一种双船浮托式海洋平台拆除方法
本发明属于海洋工程,具体说是一种双船浮托式海洋平台拆除方法。
背景技术:
1、
2、海洋平台主要通过吊装法和浮托法进行拆除,吊装法需租用费用高昂的大型起重船,而浮托法特别是双船浮托法易受波浪环境载荷的影响,需等待足够窗口期,或通过特制船舶进行作业,造价高昂。
3、因此,如何设计一种双船浮托式海洋平台拆除方法,可以保证拆除过程中上部组块的稳定,扩大作业窗口且毋须使用大型浮吊或特种专用浮托作业船,从而可以大幅降低拆除费用。这是本领域亟待解决的技术问题。
技术实现思路
1、本发明针对现有技术存在的问题和不足,提供一种双船浮托式海洋平台拆除方法,拆除过程避免制造、租赁费用高昂的大型浮吊或特种船只,从而降低海洋平台拆除费用。
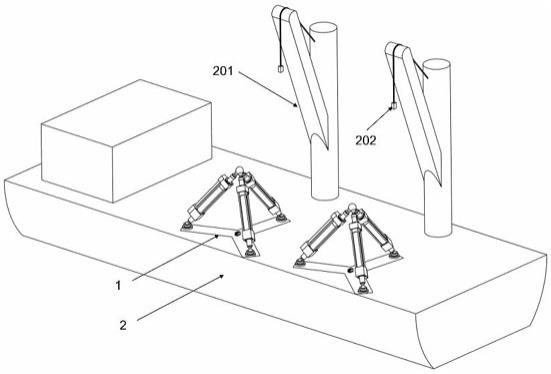
2、本发明的目的是通过以下技术方案实现的:一种双船浮托式海洋平台拆除方法,所述海洋平台包括导管架和上部组块,其特征在于,拆除上部组块过程中使用运输船和两艘起重船,两艘起重船配置协同动力定位系统、位移控制系统及两个连接臂,所述的连接臂上安装有激光测距传感器,所述的激光测距传感器用于检测所述上部组块与所述导管架的间距,两艘所述起重船上分别安装有压载水箱、侧推装置、两个大型吊机及两个运动补偿装置,所述的运动补偿装置包括姿态传感器、作动器以及连接起重船与连接臂的球铰,两个所述的大型吊机用于将两个所述连接臂提升,所述连接臂的两端用于分别与两艘所述起重船上的两个所述运动补偿装置连接,所述海洋平台的上部组块拆除方法包括如下施工步骤:
3、步骤1:在实施上部组块拆除前需完成以下工作:
4、步骤1.1:所述海洋平台已经完成弃置井口工作,选择适合的气候窗口准备进行海洋平台的上部组块拆除作业;
5、步骤1.2:根据拆除海洋平台尺寸选择匹配的连接臂,在起重船的甲板上确定运动补偿装置的安装位置;
6、步骤1.3:两艘起重船分别对应布置于海上平台的两侧,同时调整起重船吃水深度,在保证各所述运动补偿装置上端支点水平高度一致的同时,使连接臂保持水平状态且连接臂上表面低于所述海洋平台的底面;所述的协同动力定位系统计算作业位置,所述协同动力定位系统保证两艘起重船在作业过程中的协作精度;
7、步骤1.4:一艘所述起重船在船侧安装有两个所述大型吊机,两个所述大型吊机作业将两个所述连接臂提升,两个所述连接臂的一端分别与同一艘所述起重船上对应的所述运动补偿装置通过安装于运动补偿装置顶端的球铰连接,所述连接臂整体与起重船垂直对齐于两艘起重船中线;
8、步骤1.5:所述的两艘起重船通过所述位移控制系统向所述海洋平台移动,通过所述协同定位系统调节所述侧推装置转速保证两艘所述起重船接近过程的速度相同;
9、步骤1.6:在所述的两艘起重船到达指定位置时,两个所述连接臂的另一端分别与另一艘所述起重船上对应的两个所述运动补偿装置连接,所述的大型吊机释放与所述连接臂连接的吊钩,所述连接臂载荷完全由两艘所述起重船甲板安装的所述运动补偿装置承担;
10、步骤1.7:所述的起重船通过所述压载水箱排载减小吃水,使两个所述的连接臂顶面与所述的上部组块底面接触并产生一定预压力;
11、步骤1.8:所述的上部组块与所述导管架切割分离;
12、步骤2:完成拆除前的准备工作后,启动所述的上部组块整体拆除作业,包括如下步骤:
13、步骤2.1:同步启动两艘所述起重船卸载排水,控制排载速度相同,使所述的上部组块的载荷逐渐完成由所述导管架向两个所述连接臂的转移;
14、步骤2.2:两个所述的连接臂与两艘所述起重船均通过运动补偿装置连接,所述起重船及连接臂上均配备有所述姿态传感器,所述的姿态传感器测量所述起重船及连接臂在所述海洋平台的上部组块拆除作业过程中的位姿变化,反馈给所述的协同控制系统,通过计算控制所述的作动器作动,保持所述运动补偿装置与所述连接臂连接点稳定,使所述上部组块在所述连接臂作用下稳定提升;
15、步骤2.3:当所述的上部组块载荷转移完成时,使两艘所述起重船继续同步卸载排水,使所述上部组块与所述导管架完全分离;
16、步骤2.4:所述连接臂上的所述激光测距传感器检测所述上部组块与导管架间距,当所述上部组块底部与所述导管架在垂直方向超过设定安全高度后,停止两艘所述起重船排载操作,所述两艘起重船同时驶离所述导管架;
17、步骤2.5:运输船在步骤2.4操作完成后缓慢行驶至两艘所述起重船中间承担的所述上部组块的下方,两艘所述起重船通过向压载水箱加载使所述的起重船增加吃水,完成所述上部组块及所述连接臂由所述起重船到所述运输船的载荷转移;
18、步骤2.6:所述起重船通过水箱加载增加吃水,所述运动补偿装置完全脱离所述连接臂,再次启动所述侧推装置,控制所述起重船与运输船达到安全距离,由所述运输船完成输运任务,海洋平台拆除作业完成。
19、对上述技术方案的改进:在实施上部组块拆除前,根据所述的海洋平台尺寸自主选择匹配的所述起重船吨位。
20、对上述技术方案的进一步改进:在实施上部组块拆除前,所述的连接臂根据所述海洋平台尺寸确定匹配的长度,所述连接臂与所述运动补偿装置的连接点根据作业需求调整。
21、对上述技术方案的进一步改进:拆除上部组块过程中,两艘所述起重船及四个所述运动补偿装置通过两个所述连接臂连接形成整体式结构。
22、对上述技术方案的进一步改进:所述的运动补偿装置由三根作动器组成三维运动补偿装置,所述的作动器下端固定于所述起重船,三根所述作动器的上端集中于一点,实现空间三个方向的移动。便于补偿海洋平台拆除作业过程中由于所述起重船运动对所述连接臂及所述上部组块的影响。
23、与现有技术相比,本发明的优点和积极效果是:
24、本发明通过对两艘常规的起重船加装运动补偿装置,通过举升臂整体托举上部组块进行整体式分离拆除,可以根据作业对象尺度选择和调整举升臂长度及与运动补偿装置的安装位置,对拆除作业过程中船舶受到环境载荷产生的多自由度进行补偿,保证拆除过程中上部组块的稳定,扩大作业窗口且毋须使用大型浮吊或特种专用浮托作业船,从而可以大幅降低拆除费用。
技术特征:
1.一种双船浮托式海洋平台拆除方法,所述海洋平台包括导管架和上部组块,其特征在于,拆除上部组块过程中使用运输船和两艘起重船,两艘起重船配置协同动力定位系统、位移控制系统及两个连接臂,所述的连接臂上安装有激光测距传感器,所述的激光测距传感器用于检测所述上部组块与所述导管架的间距,两艘所述起重船上分别安装有压载水箱、侧推装置、两个大型吊机及两个运动补偿装置,所述的运动补偿装置包括姿态传感器、作动器以及连接起重船与连接臂的球铰,两个所述的大型吊机用于将两个所述连接臂提升,所述连接臂的两端用于分别与两艘所述起重船上的两个所述运动补偿装置连接,所述海洋平台的上部组块拆除方法包括如下施工步骤:
2.根据权利要求1所述的双船浮托式海洋平台拆除方法,其特征在于,在实施上部组块拆除前,根据所述的海洋平台尺寸自主选择匹配的所述起重船吨位。
3.根据权利要求1或2所述的双船浮托式海洋平台拆除方法,其特征在于,在实施上部组块拆除前,所述的连接臂根据所述海洋平台尺寸确定匹配的长度,所述连接臂与所述运动补偿装置的连接点根据作业需求调整。
4.根据权利要求1或2所述的双船浮托式海洋平台拆除方法,其特征在于,拆除上部组块过程中,两艘所述起重船及四个所述运动补偿装置通过两个所述连接臂连接形成整体式结构。
5.根据权利要求3所述的双船浮托式海洋平台拆除方法,其特征在于,拆除上部组块过程中,两艘所述起重船及四个所述运动补偿装置通过两个所述连接臂连接形成整体式结构。
6.根据权利要求1或2所述的双船浮托式海洋平台拆除方法,其特征在于,所述的运动补偿装置由三根作动器组成三维运动补偿装置,所述的作动器下端固定于所述起重船,三根所述作动器的上端集中于一点,实现空间三个方向的移动。
7.根据权利要求3所述的双船浮托式海洋平台拆除方法,其特征在于,所述的运动补偿装置由三根作动器组成三维运动补偿装置,所述的作动器下端固定于所述起重船,三根所述作动器的上端集中于一点,实现空间三个方向的移动。
8.根据权利要求5所述的双船浮托式海洋平台拆除方法,其特征在于,所述的运动补偿装置由三根作动器组成三维运动补偿装置,所述的作动器下端固定于所述起重船,三根所述作动器的上端集中于一点,实现空间三个方向的移动。
技术总结
本发明公开了一种双船浮托式海洋平台拆除方法,属于海洋平台拆除技术领域,其特点是:包括两艘装有运动补偿装置的起重船、两根直接与上部组块接触的连接臂以及运输船。在将海洋平台的上部组块和导管架切割后,两艘起重船排载减小吃水,通过与运动补偿装置连接的连接臂对上部组块进行整体托举,并使上部组块远离导管架,运输至运输船上方。此间运动补偿装置通过检测起重船及连接臂姿态,控制作动器作动以保持与连接臂接触点稳定,保证上部组块在举升及运输过程中的稳定。利用本发明进行海洋平台拆除,可根据作业对象选择连接臂使用长度及与运动补偿装置的连接位置,适用性强,同时,避免使用大型浮吊以及租赁昂贵特种浮托船,从而大幅度降低费用。
技术研发人员:周志鹏,常宗瑜,赵林,徐龙达,王海波,郑中强
受保护的技术使用者:中国海洋大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!