包括驱动电机、拍摄件和信号增强件,驱动电机安装在内伸缩套管顶部处,拍摄件安装在驱动电机的输出端,信号增强件安装在拍摄件顶中部处。
7、优选的,模块组件包括控制模块、前后驱动模块、深度测量模块、环境拍摄模块、信号增强模块和信号传输模块,控制模块与前后驱动模块电性连接,前后驱动模块与深度测量模块电性连接,深度测量模块与环境拍摄模块电性连接,带动环境拍摄模块与信号增强模块电性连接,信号增强模块与信号传输模块电性连接。
8、本实用新型的有益技术效果:
9、本实用新型提供的一种水下地形测量无人船,将测量无人船主体放置在水面上,启动拍摄件进行拍摄环境和检测实时环境,通过启动第一电机带动驱动舵叶进行转动,通过驱动舵叶的转动推动测量无人船主体进行移动,在移动到需要的位置处启动第二电机带动连接绳索和增重深度测量件进行升降,在升降的过程中对水域的深度进行侧量,测量好后将信息进行传输,测量好后通过启动第二电机带动连接绳索和增重深度测量件上升,本设备为无人测量结构,便于操作和使用。
技术特征:
1.一种水下地形测量无人船,其特征在于:包括测量无人船主体(1),测量无人船主体(1)底部等间距安装有增浮气囊(3),测量无人船主体(1)四侧安装有防碰撞件(2),测量无人船主体(1)底中部安装有驱动腔(4),驱动腔(4)中间安装有第二转动杆(11),第二转动杆(11)安装有连接绳索(8),连接绳索(8)底部安装有增重深度测量件(9),驱动腔(4)内壁一侧安装有第二电机,且第二电机与第二转动杆(11)连接,第二转动杆(11)上套有收卷轮(10),连接绳索(8)绕设在收卷轮(10)上,收卷轮(10)两侧安装有驱动舵叶组件,测量无人船主体(1)顶部中部安装有套管组件,套管组件上安装有升降组件,套管组件上安装有拍摄转动组件,测量无人船主体(1)上安装有模块组件,驱动舵叶组件包括转动杆(6)和驱动舵叶(7),转动杆(6)安装在第一电机(5)的输出端,驱动舵叶(7)套设在转动杆(6)中间处。
2.根据权利要求1所述的一种水下地形测量无人船,其特征在于:套管组件包括外限位套管(12)和内伸缩套管(14),外限位套管(12)安装在测量无人船主体(1)上,内伸缩套管(14)插入进外限位套管(12)中上段伸缩连接。
3.根据权利要求2所述的一种水下地形测量无人船,其特征在于:升降组件包括电动伸缩杆(13)和活塞杆(25),电动伸缩杆(13)安装在外限位套管(12)内底部处,活塞杆(25)安装在电动伸缩杆(13)的输出端,内伸缩套管(14)与活塞杆(25)连接。
4.根据权利要求3所述的一种水下地形测量无人船,其特征在于:拍摄转动组件包括驱动电机(15)、拍摄件(16)和信号增强件(17),驱动电机(15)安装在内伸缩套管(14)顶部处,拍摄件(16)安装在驱动电机(15)的输出端,信号增强件(17)安装在拍摄件(16)顶中部处。
5.根据权利要求4所述的一种水下地形测量无人船,其特征在于:模块组件包括控制模块(19)、前后驱动模块(20)、深度测量模块(21)、环境拍摄模块(22)、信号增强模块(23)和信号传输模块(24),控制模块(19)与前后驱动模块(20)电性连接,前后驱动模块(20)与深度测量模块(21)电性连接,深度测量模块(21)与环境拍摄模块(22)电性连接,带动环境拍摄模块(22)与信号增强模块(23)电性连接,信号增强模块(23)与信号传输模块(24)电性连接。
技术总结
本技术公开了一种水下地形测量无人船,属于地形测量技术领域,测量无人船主体内底部等间距安装有增浮气囊,测量无人船主体四侧安装有防碰撞件,连接绳索底部安装有增重深度测量件,驱动舵叶组件包括转动杆和驱动舵叶,转动杆安装在第二电机的输出端,通过启动第一电机带动驱动舵叶进行转动,通过驱动舵叶的转动推动测量无人船主体进行移动,在移动到需要的位置处启动第二电机带动连接绳索和增重深度测量件进行升降,在升降的过程中对水域的深度进行侧量,测量好后将信息进行传输,测量好后通过启动第二电机带动连接绳索和增重深度测量件上升,本设备为无人测量结构,便于操作和使用。
技术研发人员:刘欧丁,张可,梁广蕊,李超凡
受保护的技术使用者:中建六局水利水电建设集团有限公司
技术研发日:20221122
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!