一种自升式平台的定位坐墩方法与流程
本发明涉及船舶建造,特别是涉及一种自升式平台的定位坐墩方法。
背景技术:
1、近年来,随着国内海上风电产业的高速发展,海上风电平台建造量也逐年攀升,市场对海上风电平台的需求逐渐增加。
2、船厂现阶段对海上风电平台的常规方法建造,是先建造桩靴,之后桩靴进入船坞搭载主船体结构,1600吨级及以下的风电安装平台,桩靴尺寸、重量一般在300吨以下,建造周期3~4个月,与分段建造周期接近,可以采用常规方法建造。而大型风电安装平台(2000吨级及以上),单个桩靴重量450吨以上,桩靴自身建造周期为6-8个月,按常规平台建造搭载方法,主船体搭载等待桩靴建造完工的时间3-4个月,船东对海上风电平台的建造交船周期一般在14-18个月,采用常规方法建造无法满足交船周期要求。
技术实现思路
1、本发明的目的是:提供一种自升式平台的定位坐墩方法,以解决现有技术中的大型自升式风电安装平台常规方法建造无法满足交船周期要求的问题。
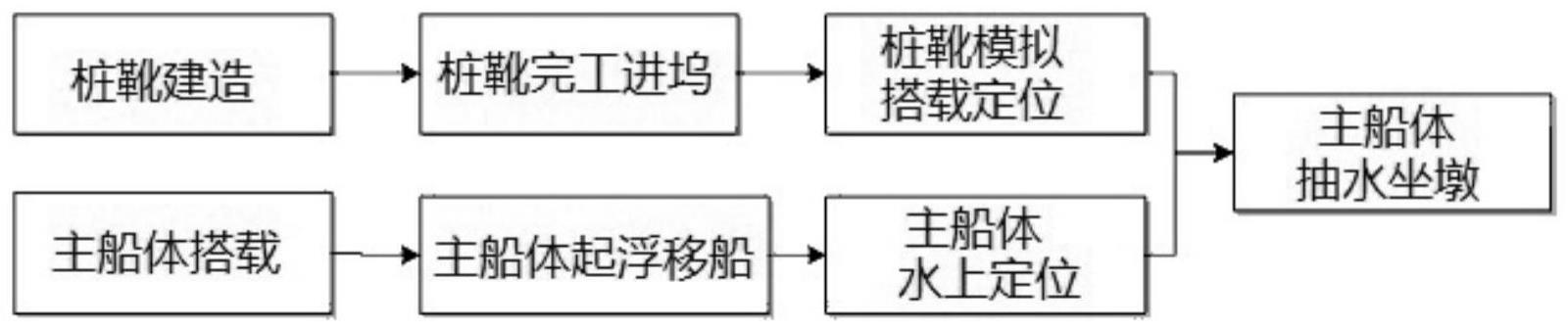
2、为了实现上述目的,本发明提供了一种自升式平台的定位坐墩方法,包括以下步骤:
3、s1,在船坞内进行主船体建造作业,同时在建造平台上同步进行桩靴建造作业,控制主船体的围井分段与桩靴的建造精度,使桩靴与围井分段的理论间隙范围为40~100mm;
4、s2,桩靴以及主船体的围井分段建造完成后,采集桩靴的外轮廓数据、主船体的围井分段的围井中心位置数据,对桩靴和围井分段的外轮廓进行匹配,采用软件模拟桩靴搭载数据,获得桩靴与主船体在搭载时的搭载定位数据;
5、s3,依据s2中的搭载定位数据调整坐墩高度,确定船坞的坞墩布置,桩靴进入船坞并按照搭载定位数据进行摆放;
6、s4,进行起浮计算,主船体进行起浮移船,测量主船体的浮态,进行浮态调整,使主船体起浮之后的横倾不大于0.3度,纵倾不大于船体垂线间长的1%;
7、s5,主船体浮态调平后,船体人员对依据步骤s2中的搭载定位数据对主船体进行水上定位,对船坞进行抽水,使主船体精准坐墩。
8、优选地,步骤s1中,在生产设计时桩靴的结构图不加放收缩补偿量和余量,在平台建造时桩靴的外轮廓按照负公差控制。
9、优选地,步骤s1中,主船体的围井分段加放余量不加放收缩量,按正公差进行精度控制。
10、优选地,步骤s1中,主船体与桩靴建造时,将自升式平台的三维建模数据从设计软件导出,得到桩靴、围井分段的外轮廓的理论数据,桩靴、围井分段建造过程中按模型的理论数据及精度控制数据进行分段装配及完工测量;桩靴、围井分段建造完工后,测量得到实际完工外轮廓的数据,通过完工外轮廓数据与模型理论数据的对比,对桩靴与围井间隙数据模拟分析。
11、优选地,在测量得到桩靴完工外轮廓数据时,测量点包括桩靴的顶板与底板的角点以及折角点、桩靴的基准线划线位置、齿条板的齿根和齿顶位置,在测量得到围井分段完工外轮廓数据时,测量点包括围井分段基准线划线位置、纵向基准线前后3米位置和横向基准线前后0.5米位置。
12、优选地,步骤s2中,通过测量主船体的围井中心位置,对桩靴定位中心位置进行核实,通过桩靴模拟搭载数据,根据桩靴实测数据与理论数据的对比,以主船体的基线为基准调整桩靴高度,与主船体围井进行整体分析,对桩靴实际摆放的前后左右的定位数据进行确定,通过测量仪器对桩靴精准定位,得到桩靴的搭载定位数据。
13、优选地,步骤s3中,调整坐墩高度时,根据桩靴与围井底板理论间隙确定桩靴搭载时围井底板与桩靴顶板的距离;根据施工距离以及桩靴收紧状态下伸出主船体基线的距离,桩靴增加钢质墩的高度,初步确定坐墩高度;根据桩靴完工测量中提供的桩靴顶部高度数据,及围井底板完工高度数据,与理论对比,通过调整底部钢质墩的高度确定坞墩的精度定位。
14、优选地,步骤s4中,主船体起浮前,现场人员对主船体的重量中心进行估算,进行现场状态检查,核对无误后准备主船体起浮工作。
15、优选地,步骤s5中,主船体坐墩控制时预留补偿量,坐墩前在自升式平台的围部平直外板左右两舷及首部平直外板右舷贴上三个光靶,三个光靶的高度位置为甲板边线下看线,并且三个光靶处于同一水平高度,光靶横向贴在船体外板平直区域,尾部两个光靶位置选在船舷两侧的fro处,首部光靶位置选为fr180+100处,并用油性笔画出各光靶轮廓;
16、以坞边数字化船坞测量墩为基准采集数据,将二次坐墩位置在船坞底部的格子线通过全站仪标记在坞墙两侧,高度与三个光靶高度一致,在坞墙形成坞墩投影点作为参考点,且标明测量墩编号;以桩靴在船长方向定位线和船中选取的总段合拢检验线作为共用点。
17、优选地,步骤s5中,主船体坐墩过程中,测量主船体的横倾数据和纵倾数据,以数字化船坞测量墩为基准监测三个光靶的高度值;坐墩过程中测量三个光靶前后、左右值在30mm内,持续监测并在规定高度时对偏差值进行重复测量并报告,无问题方可继续抽水至坐墩。
18、本发明实施例一种自升式平台的定位坐墩方法与现有技术相比,其有益效果在于:在船坞内进行主船体建造的同时在建造平台上同步建造桩靴,通过控制桩靴和主船体的围井分段的建造精度,使桩靴与主船体的围井分段满足桩靴与围井的理论间隙需求,利用软件模拟桩靴搭载数据,获得桩靴的搭载定位数据,主船体在船坞内起浮移船后利用搭载定位数据精准坐墩,缩短主船体与桩靴的公共建造周期,从而提高了大型风电安装平台的建造效率,满足船东的交船周期。
技术特征:
1.一种自升式平台的定位坐墩方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的自升式平台的定位坐墩方法,其特征在于,步骤s1中,在生产设计时桩靴的结构图不加放收缩补偿量和余量,在平台建造时桩靴的外轮廓按照负公差控制。
3.根据权利要求2所述的自升式平台的定位坐墩方法,其特征在于,步骤s1中,主船体的围井分段加放余量不加放收缩量,按正公差进行精度控制。
4.根据权利要求1-3任一项所述的自升式平台的定位坐墩方法,其特征在于,步骤s1中,主船体与桩靴建造时,将自升式平台的三维建模数据从设计软件导出,得到桩靴、围井分段的外轮廓的理论数据,桩靴、围井分段建造过程中按模型的理论数据及精度控制数据进行分段装配及完工测量;桩靴、围井分段建造完工后,测量得到实际完工外轮廓的数据,通过完工外轮廓数据与模型理论数据的对比,对桩靴与围井间隙数据模拟分析。
5.根据权利要求4所述的自升式平台的定位坐墩方法,其特征在于,在测量得到桩靴完工外轮廓数据时,测量点包括桩靴的顶板与底板的角点以及折角点、桩靴的基准线划线位置、齿条板的齿根和齿顶位置,在测量得到围井分段完工外轮廓数据时,测量点包括围井分段基准线划线位置、纵向基准线前后3米位置和横向基准线前后0.5米位置。
6.根据权利要求1-3任一项所述的自升式平台的定位坐墩方法,其特征在于,步骤s2中,通过测量主船体的围井中心位置,对桩靴定位中心位置进行核实,通过桩靴模拟搭载数据,根据桩靴实测数据与理论数据的对比,以主船体的基线为基准调整桩靴高度,与主船体围井进行整体分析,对桩靴实际摆放的前后左右的定位数据进行确定,通过测量仪器对桩靴精准定位,得到桩靴的搭载定位数据。
7.根据权利要求1-3任一项所述的自升式平台的定位坐墩方法,其特征在于,步骤s3中,调整坐墩高度时,根据桩靴与围井底板理论间隙确定桩靴搭载时围井底板与桩靴顶板的距离;根据施工距离以及桩靴收紧状态下伸出主船体基线的距离,桩靴增加钢质墩的高度,初步确定坐墩高度;根据桩靴完工测量中提供的桩靴顶部高度数据,及围井底板完工高度数据,与理论对比,通过调整底部钢质墩的高度确定坞墩的精度定位。
8.根据权利要求1-3任一项所述的自升式平台的定位坐墩方法,其特征在于,步骤s4中,主船体起浮前,现场人员对主船体的重量中心进行估算,进行现场状态检查,核对无误后准备主船体起浮工作。
9.根据权利要求1-3任一项所述的自升式平台的定位坐墩方法,其特征在于,步骤s5中,主船体坐墩控制时预留补偿量,坐墩前在自升式平台的围部平直外板左右两舷及首部平直外板右舷贴上三个光靶,三个光靶的高度位置为甲板边线下看线,并且三个光靶处于同一水平高度,光靶横向贴在船体外板平直区域,尾部两个光靶位置选在船舷两侧的fr0处,首部光靶位置选为fr180+100处,并用油性笔画出各光靶轮廓;
10.根据权利要求9所述的自升式平台的定位坐墩方法,其特征在于,步骤s5中,主船体坐墩过程中,测量主船体的横倾数据和纵倾数据,以数字化船坞测量墩为基准监测三个光靶的高度值;坐墩过程中测量三个光靶前后、左右值在30m m内,持续监测并在规定高度时对偏差值进行重复测量并报告,无问题方可继续抽水至坐墩。
技术总结
本发明涉及船舶建造技术领域,公开了一种自升式平台的定位坐墩方法,包括以下步骤:S1主船体与桩靴建造作业同步进行,控制主船体的围井分段与桩靴的建造精度;S2,采集桩靴的外轮廓数据、主船体的围井分段的围井中心位置数据,采用软件模拟桩靴搭载数据,获得桩靴与主船体在搭载时的搭载定位数据;S3,调整坐墩高度,确定船坞的坞墩布置,桩靴进入船坞并按照搭载定位数据进行摆放;S4,主船体进行起浮移船,进行浮态调整;S5,主船体浮态调平后,船体人员对依据搭载定位数据对主船体进行水上定位,对船坞进行抽水,使主船体精准坐墩。通过同步建造缩短主船体与桩靴的公共建造周期,从而提高了大型风电安装平台的建造效率,满足船东的交船周期。
技术研发人员:杜玺,徐进初,彭秀清
受保护的技术使用者:中船黄埔文冲船舶有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!