一种具有吸附功能的水下移动式机器人
本技术属于水下机器人,尤其涉及一种具有吸附功能的水下移动式机器人。
背景技术:
1、在自然界中,采用柔性长鳍波动方式推进的鱼类在游动过程中,可仅依靠波动轻质柔软的长鳍获得推力,并且通过改变鳍面产生的推进行波波形、波频、波长和波传播方向等要素控制推力的大小和方向。由于这种推进方式具有流体扰动小并可产生矢量推力等显著优点,因此具有广阔的应用前景和理论研究价值。除此之外,现有水下吸附技术的应用主要用于清洁船体,无疑浪费了机器人在水下可以自由移动的优势。
技术实现思路
1、本实用新型的目的在于提供一种具有吸附功能的水下移动式机器人,旨在解决所述背景技术中存在的问题。为实现所述目的,本实用新型采用的技术方案是:
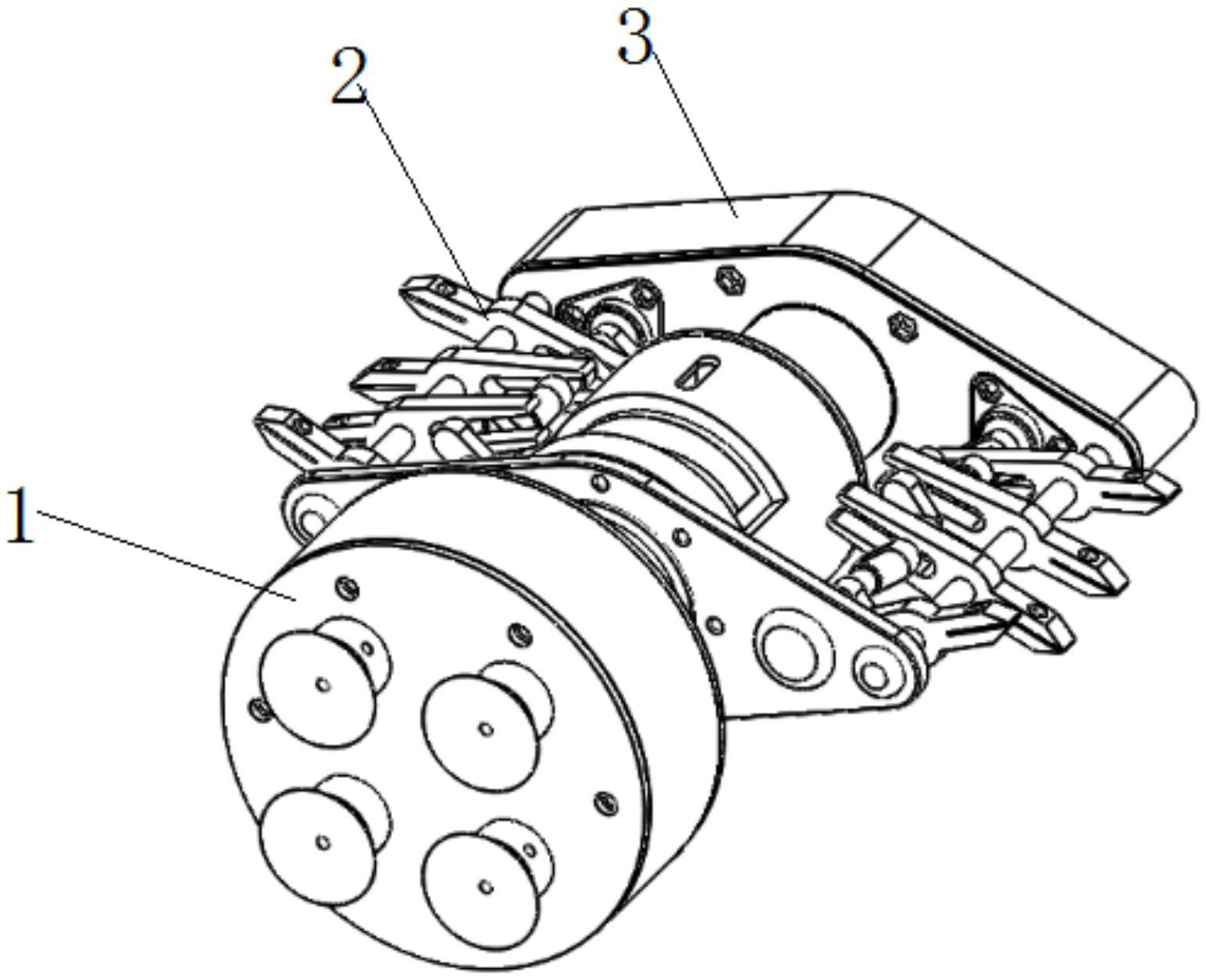
2、一种具有吸附功能的水下移动式机器人,包括吸盘箱、正弦波运动机构和驱动机构,所述吸盘箱固定安装在所述正弦波运动机构的一端,所述驱动机构安装在所述正弦波运动机构的另一端,所述正弦波运动机构包括控制模块以及设在控制模块两侧的曲轴运动机构,所述控制模块的前后两端分别固定在前部支架和电机支架上,所述控制模块内设磁吸充电安装口和遥控接收器安装口。
3、优选的,所述曲轴运动机构包括转轴密封盖、曲足摇臂、曲轴、侧轴,所述侧轴的两端固定安装在所述前部支架和电机支架上,所述转轴密封盖固定在所述电机支架上,所述曲足摇臂设有多个,且所述曲足摇臂的前部由侧轴贯穿,尾部由所述曲轴穿过,所述曲轴一端贯穿所述转轴密封盖后与所述驱动机构连接。
4、优选的,所述驱动机构包括减速电机箱以及安装在所述减速电机箱内的直流减速电机和伞形齿轮,所述直流减速电机的输出端与所述伞形齿轮啮合,所述伞形齿轮的底部连接所述曲轴,用于驱动所述曲轴旋转。
5、优选的,所述吸盘箱包括吸盘、吸盘固定板、铜柱、水泵、水泵固定板、进出水孔和固定环,所述吸盘固定板、固定环和水泵固定板共同构成箱体结构,所述水泵安装在所述水泵固定板上,所述水泵固定板的上周侧设有锁定铜柱,所述铜柱的顶部固定连接在所述吸盘固定板上,所述吸盘安装在所述吸盘固定板上端,所述水泵固定板上还开设有所述进出水孔。
6、本实用新型的有益效果:
7、使用仿乌贼肉鳍的正弦波运动作为动力,具有稳定前进和转向的优点;
8、用软胶作为正弦波摆动的部件,满足正弦波摆动时变形的需要;
9、用磁吸充电口作为充电装置,可以有效防止进水的同时也方便充电时处理充电口的水珠;
10、使用以水泵作为吸盘吸附的动力,通过电机驱动模块改变电机正负极,使吸盘能够任意切换吸附和排斥两种功能;通过吸附在其他设备的机体上,通过其他机体带动位移到更远的目的地进行作业。大大节省了自身电机运动时的损耗,更加快捷的到达目的地。。
技术特征:
1.一种具有吸附功能的水下移动式机器人,其特征在于:包括吸盘箱、正弦波运动机构和驱动机构,所述吸盘箱固定安装在所述正弦波运动机构的一端,所述驱动机构安装在所述正弦波运动机构的另一端,所述正弦波运动机构包括控制模块以及设在控制模块两侧的曲轴运动机构,所述控制模块的前后两端分别固定在前部支架和电机支架上,所述控制模块内设磁吸充电安装口和遥控接收器安装口。
2.根据权利要求1所述的一种具有吸附功能的水下移动式机器人,其特征在于:所述曲轴运动机构包括转轴密封盖、曲足摇臂、曲轴、侧轴,所述侧轴的两端固定安装在所述前部支架和电机支架上,所述转轴密封盖固定在所述电机支架上,所述曲足摇臂设有多个,且所述曲足摇臂的前部由侧轴贯穿,尾部由所述曲轴穿过,所述曲轴一端贯穿所述转轴密封盖后与所述驱动机构连接。
3.根据权利要求2所述的一种具有吸附功能的水下移动式机器人,其特征在于:所述驱动机构包括减速电机箱以及安装在所述减速电机箱内的直流减速电机和伞形齿轮,所述直流减速电机的输出端与所述伞形齿轮啮合,所述伞形齿轮的底部连接所述曲轴,用于驱动所述曲轴旋转。
4.根据权利要求3所述的一种具有吸附功能的水下移动式机器人,其特征在于:所述吸盘箱包括吸盘、吸盘固定板、铜柱、水泵、水泵固定板、进出水孔和固定环,所述吸盘固定板、固定环和水泵固定板共同构成箱体结构,所述水泵安装在所述水泵固定板上,所述水泵固定板的上周侧设有锁定铜柱,所述铜柱的顶部固定连接在所述吸盘固定板上,所述吸盘安装在所述吸盘固定板上端,所述水泵固定板上还开设有所述进出水孔。
技术总结
本技术公开了一种具有吸附功能的水下移动式机器人,包括吸盘箱、正弦波运动机构和驱动机构,所述吸盘箱固定安装在所述正弦波运动机构的一端,所述驱动机构安装在所述正弦波运动机构的另一端,所述正弦波运动机构包括控制模块以及设在控制模块两侧的曲轴运动机构,所述控制模块的前后两端分别固定在前部支架和电机支架上,所述控制模块内设磁吸充电安装口和遥控接收器安装口。本技术使用仿乌贼肉鳍的正弦波运动作为动力,具有稳定前进和转向的优点;同时具备吸盘功能,通过吸附在其他设备的机体上,通过其他机体带动位移到更远的目的地进行作业。大大节省了自身电机运动时的损耗,更加快捷的到达目的地。
技术研发人员:刁幸荣,柯文德
受保护的技术使用者:南方科技大学
技术研发日:20221220
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!