一种水面漂浮物智能识别与收集机器人
本发明属于水面机器人,具体地说是一种水面漂浮物智能识别与收集机器人。
背景技术:
1、当前水面垃圾污染逐渐成为世界各国近岸海域、江河、湖泊、水库等普遍多发的污染现象。传统的水上清污主要依靠人工打捞漂浮物作业,存在清污难度大、安全风险高、清污效率低、清污效果差、清污效益低的不足,难以实现低成本、全天时、全天候、高效率;且目前缺乏成熟的技术手段实现自动监测、识别、追踪和收集水面漂浮物。目前出现了水面清污设备,但是这些设备存在结构复杂,操作繁琐,工作效率低,费效比高等缺点。这就迫切需要研制水面智能清污机器人系统来实现水面漂浮物的智能识别与自动收集。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种水面漂浮物智能识别与收集机器人,主要实现水面漂浮物的多目标识别、自主规划控制航行至目标点、自动收集作业功能。
2、为实现上述目的,本发明采用以下技术方案:
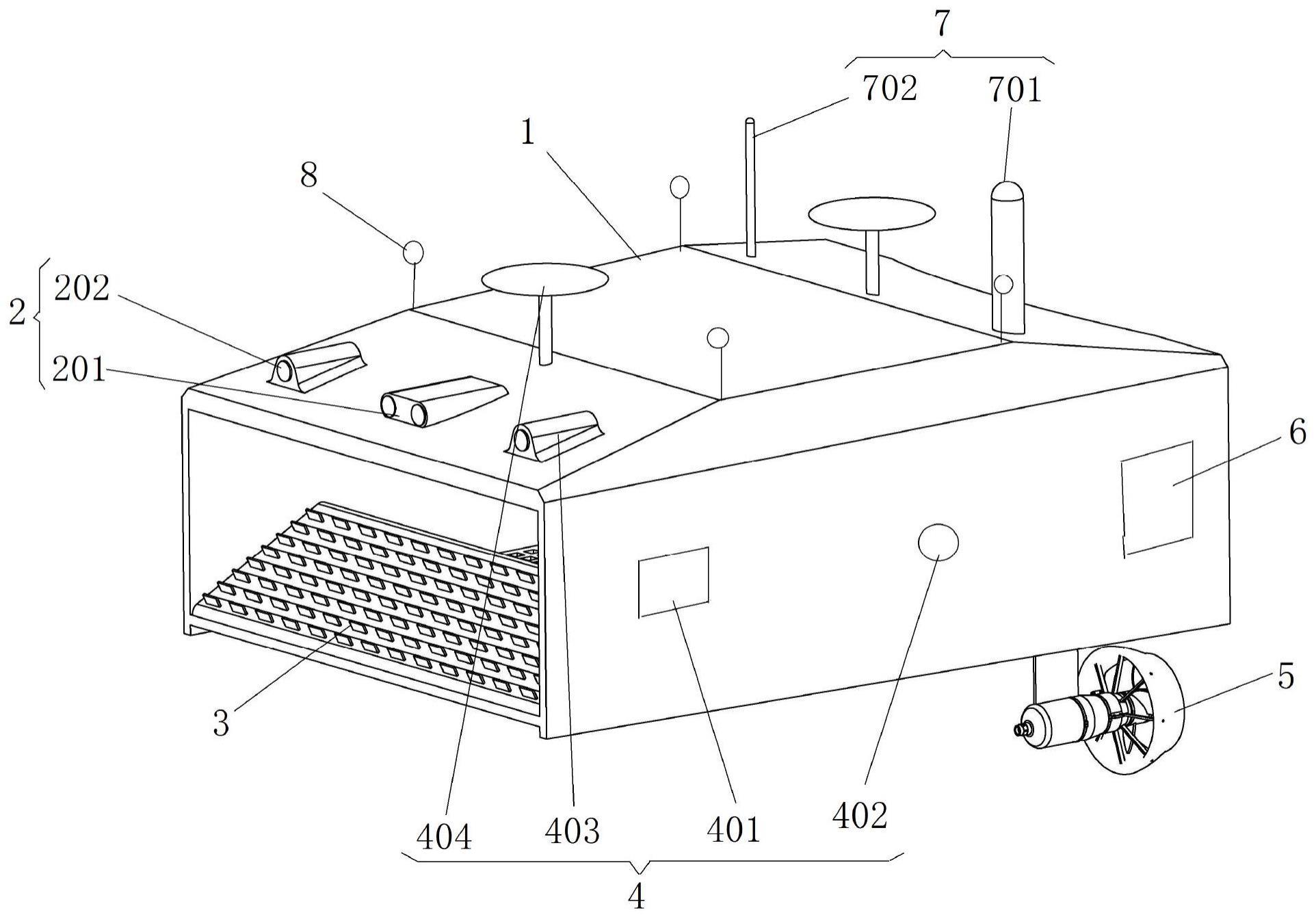
3、本发明提供一种水面漂浮物智能识别与收集机器人,包括:
4、壳体,前端开口,壳体用于收集水面漂浮物;
5、光学探测系统,设置于壳体的艏部顶面,用于对水面进行光学探测;
6、漂浮物滚动收集系统,设置于壳体的前端开口处,漂浮物滚动收集系统用于将水面漂浮物导入壳体内;
7、控制导航系统,设置于壳体的外侧,用于机器人自主规划避障航向;
8、推进系统,设置于壳体的后端,用于实现机器人的直航和转向运动;
9、能源系统,设置于壳体上,用于提供能源;
10、通信系统,设置于壳体的顶部,用于机器人与水面通信和定位功能。
11、所述漂浮物滚动收集系统包括三角履带传输机构、电机及传动皮带,其中三角履带传输机构设置于所述壳体的前端开口处,且尖端朝前;电机设置于三角履带传输机构的内侧且通过传动皮带与三角履带传输机构传动连接,电机驱动三角履带传输机构向所述壳体的内侧旋转,从而将漂浮于水面上的漂浮物收集至所述壳体内。
12、所述三角履带传输机构包括履带和用于支撑履带的三个滚轮,其中两个滚轮前后布置于底部,第三个滚轮位于底部后侧滚轮的上方,三个滚轮的两端均与所述壳体转动连接;所述传动皮带与一滚轮传动连接。
13、所述履带的外表面间隔设有多组刺爪,通过刺爪勾取水面漂浮物。
14、所述光学探测系统包括双目视觉传感器和光源,其中双目视觉传感器设置于壳体的艏部顶面中间位置,双目视觉传感器用于拍摄水面图像;光源设置于双目视觉传感器的一侧,用于辅助双目视觉传感器拍摄图像时进行补光。
15、所述控制导航系统包括自动驾驶舱及均与自动驾驶舱连接的侧向超声波测距传感器、艏向超声波测距传感器及差分定位装置,其中自动驾驶舱设置于所述壳体的艏部,侧向超声波测距传感器设置于所述壳体的左右两侧,用于测量所述壳体侧向距障碍物的距离,并传送给自动驾驶舱;
16、艏向超声波测距传感器设置于所述壳体的艏部顶面,用于测量所述壳体前向距障碍物的距离,并传送给自动驾驶舱;
17、差分定位装置设置于所述壳体顶部,差分定位装置能够实时输出水面漂浮物智能识别与收集机器人的实时位置和航行,并发送给自动驾驶舱;
18、自动驾驶舱根据接收到距障碍物的距离信息和当前航向能够自主规划出避障航向。
19、所述推进系统包括设置于所述壳体艉部两侧的左推进器和右推进器,左推进器和右推进器分别采用独立电机进行控制,且左推进器和右推进器通过差动提供水平面的转动力矩,驱动水面漂浮物智能识别与收集机器人转向。
20、所述通信系统包括示位频闪灯和无线网络天线和无线电天线。
21、所述壳体为方形笼式结构,左右两侧为密封的玻璃钢材质腔体,所述壳体的下底板和后面板采用镂空高分子复合材料。
22、所述能源系统包括电池组和配电模块,电池组和配电模块密封于所述壳体的两侧玻璃钢材质腔体中。
23、本发明具有以下有益效果及优点:
24、1.本发明能够对内河和景观等的水面漂浮物进行实时监控、多目标识别及自主收集,获取水面污染物图像及视频信息并可通过无线网络回传监控中心,具有重要的实用意义和工程应用价值。
25、2.本发明通过艏部及侧向搭载的超声波测距传感器可自主规避岸边、桥墩等水面障碍物,提升自身的自主避障能力,最大限度地保护水面机器人的作业安全性。
26、3.本发明采用功能模块化设计理念,水面机器人的组部件大多采用技术固化的货架产品和已有成熟的自研装置,便于水面机器人的组部件级和系统级的快速维护和保障。
27、4.本发明具有人在回路遥控和无人自主控制两种模式自由切换功能,能显著提高水面机器人在不确定复杂水面环境的适应性和执行任务的可靠性。
技术特征:
1.一种水面漂浮物智能识别与收集机器人,其特征在于,包括:
2.根据权利要求1所述的水面漂浮物智能识别与收集机器人,其特征在于,所述漂浮物滚动收集系统(3)包括三角履带传输机构、电机(302)及传动皮带(303),其中三角履带传输机构设置于所述壳体(1)的前端开口处,且尖端朝前;电机(302)设置于三角履带传输机构的内侧且通过传动皮带(303)与三角履带传输机构传动连接,电机(302)驱动三角履带传输机构向所述壳体(1)的内侧旋转,从而将漂浮于水面上的漂浮物收集至所述壳体(1)内。
3.根据权利要求2所述的水面漂浮物智能识别与收集机器人,其特征在于,所述三角履带传输机构包括履带(301)和用于支撑履带(301)的三个滚轮(304),其中两个滚轮(304)前后布置于底部,第三个滚轮(304)位于底部后侧滚轮(304)的上方,三个滚轮(304)的两端均与所述壳体(1)转动连接;所述传动皮带(303)与一滚轮(304)传动连接。
4.根据权利要求3所述的水面漂浮物智能识别与收集机器人,其特征在于,所述履带(301)的外表面间隔设有多组刺爪,通过刺爪勾取水面漂浮物。
5.根据权利要求1所述的水面漂浮物智能识别与收集机器人,其特征在于,所述光学探测系统(2)包括双目视觉传感器(201)和光源(202),其中双目视觉传感器(201)设置于壳体(1)的艏部顶面中间位置,双目视觉传感器(201)用于拍摄水面图像;光源(202)设置于双目视觉传感器(201)的一侧,用于辅助双目视觉传感器(201)拍摄图像时进行补光。
6.根据权利要求1所述的水面漂浮物智能识别与收集机器人,其特征在于,所述控制导航系统(4)包括自动驾驶舱(401)及均与自动驾驶舱(401)连接的侧向超声波测距传感器(402)、艏向超声波测距传感器(403)及差分定位装置(404),其中自动驾驶舱(401)设置于所述壳体(1)的艏部,侧向超声波测距传感器(402)设置于所述壳体(1)的左右两侧,用于测量所述壳体(1)侧向距障碍物的距离,并传送给自动驾驶舱(401);
7.根据权利要求1所述的水面漂浮物智能识别与收集机器人,其特征在于,所述推进系统(5)包括设置于所述壳体(1)艉部两侧的左推进器(501)和右推进器(502),左推进器(501)和右推进器(502)分别采用独立电机进行控制,且左推进器(501)和右推进器(502)通过差动提供水平面的转动力矩,驱动水面漂浮物智能识别与收集机器人转向。
8.根据权利要求1所述的水面漂浮物智能识别与收集机器人,其特征在于,所述通信系统(7)包括示位频闪灯和无线网络天线(701)和无线电天线(702)。
9.根据权利要求1所述的水面漂浮物智能识别与收集机器人,其特征在于,所述壳体(1)为方形笼式结构,左右两侧为密封的玻璃钢材质腔体,所述壳体(1)的下底板和后面板采用镂空高分子复合材料。
10.根据权利要求9所述的水面漂浮物智能识别与收集机器人,其特征在于,所述能源系统(6)包括电池组和配电模块,电池组和配电模块密封于所述壳体(1)的两侧玻璃钢材质腔体中。
技术总结
本发明属于水面机器人技术领域,具体地说是一种水面漂浮物智能识别与收集机器人。包括壳体、光学探测系统、漂浮物滚动收集系统、控制导航系统、推进系统、能源系统及通信系统,其中壳体的前端开口;光学探测系统设置于壳体的艏部顶面;漂浮物滚动收集系统设置于壳体的前端开口处;控制导航系统设置于壳体的外侧;推进系统设置于壳体的后端;能源系统设置于壳体上;通信系统设置于壳体的顶部。本发明具有人在回路遥控和无人自主控制两种模式自由切换功能,能够实现水面漂浮物的多目标识别、自主规划控制航行至目标点、自动收集作业功能,为生态环境保护提供了一种智能化、无人化、网络化监测和作业的实用化技术手段。
技术研发人员:姜志斌,赵红印,李良,汪海林
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!