一种基于转矩观测器的船舶混合动力智能发电单元协同控制方法
本发明涉及的是一种船舶控制方法,具体地说是船舶混合动力控制方法。
背景技术:
1、目前以柴油机为主的船舶动力系统存在高污染,低能耗,碳排放高的缺点,因此亟需寻求一种低碳高效的动力系统来满足日益严格的减碳需求,适应未来低碳化乃至零碳的目标。
2、氨燃料作为一种清洁燃料,广泛的被应用于化学工业中。氨燃料同时作为一种零碳燃料,近年来逐渐引起船舶动力领域广泛关注。尽管目前船舶工业已提出了氨燃料发动机概念但是受限于技术限制目前仍未有成熟的产品。一方面,对于氨燃料发动机的性能缺乏全面的研究,另外一方面,对于氨燃料发动机匹配何种动力系统也未有明确的技术方案。因此,目前氨燃料发动机的研发仍处于初步阶段,氨燃料发动机的混合动力系统更是处于技术空白阶段。
3、船舶混合动力系统兼有传统内燃机推进和纯电力推进的优点,混合动力系统在综合能效,节能减排以及振动噪声方面有着明显的优势,同时相较于纯电力推进系统,匹配小容量的电池就能够满足长续航里程,成本较低。基于氨燃料发动机的混合动力系统能够既满足零碳动力的要求,同时能够弥补氨燃料发动机的低负荷效率低,冷启动困难等问题,电机的引入同时能够改善氨燃料发动机的动态特性,实现多动力源的优势互补。基于氨燃料发动机的混合动力系统将成为未来零碳动力的最佳动力形式之一。
4、目前基于氨燃料发动机的动力发电单元只是将氨燃料发动机与电机简单的机械耦合,其控制方法由各自控制器独立完全,这就导致了其控制的不协调且造成硬件浪费,同时对于整体的发电单元需要从整体协调控制才能发挥出最大优势。
技术实现思路
1、本发明的目的在于提供能克服传统混合动力发电单元发动机与电机单独控制导致控制效果差等缺点的一种基于转矩观测器的船舶混合动力智能发电单元协同控制方法。
2、本发明的目的是这样实现的:
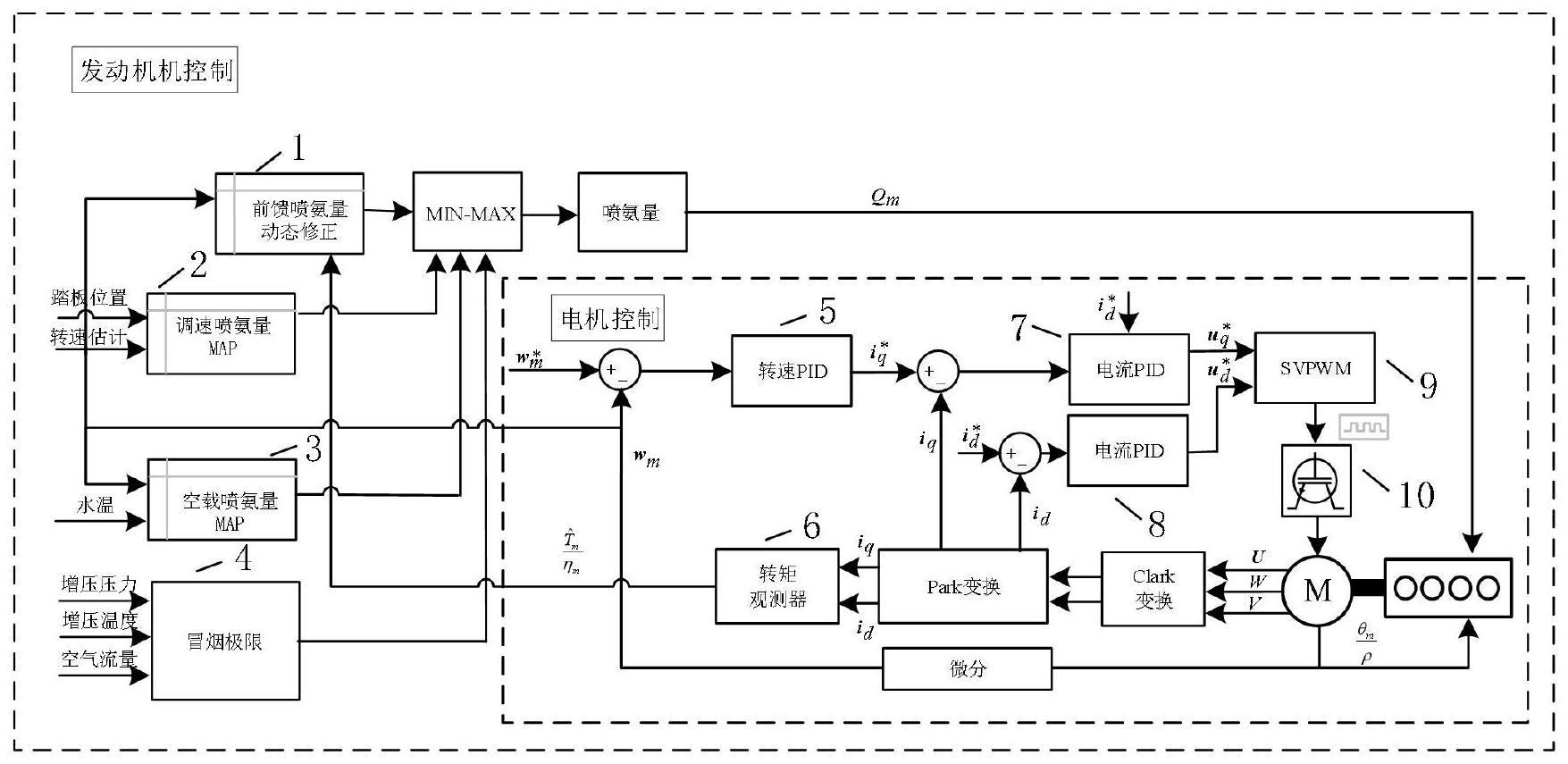
3、本发明一种基于转矩观测器的船舶混合动力智能发电单元协同控制方法,其特征是:包括氨燃料发动机、三相永磁同步电机,氨燃料发动机采用油门转矩控制,三相永磁同步电机采用转速控制;氨燃料发动机预制冒烟极限限制查表、空载喷氨量map查表、调速喷氨量map查表、前馈喷氨量动态修正查表,冒烟极限限制查表以增压压力、增压温度、空气流量为输入,空载喷氨量map查表以冷却水温,估计转速为输入,调速喷氨量map查表以踏板位置、估计转速为输入,前馈喷氨量动态修正查表以估计转速和估计扭矩为输入,来综合优化喷氨量从而控制氨发动机转速;氨燃料发动机中的飞轮信号盘的宽齿间隙所对应轴心的中心线与三相永磁同步电机的定子绕组a相空间位置轴线对齐,同时采用的三相坐标系以及交直轴坐标系中a相与直轴对齐。
4、本发明还可以包括:
5、1、三相永磁同步电机转速控制包括位置传感器、转矩观测器、转矩观测器、转速pid环、电流pid环,采用位置传感器测量电机转子位置,采用转矩观测器观测电磁转矩,转矩观测器采用扩张状态观测器的形式,转速采用pid环以及电流采用pid环双环控制;
6、转矩观测器表达式为:
7、
8、
9、
10、
11、
12、其中:kactive为有功磁链;ld为直轴电感;lq为轴电感;rreq为虚拟电阻;id为定子直轴电流;iq为定子交轴电流;ke为永磁体磁链;为电机转速估计值;npp为电机极对数;js为电机转动惯量;为负载扭矩估计值;lp为转矩观测器增益;ε为误差算子。
13、2、氨燃料发动机估计转速与电机估计转速换算关系为:
14、
15、其中:ne为氨燃料发动机转速;θe为曲轴转角角度;θr为电机转子角度;te为发动机扭矩;ηm为电机效率。
16、3、采样三相永磁同步电机的三相电流,将其转化为clark坐标系下对应的α、β轴电流,以α、β轴电流作为输入,以位置传感器采样得到的电机转子角度作为输入对α、β轴下定子电流进行park变换得到d q轴下的定子电流;以dq轴下的定子电流以及电机速度作为输入,通过转矩观测器表达式计算得到电机估计转速与负载扭矩估计值,电机转速真实值与给定转速做差进入到转速pid环,转速pid环输出参考d q轴电流与电机实际反馈的定子d q轴电流做差经过直轴电流pid环与交轴电流pid环后输出给定d、q轴下参考电压,经过svpwm发波模块向逆变器发送信号控制电机定子电流来控制转速。
17、4、由电机控制得到的电机转速真实值与电机负载转矩估计值经过式转换为氨发动机转速与负载扭矩;其中以氨发动机转速与扭矩作为输入查询前馈喷氨量动态修正表得到前馈值,通过需求转矩得到的踏板位置与发动机转速一起作为输入量查询调速喷氨量map表作为增量,以冷却水温与发动机转速为输入量查空载喷氨量map表得到空载喷氨量,以增压压力、增压温度、空气流量作为输入查冒烟极限作为喷氨量限制,以前馈喷氨量、调速喷氨量、空载喷氨量累加,以冒烟极限为限制,采用min/max策略输出发动机所需的喷氨量,完成发动机油门转矩控制。
18、本发明的优势在于:
19、1、本发明提出一种基于转矩观测器的船舶混合动力智能发电单元及协同控制策略,硬件设计上取消了氨燃料发动机的曲轴传感器,采用曲轴飞轮端的信号盘宽齿中心线与三相永磁电机a向空间轴线对齐布置的方式。采用该种设计方式,能够通过获取电机转子的位置来推算氨发动机曲轴转角的位置,且无需复杂的换算。一方面节省了传感器的硬件成本,另一方面对于发动机控制器信号处理的压力也大大减小,节省了计算空间。
20、2、混合动力智能发电单元协同控制策略采用发动机油门扭矩控制,电机转速控制,充分考虑了二者的动态特性,即利用电机的动态响应快的有点,迅速达到高转速状态,发动机利用油门控制加载,能够使发动机尽量工作在高转速区,发动机经济性较好。
21、3、三相永磁同步电机采用速度控制的方法,采用了扩张状态观测器估计出电机的转速与转矩;电机的估计转矩能够为氨燃料发动机作为前馈输入,充分提高了氨发动机的动态响应。
22、4、电机采用转速控制,能够在启动阶段,直接采用转速环倒拖氨燃料发动机到怠速,在功率输出阶段不用进行控制模式的切换,减少了控制难度。
23、5、本发明采用了氨燃料发动机,清洁低碳,符合绿色船舶的发展方向。
技术特征:
1.一种基于转矩观测器的船舶混合动力智能发电单元协同控制方法,其特征是:包括氨燃料发动机、三相永磁同步电机,氨燃料发动机采用油门转矩控制,三相永磁同步电机采用转速控制;氨燃料发动机预制冒烟极限限制查表、空载喷氨量map查表、调速喷氨量map查表、前馈喷氨量动态修正查表,冒烟极限限制查表以增压压力、增压温度、空气流量为输入,空载喷氨量map查表以冷却水温,估计转速为输入,调速喷氨量map查表以踏板位置、估计转速为输入,前馈喷氨量动态修正查表以估计转速和估计扭矩为输入,来综合优化喷氨量从而控制氨发动机转速;氨燃料发动机中的飞轮信号盘的宽齿间隙所对应轴心的中心线与三相永磁同步电机的定子绕组a相空间位置轴线对齐,同时采用的三相坐标系以及交直轴坐标系中a相与直轴对齐。
2.根据权利要求1所述的一种基于转矩观测器的船舶混合动力智能发电单元协同控制方法,其特征是:三相永磁同步电机转速控制包括位置传感器、转矩观测器、转矩观测器、转速pid环、电流pid环,采用位置传感器测量电机转子位置,采用转矩观测器观测电磁转矩,转矩观测器采用扩张状态观测器的形式,转速采用pid环以及电流采用pid环双环控制;
3.根据权利要求1所述的一种基于转矩观测器的船舶混合动力智能发电单元协同控制方法,其特征是:氨燃料发动机估计转速与电机估计转速换算关系为:
4.根据权利要求2所述的一种基于转矩观测器的船舶混合动力智能发电单元协同控制方法,其特征是:采样三相永磁同步电机的三相电流,将其转化为clark坐标系下对应的α、β轴电流,以α、β轴电流作为输入,以位置传感器采样得到的电机转子角度作为输入对α、β轴下定子电流进行park变换得到dq轴下的定子电流;以dq轴下的定子电流以及电机速度作为输入,通过转矩观测器表达式计算得到电机估计转速与负载扭矩估计值,电机转速真实值与给定转速做差进入到转速pid环,转速pid环输出参考dq轴电流与电机实际反馈的定子dq轴电流做差经过直轴电流pid环与交轴电流pid环后输出给定d、q轴下参考电压,经过svpwm发波模块向逆变器发送信号控制电机定子电流来控制转速。
5.根据权利要求3所述的一种基于转矩观测器的船舶混合动力智能发电单元协同控制方法,其特征是:由电机控制得到的电机转速真实值与电机负载转矩估计值经过式转换为氨发动机转速与负载扭矩;其中以氨发动机转速与扭矩作为输入查询前馈喷氨量动态修正表得到前馈值,通过需求转矩得到的踏板位置与发动机转速一起作为输入量查询调速喷氨量map表作为增量,以冷却水温与发动机转速为输入量查空载喷氨量map表得到空载喷氨量,以增压压力、增压温度、空气流量作为输入查冒烟极限作为喷氨量限制,以前馈喷氨量、调速喷氨量、空载喷氨量累加,以冒烟极限为限制,采用min/max策略输出发动机所需的喷氨量,完成发动机油门转矩控制。
技术总结
本发明的目的在于提供一种基于转矩观测器的船舶混合动力智能发电单元协同控制方法,包括氨燃料发动机、三相永磁同步电机,氨燃料发动机采用油门转矩控制,三相永磁同步电机采用转速控制;氨燃料发动机预制冒烟极限限制查表、空载喷氨量MAP查表、调速喷氨量MAP查表、前馈喷氨量动态修正查表,冒烟极限限制查表以增压压力、增压温度、空气流量为输入,空载喷氨量MAP查表以冷却水温,估计转速为输入,调速喷氨量MAP查表以踏板位置、估计转速为输入,前馈喷氨量动态修正查表以估计转速和估计扭矩为输入,来综合优化喷氨量从而控制氨发动机转速。本发明以电机转速估计发动机转速与以电机转子位置估计曲轴转角位置,从而节省了发动机曲轴传感器成本。
技术研发人员:范立云,徐超,孙进伟,徐魁,姜泽军,陈澳雪
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!