一种基于鞭毛的水下仿生推进装置的制作方法
本发明涉及水下动力推进,更具体地说,它涉及一种基于鞭毛的水下仿生推进装置。
背景技术:
1、目前,国内外主要采用螺旋推进器作为水上或水下游动的动力装置,该方式主要依靠螺旋桨快速旋转,通过桨叶不断把大量的水向后推去,利用作用力与反作用力而形成向前的推力。
2、采用螺旋桨这一动力装置,运用浆叶向后排水来达到前进的目的,这样在运转时具有非常大的噪声,对水底环境扰动较大;同时,由于水的巨大阻力,螺旋桨无法立即高速旋转使机器人获得爆发力,动力响应较慢。
3、基于上述技术缺陷,申请人采用仿生学原理设计了一种基于鞭毛的水下仿生推进装置。
技术实现思路
1、本发明的目的是提供一种基于鞭毛的水下仿生推进装置,该装置解决了背景技术中提到的技术问题。
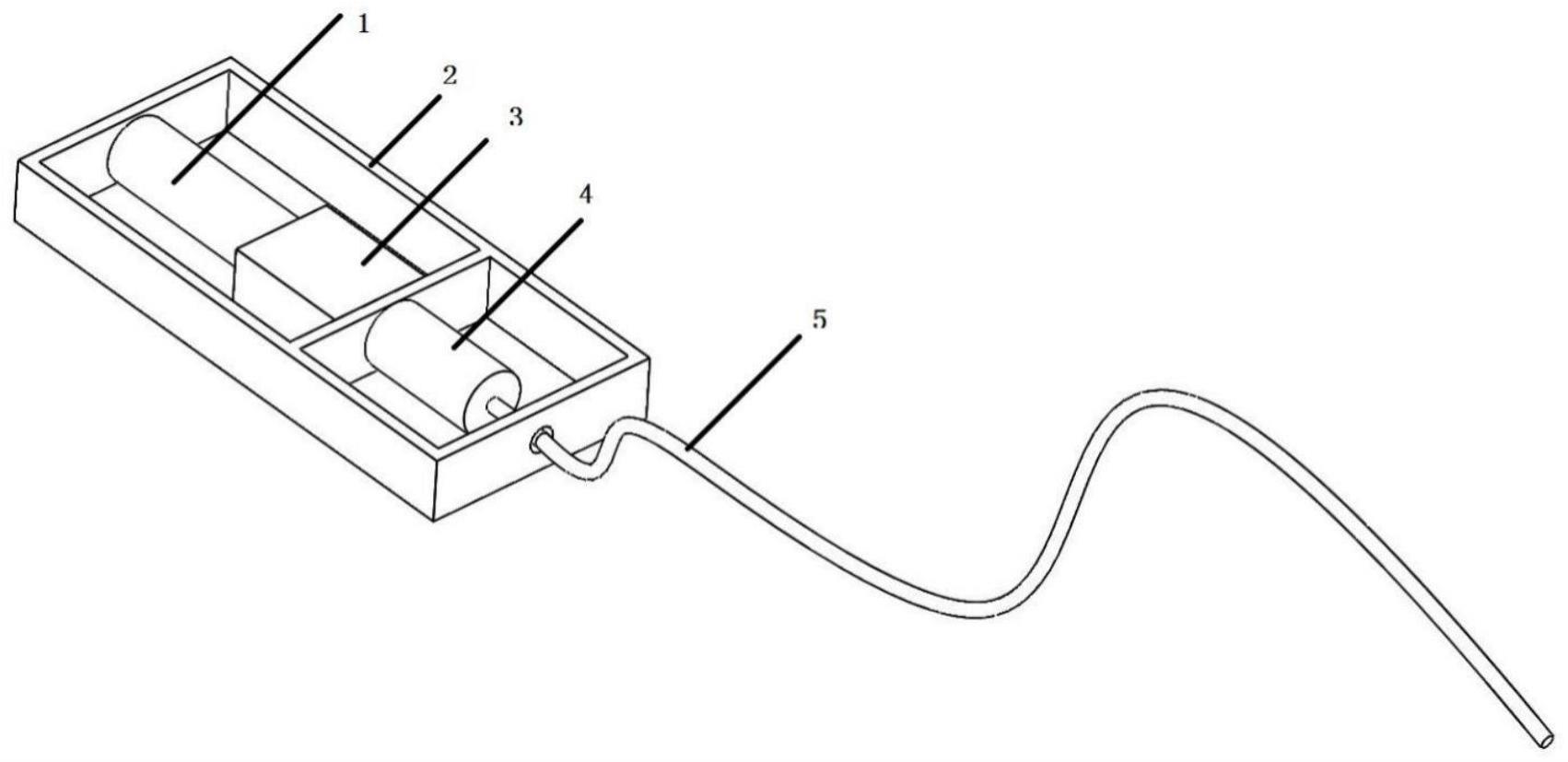
2、本发明的上述技术目的是通过以下技术方案得以实现的:一种基于鞭毛的水下仿生推进装置,包括支撑机构,所述支撑机构内设有控制机构和水下电机;所述控制机构与水下电机电性连接,所述水下电机的输出端穿过支撑机构,且所述水下电机输出端设有仿生鞭毛。
3、进一步的,所述控制机构包括防水电池和电调及控制器,所述防水电池、电调及控制器和水下电机之间电性连接。
4、综上所述,本发明具有以下有益效果:
5、1、采用仿生鞭毛结构,能够增强空化噪声抑制、尾流抑制和高精度推进力控制;
6、2、采用仿生鞭毛可起到稳定航向的作用,使得航行器在水下运动更加灵活稳定;
7、3、采用仿生鞭毛结构,可以实现航行器运动方向的控制。
技术特征:
1.一种基于鞭毛的水下仿生推进装置,其特征是:包括支撑机构(2),所述支撑机构(2)内设有控制机构和水下电机(4);所述控制机构与水下电机(4)电性连接,所述水下电机(4)的输出端穿过支撑机构(2),且所述水下电机(4)输出端设有仿生鞭毛。
2.根据权利要求1所述的一种基于鞭毛的水下仿生推进装置,其特征是:所述控制机构包括防水电池(1)和电调及控制器(3),所述防水电池(1)、电调及控制器(3)和水下电机(4)之间电性连接。
技术总结
本发明公开了一种基于鞭毛的水下仿生推进装置,涉及水下动力推进技术领域,其技术方案要点是:包括支撑机构,所述支撑机构内设有控制机构和水下电机;所述控制机构与水下电机电性连接,所述水下电机的输出端穿过支撑机构,且所述水下电机输出端设有仿生鞭毛。该推进装置采用了仿生鞭毛结构,代替现有的螺旋桨结构,在空化噪声抑制、尾流抑制、高精度推进力控制等方面产生有益的效果;同时,该装置可起到稳定航向的作用,使得航行器在水下运动更加灵活、稳定;此外,本装置利用仿生鞭毛结构,也可以实现航行器运动方向的控制,具有常规螺旋桨所不具备的诸多技术优势。
技术研发人员:张代贤
受保护的技术使用者:中国空气动力研究与发展中心空天技术研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!