可重构仿生机器鱼和组合仿生鱼
本发明涉及水下仿生机器人,尤其涉及一种可重构仿生机器鱼和组合仿生鱼。
背景技术:
1、目前,已有仿生机器鱼主要依靠复杂的机械结构设计来现水下多模态运动,即现有的仿生机器鱼要实现多运动度的灵活运动,需要依靠多种驱动部件协同作用才能够实现,但复杂的机构设计一方面增大了机器鱼的整体尺寸,使其难以执行狭窄场景下的作业任务,另一方面增加了机器鱼的维护及复用等成本;而如果采用功能较为单一的机器鱼,虽然这种功能较为单一的机器鱼得益于其功能单一使得其体积也能够做到更小,因此能够满足一些狭窄实用场景的需求,但其功能单一就导致了其灵活性较差,无法实现多运动度的灵活运动,因此在需要多运动度灵活运动的场景无法满足该场景的使用需求。
2、鉴于此,有必要提供一种新的可重构仿生机器鱼和组合仿生鱼,以解决或至少缓解上述技术缺陷。
技术实现思路
1、本发明的主要目的是提供一种可重构仿生机器鱼和组合仿生鱼,旨在解决现有机器鱼难以兼顾运动灵活性和满足狭窄使用场景需求的技术问题。
2、为了实现上述目的,本发明提供一种可重构仿生机器鱼,所述可重构仿生机器鱼包括:
3、主体机构,所述主体机构包括相互连接的密封外壳和电控永磁铁装置,所述电控永磁铁装置包括充磁状态和消磁状态;
4、尾部机构,所述尾部机构用以带动所述密封外壳移动。
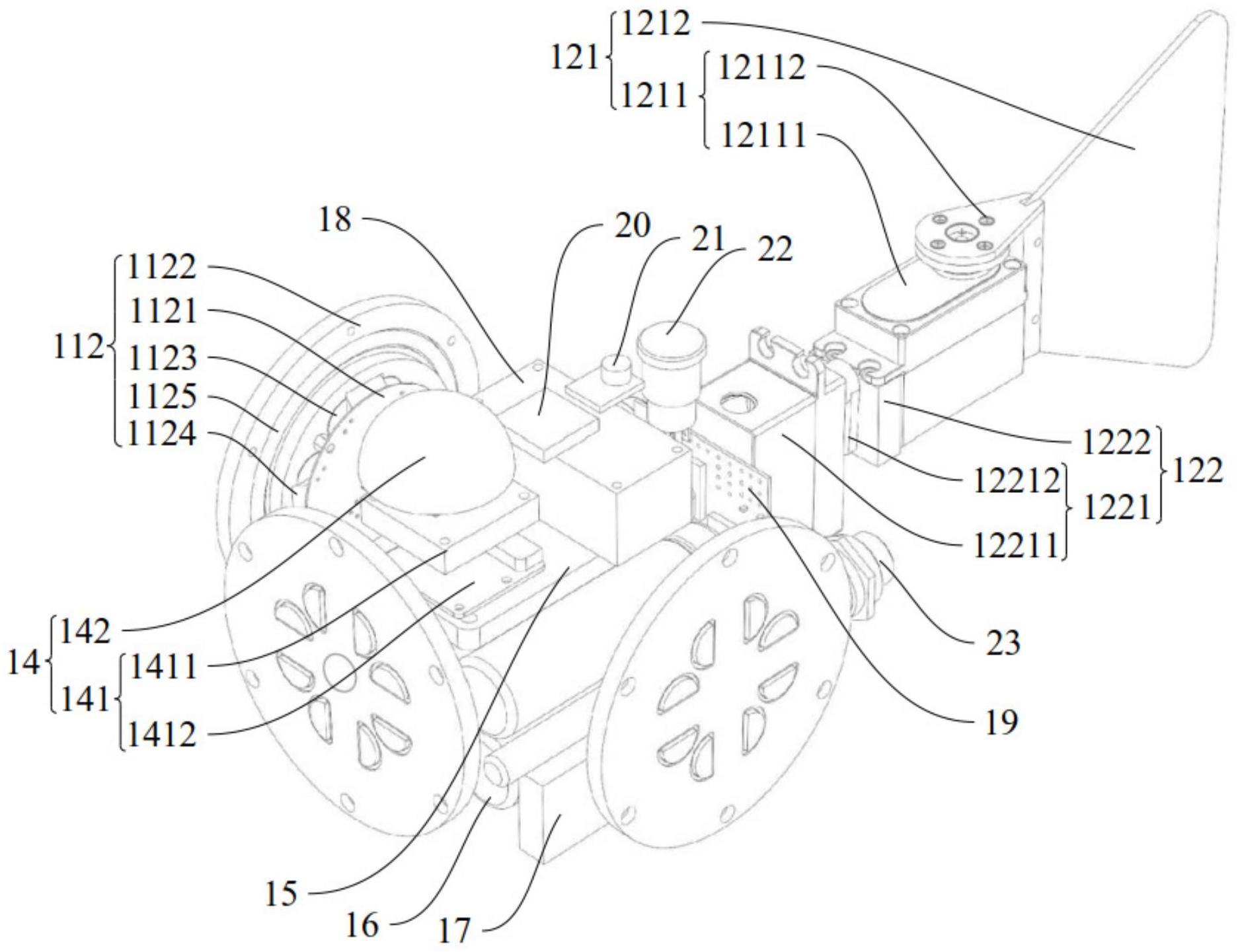
5、在一实施例中,所述尾部机构包括尾部和腰部,所述尾部包括尾鳍驱动组件和尾鳍,所述尾鳍驱动组件与所述尾鳍连接用以驱动所述尾鳍摆动,所述尾鳍驱动组件用以通过所述腰部与所述密封外壳连接。
6、在一实施例中,所述腰部包括相互连接的腰部驱动组件和腰部连接件,所述腰部驱动组件用于驱动所述腰部连接件转动,所述腰部连接件与所述尾鳍驱动组件连接。
7、在一实施例中,所述腰部连接件的转轴与所述尾鳍的转轴垂直设置。
8、在一实施例中,所述电控永磁铁装置的数量为多个,所述密封外壳设置有多个安装面,各所述安装面均安装有所述电控永磁铁装置。
9、在一实施例中,所述电控永磁铁装置包括吸盘电路板、吸盘外壳,永磁铁组件、吸盘线圈和密封圈,所述永磁铁组件与所述吸盘外壳连接,所述吸盘线圈与所述吸盘电路板电连接,所述吸盘线圈绕设在所述永磁铁组件的外围,所述吸盘外壳安装于所述安装面,所述安装面开设有供所述吸盘外壳的外侧面外露的第一通孔,所述吸盘电路板、所述吸盘线圈和所述密封圈均位于所述密封外壳内,所述密封圈与所述吸盘外壳连接,用以防止水进入所述密封外壳内;所述吸盘电路板能够通过所述吸盘线圈控制所述永磁铁组件在所述充磁状态和所述消磁状态之间切换。
10、在一实施例中,所述可重构仿生机器鱼还包括视觉识别机构,所述视觉识别机构设置于所述密封壳体内并与一所述吸盘外壳连接,所述吸盘外壳开设有供所述视觉识别机构的镜头外露的第二通孔。
11、在一实施例中,所述永磁铁组件的数量为多个,所述吸盘线圈与所述永磁铁组件数量一致且一一对应设置,以使所述吸盘电路板能够单独控制任一所述永磁铁组件在所述充磁状态和所述消磁状态之间切换。
12、在一实施例中,所述可重构仿生机器鱼包括图像采集机构,所述图像采集机构包括图像采集组件和防水护罩,所述图像采集组件包括图像采集件和与所述图像采集件电连接的图像采集主控单元,所述图像采集件位于所述防水护罩内,所述密封外壳开设有供所述防水护罩的部分本体伸出的观测孔。
13、此外,本发明还提供一种组合仿生鱼,所述组合仿生鱼包括至少两个上述可重构仿生机器鱼,任意两个所述可重构仿生机器鱼均能够通过所述电控永磁铁装置连接或分离。
14、本发明的上述技术方案中,尾部机构能够带动主体机构实现至少一自由度的运动,即尾部机构至少能够带动主体机构沿某一方向进行移动,由于主体机构包括密封外壳和电控永磁铁装置,因此当电控永磁铁装置处于充磁状态时,可以通过电控永磁铁装置与其他可重构仿生机器鱼连接或与其他驱动部件连接,以使拼接完成后的结构能够实现多运动方向的灵活运动;当面对狭窄使用环境时,可控制电控永磁铁装置处于消磁状态,从而解除与电控永磁铁装置通过磁性连接的部件,进而使可重构仿生机器鱼恢复至原有大小,以适应狭窄环境的使用需求。
技术特征:
1.一种可重构仿生机器鱼,其特征在于,包括:
2.根据权利要求1所述的可重构仿生机器鱼,其特征在于,所述尾部机构包括尾部和腰部,所述尾部包括尾鳍驱动组件和尾鳍,所述尾鳍驱动组件与所述尾鳍连接用以驱动所述尾鳍摆动,所述尾鳍驱动组件用以通过所述腰部与所述密封外壳连接。
3.根据权利要求2所述的可重构仿生机器鱼,其特征在于,所述腰部包括相互连接的腰部驱动组件和腰部连接件,所述腰部驱动组件用于驱动所述腰部连接件转动,所述腰部连接件与所述尾鳍驱动组件连接。
4.根据权利要求3所述的可重构仿生机器鱼,其特征在于,所述腰部连接件的转轴与所述尾鳍的转轴垂直设置。
5.根据权利要求1~4中任意一项所述的可重构仿生机器鱼,其特征在于,所述电控永磁铁装置的数量为多个,所述密封外壳设置有多个安装面,各所述安装面均安装有所述电控永磁铁装置。
6.根据权利要求5所述的可重构仿生机器鱼,其特征在于,所述电控永磁铁装置包括吸盘电路板、吸盘外壳,永磁铁组件、吸盘线圈和密封圈,所述永磁铁组件与所述吸盘外壳连接,所述吸盘线圈与所述吸盘电路板电连接,所述吸盘线圈绕设在所述永磁铁组件的外围,所述吸盘外壳安装于所述安装面,所述安装面开设有供所述吸盘外壳的外侧面外露的第一通孔,所述吸盘电路板、所述吸盘线圈和所述密封圈均位于所述密封外壳内,所述密封圈与所述吸盘外壳连接,用以防止水进入所述密封外壳内;所述吸盘电路板能够通过所述吸盘线圈控制所述永磁铁组件在所述充磁状态和所述消磁状态之间切换。
7.根据权利要求6所述的可重构仿生机器鱼,其特征在于,所述可重构仿生机器鱼还包括视觉识别机构,所述视觉识别机构设置于所述密封壳体内并与一所述吸盘外壳连接,所述吸盘外壳开设有供所述视觉识别机构的镜头外露的第二通孔。
8.根据权利要求6所述的可重构仿生机器鱼,其特征在于,所述永磁铁组件的数量为多个,所述吸盘线圈与所述永磁铁组件数量一致且一一对应设置,以使所述吸盘电路板能够单独控制任一所述永磁铁组件在所述充磁状态和所述消磁状态之间切换。
9.根据权利要求1~4中任意一项所述的可重构仿生机器鱼,其特征在于,所述可重构仿生机器鱼包括图像采集机构,所述图像采集机构包括图像采集组件和防水护罩,所述图像采集组件包括图像采集件和与所述图像采集件电连接的图像采集主控单元,所述图像采集件位于所述防水护罩内,所述密封外壳开设有供所述防水护罩的部分本体伸出的观测孔。
10.一种组合仿生鱼,其特征在于,所述组合仿生鱼包括至少两个权利要求1~9中任一项所述可重构仿生机器鱼,任意两个所述可重构仿生机器鱼均能够通过所述电控永磁铁装置连接或分离。
技术总结
本发明公开了一种可重构仿生机器鱼和组合仿生鱼,该可重构仿生机器鱼包括主体机构和尾部机构,主体机构包括相互连接的密封外壳和电控永磁铁装置,电控永磁铁装置包括充磁状态和消磁状态;尾部机构用以带动密封外壳移动。尾部机构能够带动主体机构实现至少一自由度的运动,当电控永磁铁装置处于充磁状态时,可以通过电控永磁铁装置与其他可重构仿生机器鱼连接或与其他驱动部件连接,以使拼接完成后的结构能够实现多运动方向的灵活运动;当面对狭窄使用环境时,可控制电控永磁铁装置处于消磁状态,从而解除与电控永磁铁装置通过磁性连接的部件,进而使可重构仿生机器鱼恢复至原有大小,以适应狭窄环境的使用需求。
技术研发人员:喻俊志,孟岩,孔诗涵,陈迪,罗奥成
受保护的技术使用者:北京大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!