汽车运输船自动装卸系统以及装车、卸车方法与流程
本申请涉及船舶装卸货的,尤其涉及一种汽车运输船自动装卸系统以及装车、卸车方法。
背景技术:
1、汽车运输船主要运输车辆,如小轿车、卡车等,该船舶配备多层车辆甲板,车辆停靠并绑扎在甲板上。现有的汽车运输船装车时,船舶停靠在码头,专业司机将汽车开到船上,停在甲板停车位上;卸车时,专业司机再将汽车从船上开下到码头。依靠人工装卸汽车,需要在出发港口、到达港口各长期配备多名专业装卸车司机,人工成本高;人工装卸车辆速度慢,占用港口时间长、费用高。
技术实现思路
1、本发明实施例的目的在于:提供一种汽车运输船自动装卸系统以及装车、卸车方法,其能够解决现有技术中存在的上述问题。
2、为达上述目的,本申请采用以下技术方案:
3、一方面,提供一种汽车运输船自动装卸系统,包括:
4、agv泊车机器人,用于自动将汽车从地面转运到汽车运输船上或将汽车从所述汽车运输船上转运到地面;
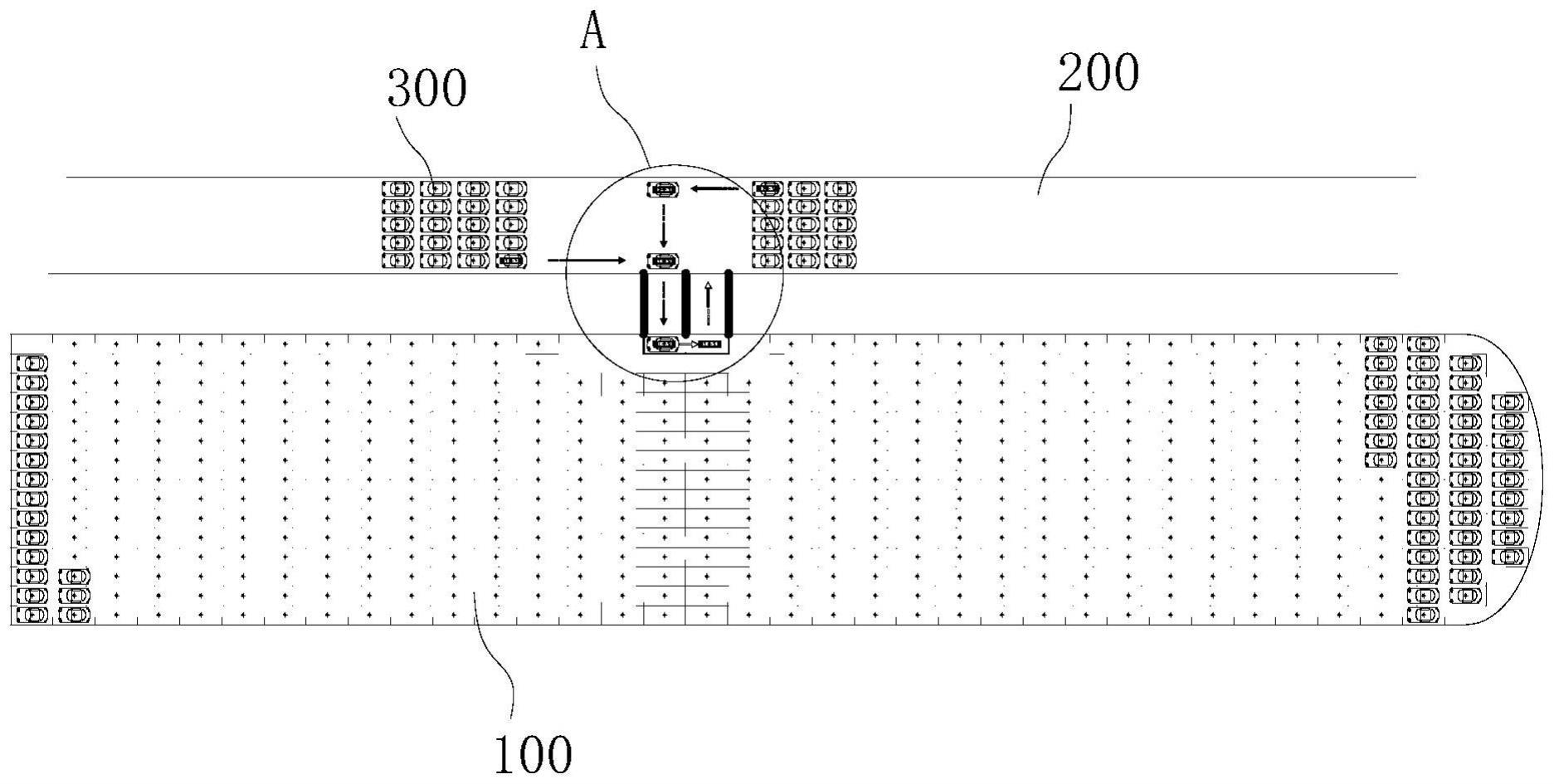
5、升降梯,设置于所述汽车运输船上,包括上升通道、下降通道、载物板和横推机构,所述上升通道内设有设有用于推动所述载物板向上升起的上升驱动机构,所述下降通道内设有用于带动所述载物板向下降落的下降驱动机构,所述上升通道的最顶层设置有用于将所述载物板从所述上升通道横向推向所述下降通道内的所述横推机构,所述下降通道的最底层设置有用于将所述载物板从所述下降通道推向所述上升通道内的所述横推机构,从而实现通过所述升降梯带动所述agv泊车机器人转运于所述汽车运输船的各层甲板之间。
6、可选的,所述升降梯设置于所述汽车运输船的舷侧,所述汽车运输船上对应所述升降梯的位置设置有舷侧跳板。
7、可选的,所述上升通道以及所述下降通道的停靠层级数量与所述汽车运输船的装车甲板层级数量对应,所述上升通道以及所述下降通道内安装的所述载物板均比所述装车甲板层级数量少一。
8、可选的,所述上升驱动机构包括设置于所述上升通道的两侧的上升输送带,所述上升输送带上间隔设置有用于搭载所述载物板的上升托板,两侧的所述上升托板分别承托所述载物板,通过所述上升输送带的运转,实现带动所述载物板向上升起。
9、可选的,所述下降驱动机构包括设置于所述下降通道的两侧的下降输送带,所述下降输送带上间隔设置有用于搭载所述载物板的下降托板,两侧的所述下降托板分别承托所述载物板,通过所述下降输送带的运转,实现带动所述载物板向下降落。
10、可选的,所述上升托板和所述下降托板上分别设置有滑槽,所述载物板的底部设置有与所述滑槽对应的滑轨,通过所述滑槽与所述滑轨的配合实现所述载物板的滑动安装,进而实现所述横推机构将所述载物板推动于所述上升通道和所述下降通道之间。
11、另一方面,提供一种基于上述的汽车运输船自动装卸系统的装车方法,包括步骤:
12、a1.agv泊车机器人将地面的汽车转运至汽车运输船的转运层级甲板上,再将汽车转运至升降梯中的空载物板上;
13、a2.升降梯带动装载有汽车的agv泊车机器人上升或下降至预定停放该汽车的层级甲板上;
14、a3.agv泊车机器人将汽车运转至甲板上的预定泊车点并自动泊车;
15、a4.甲板上的空agv泊车机器人返回至升降梯中的空载物板上;
16、a5.升降梯带动空agv泊车机器人下降或上升至转运层级甲板上;
17、a6.空agv泊车机器人自动回到地面装载下一辆汽车。
18、可选的,从最底层开始,自下而上,每装满一层甲板,再进行上一层甲板的装车。
19、再一方面,提供一种基于上述的汽车运输船自动装卸系统的卸车方法,包括步骤:
20、b1.agv泊车机器人将甲板上的汽车转运至升降梯中的空载物板上;
21、b2.升降梯带动装载有汽车的agv泊车机器人上升或下降至转运层级甲板上;
22、b3.agv泊车机器人将汽车运转至地面的预定泊车点并自动泊车;
23、b4.地面的空agv泊车机器人返回至升降梯中的空载物板上;
24、b5.升降梯带动空agv泊车机器人下降或上升至预定卸车的层级甲板上;
25、b6.空agv泊车机器人自动回到预定卸车的层级甲板上装载下一辆汽车。
26、可选的,从最顶层开始,自上而下,每卸完一层甲板上的汽车,再进行下一层甲板的卸车。
27、本申请的有益效果为:本发明提供一种汽车运输船自动装卸系统以及装车、卸车方法,在汽车运输船上设置有升降梯,同时利用agv泊车机器人进行自动转运汽车和泊车,在装卸汽车时,agv泊车机器人可以自动托起汽车进行转运,无需人工开车,同时利用升降梯可以快速地将agv泊车机器人和汽车于各层甲板之间转运,实现汽车快速装卸的目的。综上,基于本方案的系统和装车、卸车方法,可以实现无人化自动装卸车,降低人工成本,同时可提高装卸车效率,减少占用港口的时间和费用。
技术特征:
1.一种汽车运输船自动装卸系统,其特征在于,包括:
2.根据权利要求1所述的汽车运输船自动装卸系统,其特征在于,所述升降梯(1)设置于所述汽车运输船(100)的舷侧,所述汽车运输船(100)上对应所述升降梯(1)的位置设置有舷侧跳板(3)。
3.根据权利要求1所述的汽车运输船自动装卸系统,其特征在于,所述上升通道(11)以及所述下降通道(12)的停靠层级数量与所述汽车运输船(100)的装车甲板层级数量对应,所述上升通道(11)以及所述下降通道(12)内安装的所述载物板(13)均比所述装车甲板层级数量少一。
4.根据权利要求3所述的汽车运输船自动装卸系统,其特征在于,所述上升驱动机构包括设置于所述上升通道(11)的两侧的上升输送带(111),所述上升输送带(111)上间隔设置有用于搭载所述载物板(13)的上升托板(112),两侧的所述上升托板(112)分别承托所述载物板(13),通过所述上升输送带(111)的运转,实现带动所述载物板(13)向上升起。
5.根据权利要求4所述的汽车运输船自动装卸系统,其特征在于,所述下降驱动机构包括设置于所述下降通道(12)的两侧的下降输送带,所述下降输送带上间隔设置有用于搭载所述载物板(13)的下降托板,两侧的所述下降托板分别承托所述载物板(13),通过所述下降输送带的运转,实现带动所述载物板(13)向下降落。
6.根据权利要求5所述的汽车运输船自动装卸系统,其特征在于,所述上升托板(112)和所述下降托板上分别设置有滑槽,所述载物板(13)的底部设置有与所述滑槽对应的滑轨,通过所述滑槽与所述滑轨的配合实现所述载物板(13)的滑动安装,进而实现所述横推机构将所述载物板(13)推动于所述上升通道(11)和所述下降通道(12)之间。
7.一种基于权利要求1-6任一所述的汽车运输船自动装卸系统的装车方法,其特征在于,包括步骤:
8.根据权利要求7所述的装车方法,其特征在于,从最底层开始,自下而上,每装满一层甲板,再进行上一层甲板的装车。
9.一种基于权利要求1-6任一所述的汽车运输船自动装卸系统的卸车方法,其特征在于,包括步骤:
10.根据权利要求9所述的卸车方法,其特征在于,从最顶层开始,自上而下,每卸完一层甲板上的汽车,再进行下一层甲板的卸车。
技术总结
本申请提供一种汽车运输船自动装卸系统以及装车、卸车方法,该系统包括:AGV泊车机器人,用于自动将汽车从地面转运到汽车运输船上或将汽车从汽车运输船上转运到地面;升降梯,包括上升通道、下降通道、载物板和横推机构,上升通道内设有设有用于推动载物板向上升起的上升驱动机构,下降通道内设有用于带动载物板向下降落的下降驱动机构,上升通道的最顶层设置有用于将载物板从上升通道横向推向下降通道内的横推机构,下降通道的最底层设置有用于将载物板从下降通道推向上升通道内的横推机构,从而实现通过升降梯带动AGV泊车机器人转运于汽车运输船的各层甲板之间。本方案可以实现无人化自动装卸车,降低人工成本,同时可提高装卸车效率。
技术研发人员:何广勇,黄荆州,高泰宇,蒋波涛
受保护的技术使用者:广船国际有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!