一种基于六连杆结构的柔体仿生机器蝠鲼
本发明属于水下仿生机器人,具体涉及一种基于六连杆结构的柔体仿生机器蝠鲼。
背景技术:
1、受自然界鱼类推进的快速性和高效性启发,仿生鱼类推进技术研究已成为水下推进技术研究的热点,蝠鲼经过近亿年的自然演化,具有独特的形体结构和运动方式,能很好地适应水生环境,其具有流线型的扁平躯体,这种形态不仅有利于游动推进,还有利于下潜滑行,且在运动流场时,能有效借助流体的能量实现高效的滑行运动。
2、蝠鲼这一特性,充分满足长航时、大范围作业的水下推进器的仿生需求。利用仿生蝠鲼鱼运动原理而研制的柔体潜航器,具有高推进效率、高机动性、高稳定性、低环境扰动、低噪声,以及大负载空间、大负载能力、海底软着陆等特点。因此能更好地达到水下航行器的高机动和长续航能力,以期有效解决传统潜航器存在的机动性、隐蔽性较弱,以及续航时间不足等问题。
3、现有仿生装置柔性胸鳍的运动大多仅由刚性胸鳍前缘拍动来带动,无法实现对胸鳍弦向方向柔性部位局部性状的精确控制,装置运动的灵活性受限,真正的柔体胸鳍仿生机构,具有多种运动状态,依靠胸鳍摆动产生推力。
技术实现思路
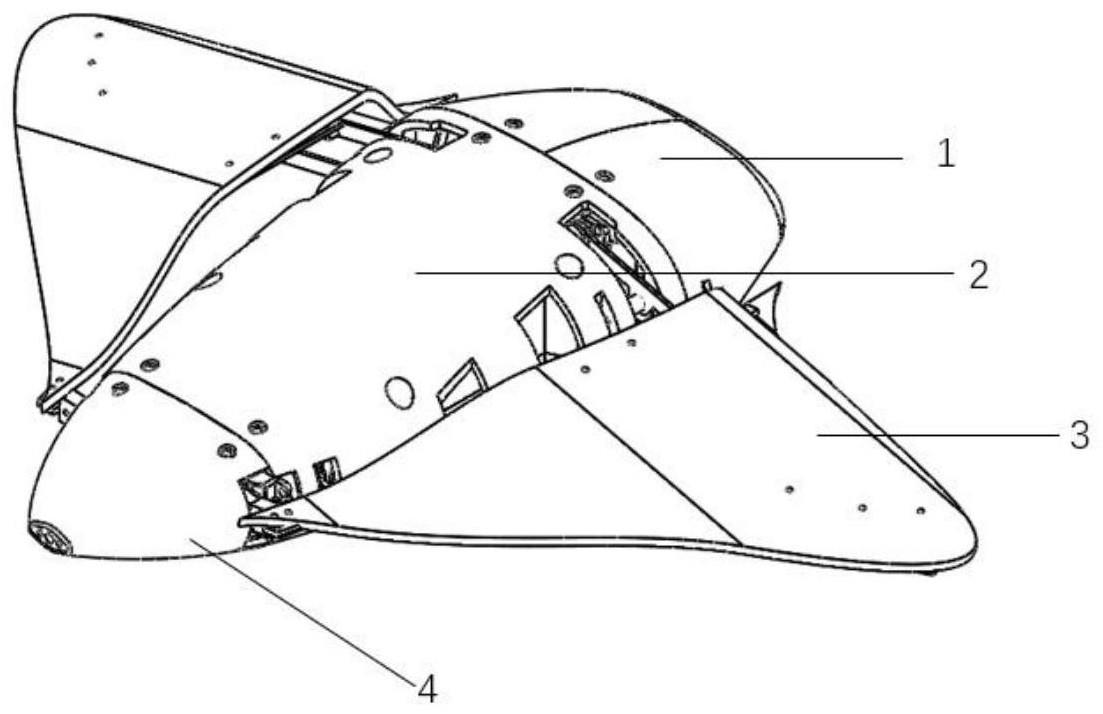
1、为了解决上述存在的问题,本发明提出:一种基于六连杆结构的柔体仿生机器蝠鲼,包括鱼头舱、鱼身舱、中心控制装置、驱动装置、胸鳍、鱼尾舱,所述鱼头舱固定连接于鱼身舱前端,胸鳍通过随动装置可活动设置于鱼身舱两旁,鱼尾舱通过连接部件固定连接于鱼身舱后端,中心控制装置设置在鱼身舱内部,中心控制装置通过驱动装置与胸鳍连接。
2、本发明的有益效果为:
3、本发明的一种基于六连杆结构的柔体仿生机器蝠鲼,采用弦波式运动方式,可以很大程度的还原蝠鲼运动时的生物特性,仿生度达到80%,运动过程流畅。
4、在鱼身外壳设计及材料选型上,选择使用pla3d打印来更好的表现鱼身的流线型,减小在水中运动的阻力,并巧用硅胶发泡条和榫卯结构等实现鱼身内的防水密封。
5、使用双舵机控制鱼翼前侧的摆动、双舵机实现鱼翼后侧的跟随摆动,双舵机的独立控制,也可实现鱼身的转向、上升、前进等x、y、z三轴全向移动功能。
6、内部空腔体积大,可配置多种传感器,对复杂的水下环境适用性高,且具有较高的科研价值。
技术特征:
1.一种基于六连杆结构的柔体仿生机器蝠鲼,其特征在于,包括鱼头舱(1)、鱼身舱(2)、中心控制装置(19)、驱动装置、胸鳍(3)、鱼尾舱(4),所述鱼头舱(1)固定连接于鱼身舱(2)前端,胸鳍(3)通过随动装置可活动设置于鱼身舱(2)两旁,鱼尾舱(4)通过连接部件(23)固定连接于鱼身舱(2)后端,中心控制装置(19)设置在鱼身舱(2)内部,中心控制装置(19)通过驱动装置与胸鳍(3)连接。
2.如权利要求1所述的基于六连杆结构的柔体仿生机器蝠鲼,其特征在于,所述鱼身舱(2)两侧的胸鳍(3)中均设置随动骨架装置,随动骨架装置呈左右对称可活动连接于鱼头舱(1),鱼头舱(1)内固定设置深度相机装置(6)和数字温度传感器,深度相机装置、数字温度传感器和中心控制装置(19)相连,鱼头舱(1)内设置两个第一舵机(15),两个所述第一舵机(15)分别连接鱼身舱(2)两侧的胸鳍(3)以驱动胸鳍(3)本体绕鱼身舱(2)大体在竖直方向进行轴线运动。
3.如权利要求2所述的基于六连杆结构的柔体仿生机器蝠鲼,其特征在于,所述第一舵机(15)固定在小型板材(5)上,第一舵机(15)的控制端与中心控制装置(19)信号连接。
4.如权利要求3所述的基于六连杆结构的柔体仿生机器蝠鲼,其特征在于,所述随动骨架装置包括舵机盘(7)、第一连杆(8)、第二连杆(9)、第三连杆(10)、长方形连接件(11)、三角形杆(12)、第一胸鳍柔体板材(16)、第二胸鳍柔体板材(17),第一舵机(15)与舵机盘(7)相连,舵机盘(7)通过第一连杆(8)分别与第二连杆(9)、第三连杆(10)相连,第二连杆(9)、第三连杆(10)分别与三角形杆(12)相连,第二连杆(9)上设置长方形连接件(11),第二连杆(9)通过长方形连接件(11)分别与第一胸鳍柔体板材(16)、第二胸鳍柔体板材(17)相连。
5.如权利要求4所述的基于六连杆结构的柔体仿生机器蝠鲼,其特征在于,所述第一舵机(15)与舵机盘(7)固定连接,舵机盘(7)与第一连杆(8)固定连接,第一连杆(8)与第二连杆(9)铰接,第一连杆(8)与第三连杆(10)铰接,第二连杆(9)与三角形杆(12)铰接,第三连杆(10)与三角形杆(12)铰接,所述长方形连接件(11)分别与第一胸鳍柔体板材(16)、第二胸鳍柔体板材(17)固定连接。
6.如权利要求5所述的基于六连杆结构的柔体仿生机器蝠鲼,其特征在于,所述鱼身舱(2)包括鱼身上舱和鱼身下舱,所述鱼身上舱和鱼身下舱通过四组螺栓组套件连接,所述鱼身上舱和鱼身下舱均为流线型,鱼身上舱有凸起结构,鱼身下舱有凹槽结构,密封条(18)卡在凸起结构和凹槽结构之间,所述密封条(18)分别设置于鱼身舱(2)前方、后方、左方、右方。
7.如权利要求6所述的基于六连杆结构的柔体仿生机器蝠鲼,其特征在于,所述鱼尾舱(4)内设置两个第二舵机(21)和辅助动力装置,所述鱼身舱(2)两侧的胸鳍(3)中均设置辅助动力装置,所述辅助动力装置包括舵机机械臂(22)和第一机械臂(20),所述两个第二舵机(21)分别连接鱼身舱(2)两侧的胸鳍(3)以驱动胸鳍(3)本体绕鱼身舱(2)大体在竖直方向进行轴线运动,所述第二舵机(21)的控制端与中心控制装置(19)电连接,第二舵机(21)与舵机机械臂(22)相连,舵机机械臂(22)与第一机械臂(20)相连。
8.如权利要求7所述的基于六连杆结构的柔体仿生机器蝠鲼,其特征在于,所述第二舵机(21)与舵机机械臂(22)固定相连,舵机机械臂(22)与第一机械臂(20)固定连接。
9.如权利要求8所述的基于六连杆结构的柔体仿生机器蝠鲼,其特征在于,所述随动装置包括随动件(13)和固定件(14),随动件(13)的一端与鱼头舱(1)铰接,固定件(14)通过螺栓螺母固定在随动件(13)上,固定件(14)与胸鳍(3)相连。
技术总结
一种基于六连杆结构的柔体仿生机器蝠鲼,属于水下仿生机器人技术领域,包括鱼头舱、鱼身舱、中心控制装置、驱动装置、胸鳍、鱼尾舱,所述鱼头舱固定连接于鱼身舱前端,胸鳍通过随动装置可活动设置于鱼身舱两旁,鱼尾舱通过连接部件固定连接于鱼身舱后端,中心控制装置设置在鱼身舱内部,中心控制装置通过驱动装置与胸鳍连接。本发明使用双舵机控制鱼翼前侧的摆动、双舵机实现鱼翼后侧的跟随摆动,双舵机的独立控制,可实现鱼身的转向、上升、前进等X、Y、Z三轴全向移动功能。
技术研发人员:蓝健,冯波情,姜博川,苏铮杰,曾鸿钧,何东辉,李赵华
受保护的技术使用者:大连大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!