一种水下清洗高速刷盘装置及水下机器人的制作方法
本发明涉及清洁设备,具体涉及一种水下清洗高速刷盘装置及水下机器人。
背景技术:
1、当船舶在海上航行时,船底会附着各种藤壶、贻贝、海蛎子、藻类和其他生物。附着在船底的生物会增加船舶航行的阻力,需要耗费更多燃料维持速度,增加了碳排放量,同时,附着在船底的生物也会腐蚀船体表面的涂层,降低船舶的使用寿命,而且附着的生物随着船舶全球航行,会给不同海域造成生物入侵,破坏当地所在海域的生物多样性。
2、对于船体、岸壁、水下基础设施等表面的清洗维护,以往主要采用潜水员人工清洗。但人工清洗方式工人的劳动强度大,工作条件差,可持续作业时间短、安全性差、尤其是施工质量难以保证,效率也难以提高。为了克服人工水下清洗作业的种种弊端,以及行业对人工智能技术的引进发展,水下机器人代替人工进行清洗作业已成为行业趋势。目前常见的无人水下清洗作业多采用水下机器人配置刷盘进行水下清洗作业。现有水下机器人的刷盘结构在清理海蛎子等外壳坚硬的附着生物时,刷盘的清理力度太小,附着在船底顽固的海蛎子等生物难以清理干净,往往需要操作人员控制水下机器人对顽固处进行反复处理,反复清理不仅增大了水下机器人的耗能,而且还降低了水下机器人的清理效率,延长工作时间,清理效果不明显。
技术实现思路
1、为解决现有技术存在的不足,本发明提供了一种水下清洗高速刷盘装置及水下机器人。
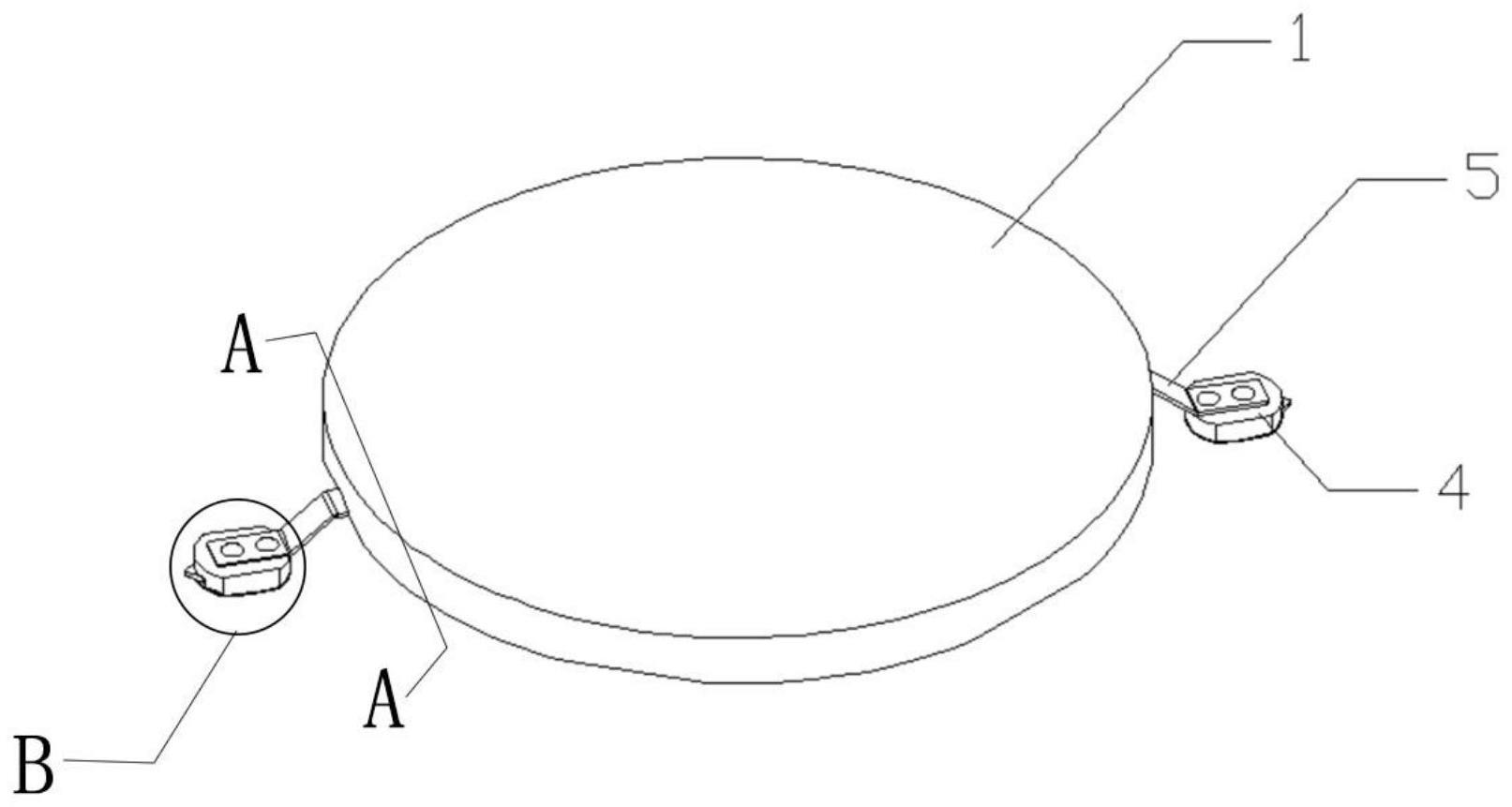
2、为实现上述目的,本发明的技术方案为:一种水下清洗高速刷盘装置,包括转盘,所述转盘外侧均匀可拆卸连接有若干个压头,所述压头下方设置有减磨块,所述转盘底部均匀设置有若干组刷丝,所述转盘底部靠近所述转盘圆心处设置有若干个尼龙块。
3、进一步地,所述转盘外侧设置有若干个凸形槽,所述尼龙块上方连接有第一凸形块,所述刷丝上方连接有第二凸形块,所述凸形槽与第一凸形块和第二凸形块的尺寸相匹配,所述凸形槽靠近转盘圆心处设置有第一凸形块,所述第一凸形块外侧设置有第二凸形块。
4、进一步地,所述第二凸形块远离转盘圆心一端的下方设置有弹簧连接片,所述弹簧连接片的另一端连接有所述压头。
5、进一步地,所述压头的水平高度低于所述转盘的水平高度。
6、进一步地,所述压头上设置有刀头,所述刀头设置在所述弹簧连接片的延长线上,所述刀头远离所述转盘。
7、进一步地,所述弹簧连接片两端分别通过连接螺栓连接到所述第二凸形块和压头上。
8、进一步地,所述减磨块底部为球面弧形结构。
9、进一步地,所述刷丝为硬性钢丝和/或柔性尼龙丝。
10、一种水下机器人,包括机器人本体和水下清洗高速刷盘装置,所述水下清洗高速刷盘装置设置于所述机器人本体上。
11、本发明所达到的有益效果为:
12、1、本发明在马达的控制下可以进行高速旋转,在压头和压头上的刀头的作用下,可以快速地将附着在船底顽固的海蛎子等生物清理干净,清理效率高,节约了船底清理时间,清理效果明显。
13、2、本发明中刷丝固定设置在第二凸形块上,尼龙块上方固定设置有第一凸形块,第一凸形块和第二凸形块可以快速插入转盘外侧的凸形槽内,第二凸形块挤压住第一凸形块,加快了尼龙块和刷丝的拆卸更换速度,提高了刷盘的清洁效率。
14、3、本发明转盘底部设置有若干个尼龙块,压头底部设置有减磨块,尼龙块和减磨块起到限位作用,防止转盘底部和压头直接与船体接触,损坏船体表面的船漆。
15、4、本发明在转盘转动时,压头随转盘一同进行圆周运动的时候,压头上下表面行程不同,导致压头上下表面水的流速不同,刷盘内的压力小于刷盘外侧的压力,刷盘在压力的作用下与船体表面接触,同时内外两侧的压力差能够克服压头所受的离心力。
16、5、本发明在压头的外侧设置有刀头,刀头可以提前将附着在船体底部的硬性附着物进行清除,保证了后续压头清理附着物的效果,提升了船底附着物的清理效果。
17、6、本发明在清理船底附着物遇到焊缝时,压头底部的减磨块与船体焊缝先接触,减磨块底部为球面弧形结构,减磨块靠近焊缝时会自动进行爬升,避免了压头上的刀头与焊缝接触而损坏焊缝上的船漆。
技术特征:
1.一种水下清洗高速刷盘装置,其特征在于:包括转盘(1),所述转盘(1)外侧均匀可拆卸连接有若干个压头(4),所述压头(4)下方设置有减磨块(41),所述转盘(1)底部均匀设置有若干组刷丝(3),所述转盘(1)底部靠近所述转盘(1)圆心处设置有若干个尼龙块(2)。
2.根据权利要求1所述的一种水下清洗高速刷盘装置,其特征在于:所述转盘(1)外侧设置有若干个凸形槽,所述尼龙块(2)上方连接有第一凸形块,所述刷丝(3)上方连接有第二凸形块(31),所述凸形槽与第一凸形块和第二凸形块(31)的尺寸相匹配,所述凸形槽靠近转盘(1)圆心处设置有第一凸形块,所述第一凸形块外侧设置有第二凸形块(31)。
3.根据权利要求2所述的一种水下清洗高速刷盘装置,其特征在于:所述第二凸形块(31)远离转盘(1)圆心一端的下方设置有弹簧连接片(5),所述弹簧连接片(5)的另一端连接有所述压头(4)。
4.根据权利要求3所述的一种水下清洗高速刷盘装置,其特征在于:所述压头(4)的水平高度低于所述转盘(1)的水平高度。
5.根据权利要求3所述的一种水下清洗高速刷盘装置,其特征在于:所述压头(4)上设置有刀头(42),所述刀头(42)设置在所述弹簧连接片(5)的延长线上,所述刀头(42)远离所述转盘(1)。
6.根据权利要求3所述的一种水下清洗高速刷盘装置,其特征在于:所述弹簧连接片(5)两端分别通过连接螺栓(43)连接到所述第二凸形块(31)和压头(4)上。
7.根据权利要求1所述的一种水下清洗高速刷盘装置,其特征在于:所述减磨块(41)底部为球面弧形结构。
8.根据权利要求1所述的一种水下清洗高速刷盘装置,其特征在于:所述刷丝(3)为硬性钢丝和/或柔性尼龙丝。
9.一种水下机器人,其特征在于:包括机器人本体和权利要求1-8任一项所述的水下清洗高速刷盘装置,所述水下清洗高速刷盘装置设置于所述机器人本体上。
技术总结
本发明涉及清洁设备技术领域,具体涉及一种水下清洗高速刷盘装置及水下机器人,包括转盘,所述转盘外侧均匀连接有若干个压头,所述压头下方设置有减磨块,转盘底部均匀设置有若干组刷丝,所述转盘底部靠近所述转盘圆心处设置有若干个尼龙块。本发明在马达的控制下可以进行高速旋转,在压头和压头上的刀头的作用下,可以快速地将附着在船底顽固的海蛎子等生物清理干净,清理效率高,节约了船底清理时间,清理效果明显,在清理船底附着物遇到焊缝时,压头底部的减磨块与船体焊缝先接触,减磨块底部为球面弧形结构,减磨块会随着焊缝的高低而上下变换位置,减磨块同时带动上方的压头上下移动,避免了压头与焊缝接触而损坏焊缝上的船漆。
技术研发人员:刘羽菁,齐思晨,孙雪冬
受保护的技术使用者:飞马滨(青岛)智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!