一种无人保洁船的满载感应装置及感应方法与流程
本发明涉及水环境治理,具体为一种无人保洁船的满载感应装置及感应方法。
背景技术:
1、无人保洁船在进行水面垃圾清理时,垃圾一般都存储于载物框中。而由于没有人工进行操控,因此需要对垃圾是否满载进行自动判断,否则假如满载时没有进行及时的停止,就会因为超载而发生危险。
2、因此目前无人保洁船上都会安装满载感应装置,在载物框达到满载状态时,及时地通知后台监控人员,通过后台远程操作来停止垃圾传送带的传送,即可避免载物框内继续进入垃圾,从而可以充分减少发生故障的风险。
3、但是目前的满载感应装置具有局限性,在载物框在满载后,不能继续把传送带上剩下的垃圾给收集掉,导致载物框的收集能力受到限制,为此,我们提出一种无人保洁船的满载感应装置及感应方法。
技术实现思路
1、本发明的目的在于提供一种无人保洁船的满载感应装置及感应方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种无人保洁船的满载感应装置,包括,载物框,所述载物框的底部四周处均设置有插杆;
3、所述插杆上设置有感应组件;
4、所述感应组件包括四组结构相同的插槽,四组插杆分别插接在四组插槽内,四组插槽的底端均连接有称重传感器,所述称重传感器上均设置有安装架,四组安装架的底端均设置在固定框上,所述固定框固定在无人保洁船的船体上,所述固定框上设置有安装杆,所述安装杆上设置有控制器、信号发射器和信号接收器;
5、所述载物框的两侧下部均匀开设有滤孔一,所述载物框的底部两侧均匀开设有滤孔二,且固定框的底部设置有贯穿无人保洁船船体的排水管;
6、所述安装杆的顶部设置有压实组件;
7、所述固定框上设置有加热组件。
8、作为本发明所述一种无人保洁船的满载感应装置的一种优选方案,其中:所述压实组件包括设置在安装杆顶部的电动导轨,所述电动导轨的输出端设置有滑块,所述滑块上设置有电机一,所述电机一的输出轴设置有连接杆,所述连接杆上设置有压板,所述压板与载物框的内壁相匹配。
9、作为本发明所述一种无人保洁船的满载感应装置的一种优选方案,其中:所述压板的底部开设有凹槽,所述凹槽的内壁底部贴合连接有固定板,所述固定板的顶部与电机二的输出轴连接,所述电机二设置在连接块上,且连接块与气缸的活塞杆连接,所述气缸设置在压板的顶部。
10、作为本发明所述一种无人保洁船的满载感应装置的一种优选方案,其中:所述固定板的底部均匀设置有插杆,且插杆的底端均呈尖锥状。
11、作为本发明所述一种无人保洁船的满载感应装置的一种优选方案,其中:所述固定框的顶部前后两侧均设置有挡板,且挡板的顶部与载物框连接,所述滤孔二位于两组挡板之间。
12、作为本发明所述一种无人保洁船的满载感应装置的一种优选方案,其中:所述加热组件包括安装盒和通风盒,所述安装盒的底部与通风盒连通,所述安装盒和通风盒的前后两端分别与两组挡板连接,所述安装盒内设置有电加热丝,所述安装盒的顶端均匀开设有通孔,所述固定框上设置有鼓风机,且鼓风机的出风口与通风盒连通。
13、作为本发明所述一种无人保洁船的满载感应装置的一种优选方案,其中:前侧挡板的两侧均设置有电机三,两组电机三的输出轴均设置有转轴,两组转轴上均设置有导向板,两侧导向板的前后两侧分别与两组挡板相接触。
14、作为本发明所述一种无人保洁船的满载感应装置的一种优选方案,其中:两组转轴的后端分别与后侧挡板通过轴承转动连接。
15、作为本发明所述一种无人保洁船的满载感应装置的一种优选方案,其中:所述载物框的顶部左侧设置有斜板。
16、一种无人保洁船的满载感应装置的感应方法,具体包括如下步骤:
17、步骤一:将固定框安装在无人保洁船的船体上,使排水管与外部河道连通,无人保洁船传送带将收集的垃圾通过传送带落到斜板上,再通过斜板落到载物框内进行收集,称重传感器检测载物框的重量,并把重量发送给控制器,当重量达到满载时,控制器将信号通过信号发射器发送给监控后台,监控后台通过信号接收器发送控制信号,使得控制器可以控制无人保洁船停止传送带的传送以及垃圾的打捞,然后使无人保洁船向岸边行驶,同时控制电动导轨带动滑块向下移动,使得压板进入到载物框内,配合固定板对载物框内的垃圾进行压实,同时插杆对垃圾进行刺破,使得垃圾中的水分能够通过两侧的滤孔一和滤孔二排出,通过滤孔一排出的水分直接落进固定框内,通过两侧滤孔二排出的水分通过两侧导向板导向后排到固定框内,最后由排水管排出到河道;
18、步骤二:压实后,电动导轨带动压板以及固定板均向上移动一定的距离,给载物框内压实的垃圾腾出可以空间,然后再通过气缸带动连接块向下移动,使得固定板脱离凹槽,此时再通过电机二带动固定板来回摆动,即可带动插杆来回摆动,将压实的垃圾给挑松;
19、步骤三:挑松后,使压板和固定板均复位,通过通过电机三带动转轴转动,使得两侧导向板转动,直到两侧导向板的底端分别位于安装盒的两侧,两侧导向板的顶端均与载物框的底部两端相接触即可,此时开启鼓风机和电加热丝,使得热空气从通孔处喷出时,可以通过两侧导向板和挡板对热空气进行导向,进而使得热空气能够从滤孔二进入到载物框内,对挑松后的垃圾进行烘干,进一步减少垃圾中的水分;
20、步骤四:加热后,使导向板复位,此时载物框内的垃圾重量已经减小,即可再次开启传送带,将传送带上剩下的垃圾给收集掉,提高载物框的收集能力。
21、与现有技术相比,本发明的有益效果是:
22、1、在载物框满载后,需要关闭传送带,避免传送带上剩下的垃圾进入到载物框内,进而在满载后可以对载物框内的垃圾进行压实和刺破,将垃圾中的水分通过滤孔一、滤孔二和排水管排出到外部河道中,然后对压实的垃圾进行挑松和烘干,可以进一步减少了垃圾中的水分,从而大大减小了载物框满载后垃圾的重量,即可再次开启传送带,将传送带上剩下的垃圾给收集掉,提高载物框的收集能力;
23、2、通过设置可转动的导向板,在压实刺破垃圾排出水分时,使两侧导向板的顶端相互靠近,即可对水分进行导向,避免水分落到安装盒内,影响加热组件的使用;在对垃圾进行加热烘干时,使两侧导向板的底端相互靠近,直到两侧导向板的底端分别位于安装盒的两侧,两侧导向板的顶端均与载物框的底部两端相接触即可,使得热空气从通孔处喷出时,可以通过两侧导向板和挡板对热空气进行导向,使得热空气能够从滤孔二进入到载物框内,减少热空气的流失。
技术特征:
1.一种无人保洁船的满载感应装置,其特征在于:包括,
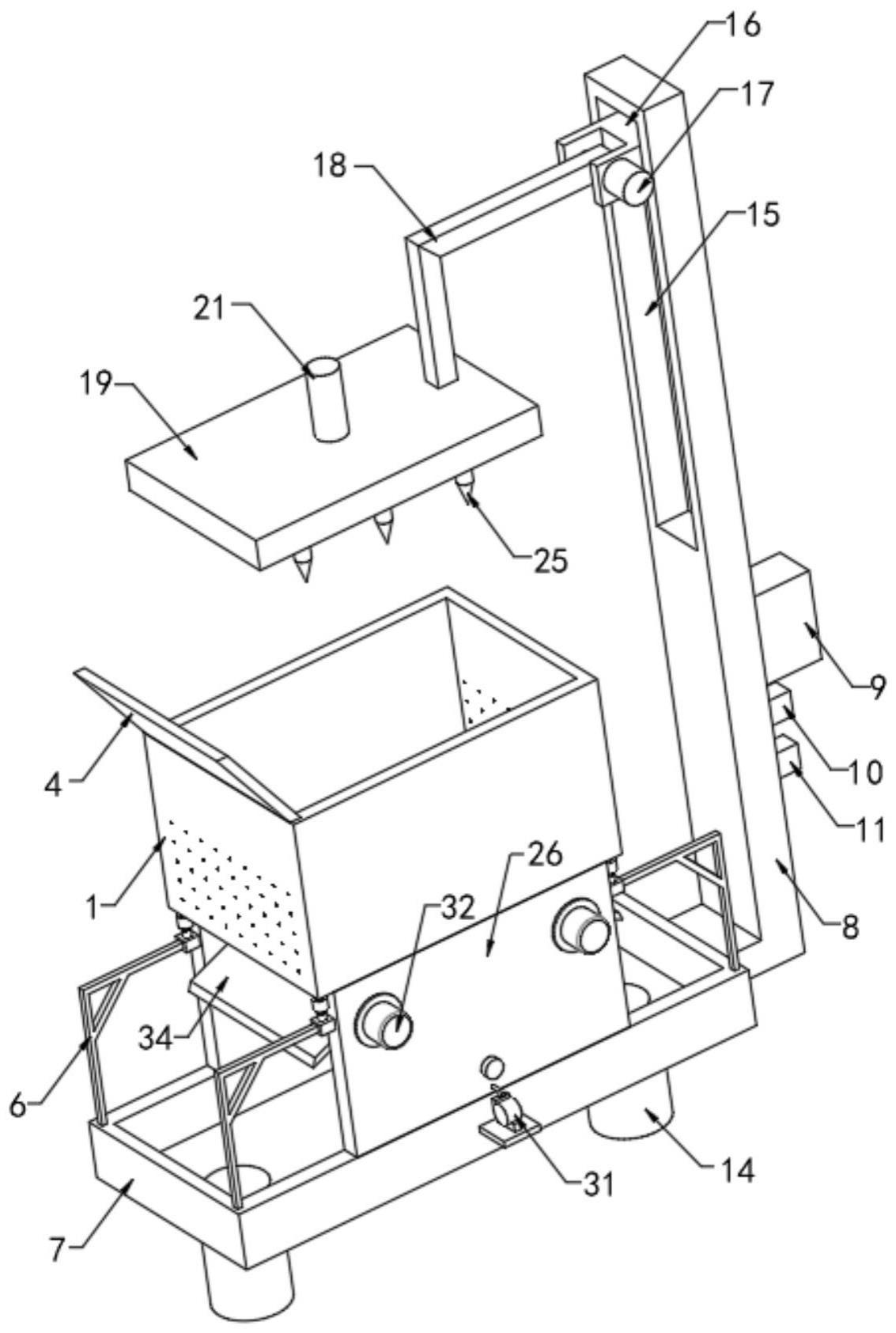
2.根据权利要求1所述的一种无人保洁船的满载感应装置,其特征在于:所述压实组件包括设置在安装杆(8)顶部的电动导轨(15),所述电动导轨(15)的输出端设置有滑块(16),所述滑块(16)上设置有电机一(17),所述电机一(17)的输出轴设置有连接杆(18),所述连接杆(18)上设置有压板(19),所述压板(19)与载物框(1)的内壁相匹配。
3.根据权利要求2所述的一种无人保洁船的满载感应装置,其特征在于:所述压板(19)的底部开设有凹槽(20),所述凹槽(20)的内壁底部贴合连接有固定板(24),所述固定板(24)的顶部与电机二(23)的输出轴连接,所述电机二(23)设置在连接块(22)上,且连接块(22)与气缸(21)的活塞杆连接,所述气缸(21)设置在压板(19)的顶部。
4.根据权利要求3所述的一种无人保洁船的满载感应装置,其特征在于:所述固定板(24)的底部均匀设置有插杆(25),且插杆(25)的底端均呈尖锥状。
5.根据权利要求1所述的一种无人保洁船的满载感应装置,其特征在于:所述固定框(7)的顶部前后两侧均设置有挡板(26),且挡板(26)的顶部与载物框(1)连接,所述滤孔二(13)位于两组挡板(26)之间。
6.根据权利要求5所述的一种无人保洁船的满载感应装置,其特征在于:所述加热组件包括安装盒(27)和通风盒(28),所述安装盒(27)的底部与通风盒(28)连通,所述安装盒(27)和通风盒(28)的前后两端分别与两组挡板(26)连接,所述安装盒(27)内设置有电加热丝(29),所述安装盒(27)的顶端均匀开设有通孔(30),所述固定框(7)上设置有鼓风机(31),且鼓风机(31)的出风口与通风盒(28)连通。
7.根据权利要求5所述的一种无人保洁船的满载感应装置,其特征在于:前侧挡板(26)的两侧均设置有电机三(32),两组电机三(32)的输出轴均设置有转轴(33),两组转轴(33)上均设置有导向板(34),两侧导向板(34)的前后两侧分别与两组挡板(26)相接触。
8.根据权利要求7所述的一种无人保洁船的满载感应装置,其特征在于:两组转轴(33)的后端分别与后侧挡板(26)通过轴承转动连接。
9.根据权利要求1所述的一种无人保洁船的满载感应装置,其特征在于:所述载物框(1)的顶部左侧设置有斜板(4)。
10.根据权利要求1-9任意一项所述的一种无人保洁船的满载感应装置的感应方法,其特征在于:该方法包括如下步骤:
技术总结
本发明公开了水环境治理技术领域的一种无人保洁船的满载感应装置及感应方法,包括,载物框,所述载物框的底部四周处均设置有插杆;所述插杆上设置有感应组件;所述感应组件包括四组结构相同的插槽,四组插杆分别插接在四组插槽内,四组插槽的底端均连接有称重传感器,所述称重传感器上均设置有安装架,四组安装架的底端均设置在固定框上,在满载后可以对载物框内的垃圾进行压实和刺破,将垃圾中的水分通过滤孔一、滤孔二和排水管排出到外部河道中,然后对压实的垃圾进行挑松和烘干,可以进一步减少了垃圾中的水分,从而大大减小了载物框满载后垃圾的重量,即可再次开启传送带,将传送带上剩下的垃圾给收集掉,提高载物框的收集能力。
技术研发人员:邓松强,葛华,庹刚,陈闽南
受保护的技术使用者:苏州同和环保工程有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!