一种具有回收功能的水下机器人系统
本发明涉及水下机器人,具体来说,是一种具有回收功能的水下机器人系统。
背景技术:
1、目前,现有技术存在水下机器人的回收通过船艇操作人员手动挂缆绳,或者使用缆枪将回收缆绳与水下机器人挂接来进行回收,出现了回收效率低的问题。
2、现有技术中公开了公开号为cn111232162a的发明专利申请,名称是“对接装置和水下机器人回收设备”,其公开了一种对接装置和水下机器人回收设备。其中,对接装置包括被动接头组件,所述被动接头组件用以与待回收机器人连接;主动接头组件,所述主动接头组件设有供所述被动接头组件插入的对接区,所述主动接头组件可限位固定位于所述对接区的所述被动接头组件;以及驱动件,所述驱动件连接于所述主动接头组件,所述驱动件驱动所述主动接头组件靠近所述被动接头组件,以使所述被动接头组件插入所述对接区。
3、以上述现有技术的文件为例,在水下定位的过程中,回收装置的活动单元要主动对接机器人主体上侧,但是活动单元在水中运动时往往会存在定位困难的问题,不能将活动单元准确引导至机器人主体上侧的对接位置。
技术实现思路
1、本发明的目的是提供一种具有回收功能的水下机器人系统,以解决现有技术中存在的问题。
2、本发明的目的是这样实现的:一种具有回收功能的水下机器人系统,包括运动机构和固定连接于机器人主体上侧的锁定配合部件;
3、所述运动机构包括:
4、数根与船舶的卷收设备相连的钢缆;
5、主体外壳,其设有容纳机器人主体的电缆活动贯穿的电缆穿过孔;
6、安装于主体外壳上的锁定件,所述钢缆牵引连接锁定件;
7、数个环绕电缆的、安装于主体外壳中的驱动单元,每个驱动单元均包括安装于主体外壳中的导向电机,以及导向轮,所述导向轮套装于导向电机的输出端,所述导向轮在导向电机的驱动下沿电缆的长度方向与电缆表面滚动配合;
8、其中,在所述主体外壳与锁定配合部件接合时,所述锁定件与锁定配合部件锁定配合,以使所述运动机构与机器人主体固定靠合为一个整体。
9、进一步地,所述主体外壳的外侧壁连接有定位棒,所述定位棒设为滚动体;
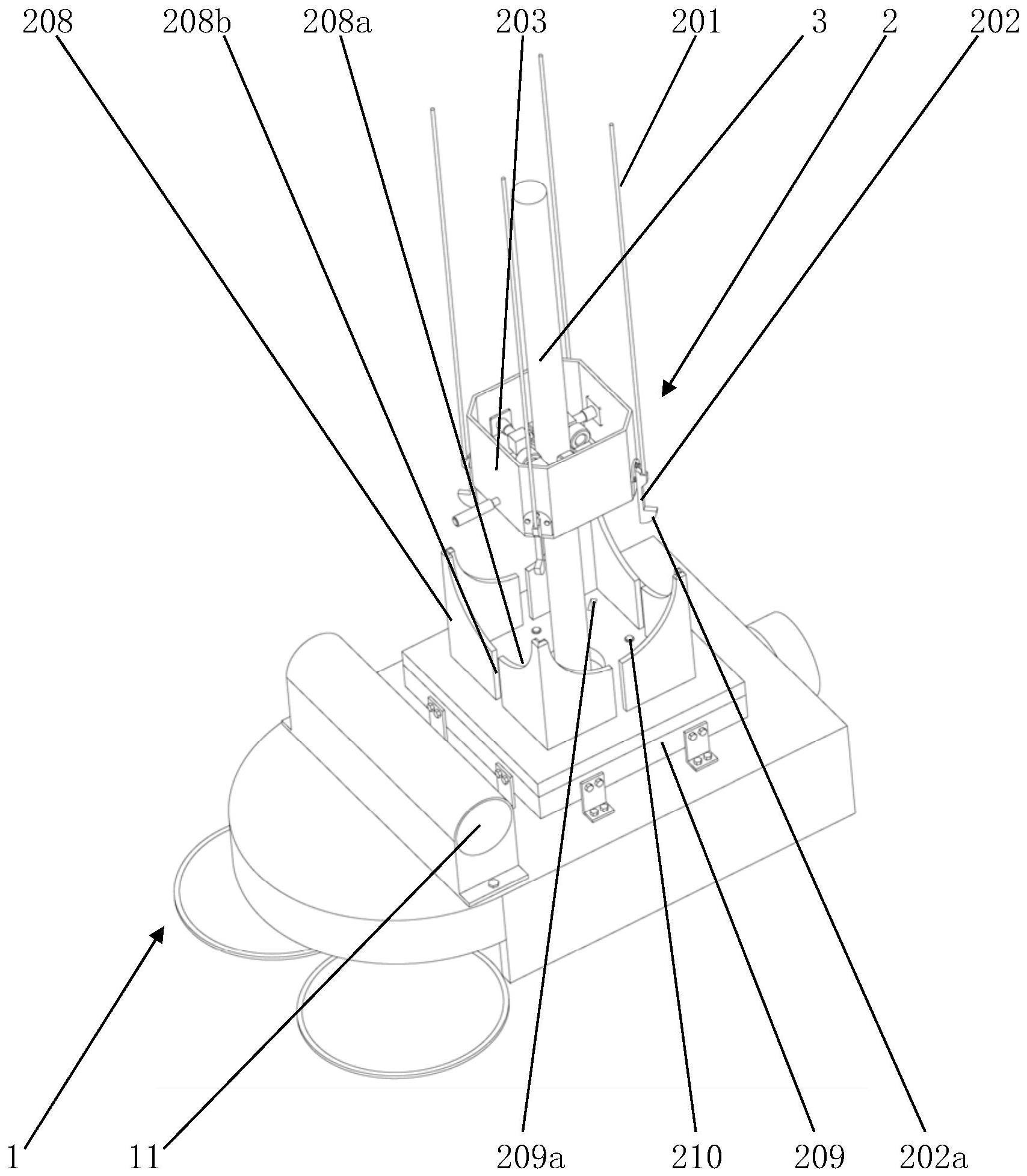
10、所述锁定配合部件包括连接锁座,所述连接锁座整体为盒状,且其上侧为开口结构,电缆从连接锁座内向上活动穿出,在所述主体外壳与锁定配合部件接合时,所述主体外壳处于连接锁座之内;
11、所述连接锁座的侧壁开设有数个条形的、上端为开口的、环绕电缆的连接锁定位槽,在所述主体外壳与锁定配合部件接合时,所述定位棒插配其中一个连接锁定位槽。
12、进一步地,每个连接锁定位槽均对应配置有两个相对地处于连接锁座上边缘的引导边,所述引导边设为下凹的圆弧形,所述引导边的最低端与连接锁定位槽的上端相接,所述引导边用于与所述定位棒滚动接触以引导定位棒移动到连接锁定位槽上端。
13、进一步地,所述主体外壳的锁定件设有数个,所有锁定件环绕电缆布置,并处于主体外壳的外侧壁;
14、每个锁定件设为锁杆,所述锁杆部分地向下超出主体外壳的底侧,所述锁杆下端设有侧向凸出的锁钩;
15、所述锁定配合部件包括锁盘和驱使锁盘旋转的电动驱动器,所述锁盘上开设有贯通的锁孔,且所述锁孔具有锁配进入孔和弧形孔,在锁定件与锁定配合部件锁定配合时,所述锁杆的锁钩活动贯穿锁配进入孔,并随锁盘的转动,使得所述锁杆移动到弧形孔内,以使锁钩勾住锁盘。
16、本发明的有益效果在于:
17、该回收装置的运动机构可顺着水下机器人的电缆在水下寻找水下机器人,利用定位棒以及连接锁座的特殊结构,可以引导锁定件精准进入锁盘的锁孔内;将钢缆牵引连接锁定件,以便更好地对水下清洗机器人进行回收。
技术特征:
1.一种具有回收功能的水下机器人系统,其特征在于,包括运动机构和固定连接于机器人主体(1)上侧的锁定配合部件;
2.根据权利要求1所述的一种具有回收功能的水下机器人系统,其特征在于:所述主体外壳(203)的外侧壁连接有定位棒(207),所述定位棒(207)设为滚动体;
3.根据权利要求2所述的一种具有回收功能的水下机器人系统,其特征在于:每个连接锁定位槽(208b)均对应配置有两个相对地处于连接锁座(208)上边缘的引导边(208a),所述引导边(208a)设为下凹的圆弧形,所述引导边(208a)的最低端与连接锁定位槽(208b)的上端相接,所述引导边(208a)用于与所述定位棒(207)滚动接触以引导定位棒(207)移动到连接锁定位槽(208b)上端。
4.根据权利要求3所述的一种具有回收功能的水下机器人系统,其特征在于:所述主体外壳(203)的锁定件设有数个,所有锁定件环绕电缆(3)布置,并处于主体外壳(203)的外侧壁;
5.根据权利要求4所述的一种具有回收功能的水下机器人系统,其特征在于:所述电动驱动器设为齿轮电机(211),所述锁盘(213)设有与其旋转中心轴同轴的内圆孔,且在该内圆孔中设有圆弧形齿边(214),所述齿轮电机(211)的输出端套设有齿轮(212),所述齿轮电机(211)、齿轮(212)均处于锁盘(213)的内圆孔中,所述齿轮(212)与锁盘(213)内圆孔的圆弧形齿边(214)啮合,用于驱使所述锁杆(202)从锁配进入孔(213a)移动到弧形孔(213b)内。
6.根据权利要求4所述的一种具有回收功能的水下机器人系统,其特征在于:还包括上部锁定座(209),所述上部锁定座(209)固定安装于机器人主体(1)上侧;
7.根据权利要求6所述的一种具有回收功能的水下机器人系统,其特征在于:所述上部锁定座(209)的顶部连接有数个处于连接锁座(208)之内的氮气弹簧(210),在所述主体外壳(203)与锁定配合部件接合时,所述主体外壳(203)的底部抵触氮气弹簧(210)。
技术总结
本发明公开了一种具有回收功能的水下机器人系统,包括运动机构和锁定配合部件;运动机构包括:数根与船舶的卷收设备相连的钢缆;主体外壳,其设有容纳电缆活动贯穿的电缆穿过孔;安装于主体外壳上的锁定件,钢缆牵引连接锁定件;数个环绕电缆的、安装于主体外壳中的驱动单元,每个驱动单元均包括导向电机和导向轮,导向轮在导向电机的驱动下沿电缆滚动;其中,在主体外壳与锁定配合部件接合时,锁定件与锁定配合部件锁定配合,以使运动机构与机器人主体固定靠合为一个整体。采用本发明的方案,使得回收装置的运动机构可顺着水下机器人的电缆在水下顺利地对接水下机器人,以便回收水下机器人。
技术研发人员:王斌,彭宝龙,许竞翔,沈勤
受保护的技术使用者:上海海洋大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!