一种自持式低功耗长续航的无人潜航器
本申请涉及无人潜航器的,尤其涉及一种自持式低功耗长续航的无人潜航器。
背景技术:
1、无人潜航器(uuv)作为无人平台中的重要一员,随着海洋在经济与军事领域战略地位和作用日益加强,外加其使用的便捷性、执行危险任务的能力和潜在的应用前景,已成为各海洋大国和军事强国争相研制的热门无人平台。无人潜航器目前已应用于情报侦察、反潜反雷、海洋调查、海底地形测量、海洋水文监测等军民领域。其中,美国、俄罗斯、欧洲和日本等发达国家已将uuv作为重点发展的海洋观测载体和作战武器,且成立了专门的研究所和高效实验室,如美国麻省理工学院的自主水下机器人实验室、美国海军研究生院智能水下运载器研究中心、日本东京大学机器人应用实验室、英国海事技术中心等。
2、无人潜航器具有造价低廉、使用灵活、隐蔽性强、适应复杂海况以及有效避免人员伤亡的特点,作为一种海上力量倍增器有着广泛的军事用途。无人潜航器通常由潜艇、水面舰艇或民船搭载布放,分为遥控型和自主型,其中完全自主无人潜航器是未来发展的趋势。无人潜航器利用自身搭载的各种传感器和武器,能够执行远程通信中继、侦察监视、反潜警戒、反水雷等任务。
3、无人潜航器具有以下优势:1)体积小,侧方和正面的截面积非常小,主动声呐难以探测。2)自噪声小,声隐蔽性好,被动声呐难以侦听。随着人工智能、水下通信等技术发展,无人潜航器的智能化程度将不断提高,能够与环境发生交互作用,执行任务时能有效地探测和识别水下目标、取样或完成各种人力无法胜任的复杂工作。但是,目前大部分无人潜航器是以电池为动力来源,而现阶段电池的能量密度无法支撑无人潜航器长时间远距离航行。多数无人潜航器只能以4到5节甚至更低的速度航行,必须在电力耗尽前返回到就近港口或海上船舰充电,因此执行任务范围受限,而且增加被敌搜获的机率。
4、扑翼振荡现象广泛存在于自然界中,如鸟类,昆虫,鱼类以及鲸和海豚等海洋生物利用其翅膀或鳍的扑翼振荡产生升力和推力以实现运动。其中昆虫是最早进化出主动飞行能力的生物,在机动性方面至今仍然未被其他生物或人造飞行器超越。理论研究表明,扑翼推进效率显著高于常规推进系统,最高可达85%,这种推进方式展现出了优秀的空气动力和水动力性能。由于具有显著的性能优势和广泛的应用前景,仿扑翼机器人成为了新型水下机器人的研究热点。扑翼推进的优秀的水动力学性能启发了研究人员模仿扑翼的沉浮俯仰运动采集流体的能量。经过20多年发展,扑翼能量采集的效率从28%提高到了40%,扑翼的运动模式也从当初的主动运动发展成全被动运动。事实上,大型鸟类往往在飞行过程中同时运用了扑翼推进和能量采集。大型鸟类给无人潜航器设计的启示在于,采用滑翔姿势完成大部分的推进过程。这是因为滑翔过程中有效攻角小、阻力低,是一种低损耗推进方式,较小的高度差即可实现较大距离的推进,并且滑翔所消耗的重力势能可转化自上海洋水流的动能。
5、本发明提出了一种新型的无人潜航器,这种无人潜航器既能像大型鸟类那样在推进的过程中利用周围流体的的动能进行低功耗甚至无功耗的动态滑翔;同时也能依靠自身能量,通过改变重力/浮力进行沉浮运动,主动制造高度差进行低功耗的滑翔运动。这种无人潜航器在民用领域,可以解决海洋水文信息实时采集的问题,海洋水文信息采集是海洋能资源评估、气候变化等研究的基础条件,此外,低功耗远航无人潜航器还可应用于地质测绘、资源勘测、环境监控等领域;在军事领域,低功耗长续航无人潜航器可执行情报、监视、侦察(isr)等任务,长续航无人潜航器可拓展其执行任务的持续时间和覆盖范围。
技术实现思路
1、有鉴于此,本申请提供一种自持式低功耗长续航的无人潜航器,可利用扑翼动态滑翔实现低功耗、远距离巡航。
2、本申请提供一种自持式低功耗长续航的无人潜航器,包括:
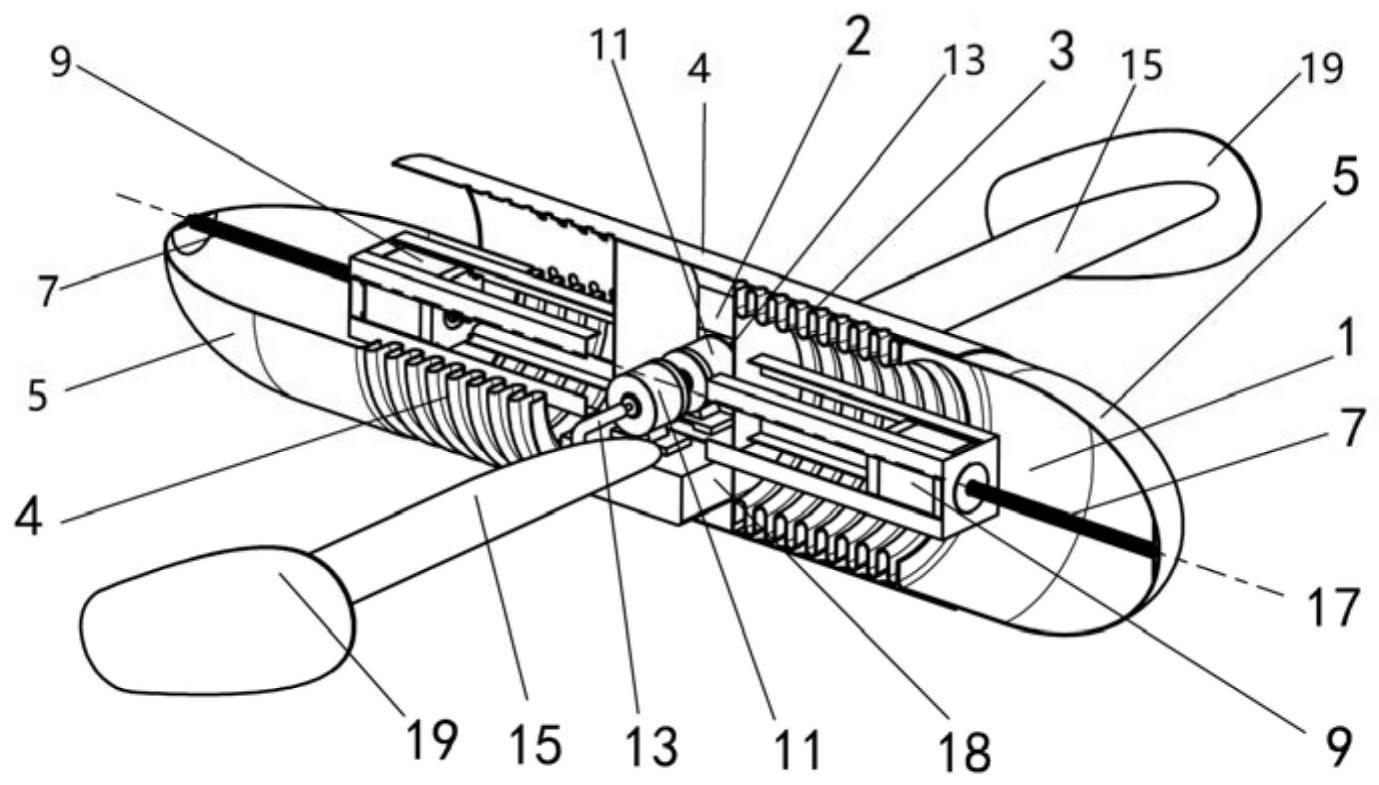
3、活动罩,各直线活动地安装于固定外壳的前后二端,以与所述固定外壳围成变形密封腔;
4、直线驱动机构,分别用以驱动所述活动罩的直线活动,以使变形密封腔的体积改变,形成下沉或上浮的驱动力;
5、扑翼,各从所述固定外壳所围固定密封腔的二侧向伸出;
6、摆动驱动机构,用以驱动所述扑翼摆动以使扑翼的攻角发生改变,进而形成前进或后退的驱动力。
7、可选地,所述直线驱动机构包括步进电机和螺杆组件,所述螺杆组件分别固接所述活动罩和步进电机,所述螺杆组件用以在步进电机的旋转动力输入下产生直线动力。
8、可选地,所述活动罩通过膨胀节固装在所述固定外壳上。
9、可选地,所述活动罩的外表面被配置成流线形。
10、可选地,所述摆动驱动机构包括驱动电机和曲轴,所述曲轴分别固接所述驱动电机和扑翼。
11、可选地,所述驱动电机与曲轴的连接处采用绝缘机油密封,所述驱动电机、曲轴被分隔在不同的密封腔内。
12、可选地,所述扑翼的端部固设有翼端板。
13、可选地,还包括电连接的蓄电池和发电机构,所述发电机构用以在受水流驱动扑翼的机械能转化成电能,所述蓄电池用以储存所述电能。
14、可选地,所述蓄电池位于固定密封腔的底部。
15、相对于现有技术,本申请具有如下有益效果:
16、1、潜航器利用水下滑翔前进,水下滑翔过程中有效攻角小、阻力低,是一种低能耗推进方式,较小的高度差即可实现较大的推进距离。潜航器在下沉和上浮过程中分别利用重力势能和浮力势能推进,实现了不间断的水下滑翔推进。
17、2、本申请利用膨胀节模仿鱼类通过改变自身的体积来进行沉浮运动。潜航器与外界不存在质量的交换,自身重力基本不变,降低了潜航器漏水的可能性。并且膨胀节本身具有弹性,可以储存外界流体的压缩能,减小自身的能量消耗。
18、3、潜航器利用扑翼不同的位置和攻角实现了沉浮过程中的前后机动,具有更大的灵活性。
19、4、潜航器仅仅在电动机工作时消耗电源的电能,在滑翔过程中大部分时间不消耗能量,而电源的电能可来自于环境水流的流体能,潜航器通过利用水流的流体能实现超长续航。
技术特征:
1.一种自持式低功耗长续航的无人潜航器,其特征在于,包括:
2.根据权利要求1所述自持式低功耗长续航的无人潜航器,其特征在于,所述直线驱动机构包括步进电机和螺杆组件,所述螺杆组件分别固接所述活动罩和步进电机,所述螺杆组件用以在步进电机的旋转动力输入下产生直线动力。
3.根据权利要求1所述自持式低功耗长续航的无人潜航器,其特征在于,所述活动罩通过膨胀节固装在所述固定外壳上。
4.根据权利要求1所述自持式低功耗长续航的无人潜航器,其特征在于,所述活动罩的外表面被配置成流线形。
5.根据权利要求1所述自持式低功耗长续航的无人潜航器,其特征在于,所述摆动驱动机构包括驱动电机和曲轴,所述曲轴分别固接所述驱动电机和扑翼。
6.根据权利要求5所述自持式低功耗长续航的无人潜航器,其特征在于,所述驱动电机与曲轴的连接处采用绝缘机油密封,所述驱动电机、曲轴被分隔在不同的密封腔内。
7.根据权利要求1所述自持式低功耗长续航的无人潜航器,其特征在于,所述扑翼的端部固设有翼端板。
8.根据权利要求1所述自持式低功耗长续航的无人潜航器,其特征在于,还包括电连接的蓄电池和发电机构,所述发电机构用以在受水流驱动扑翼的机械能转化成电能,所述蓄电池用以储存所述电能。
9.根据权利要求7所述自持式低功耗长续航的无人潜航器,其特征在于,所述蓄电池位于固定密封腔的底部。
技术总结
本申请公开了一种自持式低功耗长续航的无人潜航器。本技术方案中,潜航器利用水下滑翔前进,水下滑翔过程中有效攻角小、阻力低,是一种低能耗推进方式,较小的高度差即可实现较大的推进距离。潜航器与外界不存在质量的交换,自身重力基本不变,降低了潜航器漏水的可能性。并且膨胀节本身具有弹性,可以储存外界流体的压缩能,减小自身的能量消耗。潜航器利用扑翼不同的位置和攻角实现了沉浮过程中的前后机动,具有更大的灵活性。潜航器仅仅在电动机工作时消耗电源的电能,在滑翔过程中大部分时间不消耗能量,而电源的电能可来自于环境水流的流体能,潜航器通过利用水流的流体能实现超长续航。
技术研发人员:姜伟,谢诞梅,侯佑民
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!