一种用于公路桥梁水下墩柱检测的环抱爬行机器人及方法
本发明涉及水下巡检运维机器人,具体涉及一种适用于公路桥梁水下墩柱清洗与检测机器人及方法。
背景技术:
1、我国公路桥梁量大面广,其中服役年限超20年的占比不断变高,公路桥梁大规模管养需求逐渐旺盛。然而,作为桥梁结构的重要组成部分,水下墩柱的服役安全非常重要,但目前尚无技术手段管理养护公路桥梁水下墩柱,理论研究、技术标准、产品装备极度缺乏,严重制约了我国桥梁科学化管理养护的发展。因此,开展公路桥梁水下墩柱管养关键技术研究,对推动我国交通基础设施可持续转型升级、加快交通强国建设具有重大的经济和社会意义。
2、传统的桥梁水下墩柱检测及评估以人工为主,存在风险大、效率低、精度差问题:(2)水下墩柱人工清刷难度大、成本高、效率低,难以满足量大面广的清洗需求;(1)水下墩柱人工检测风险大、耗时长,高速、浑浊水流等复杂环境下水下检测实施困难。研制具有清洗,检测与评估等自动化仪器装备是克服水下人工检测难题的必要途径。
3、水下机器人可长时间长距离的工作,但是目前桥梁水下机器人基本以无人遥控潜水器进行检测为主,无法进行桥墩清洗任务,且水下水流速度可达到2节以上,在此高速、浑浊水流条件下,现有机器人难以满足公路桥梁管理养护需求,而桥梁水下抱柱式机器人更加稳定可靠。
4、综上所述,针对公路桥梁水下墩柱,国内外尚无满足清洗与检测一体化装备成熟先例,智能检测系统仍属空白。因此需要一种可同时清洗与检测的智能水下机器人。
技术实现思路
1、针对现有技术存在的缺陷,本发明提出了一种适用于公路桥梁水下墩柱检测的环抱爬行机器人及方法。
2、本发明技术方案是:
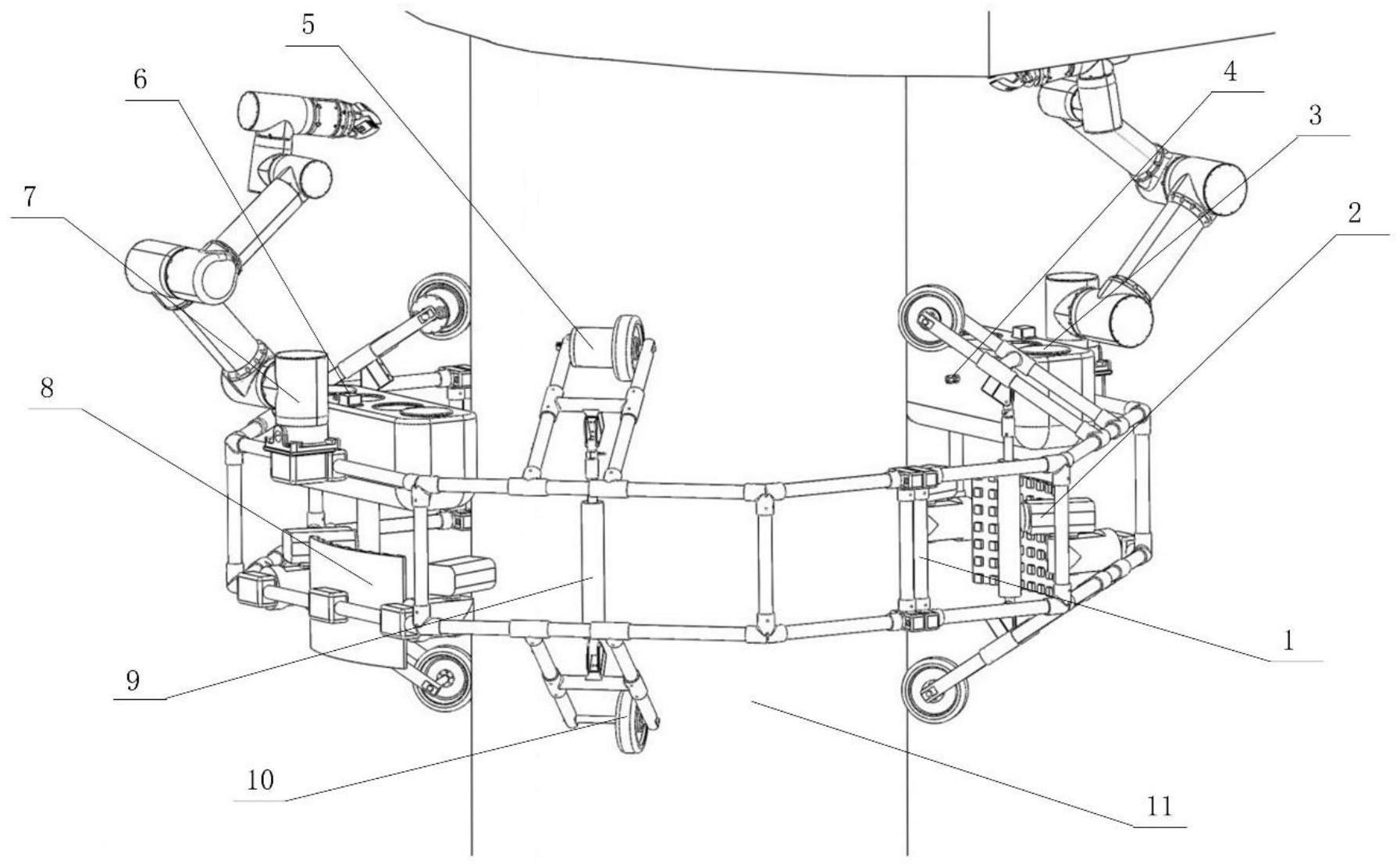
3、一种用于公路桥梁水下墩柱检测的环抱爬行机器人,包括机身本体、水下照明系统、工具仓、深度计量模块、伺服动力系统、倾角测量模块、水下作业机械臂、阵列视觉模块、同步拉伸固定系统和从动轮;所述机身本体采用双组合八边形镂空框架结构设计,用于固定于公路桥梁水下墩柱并减小高速水流造成的阻力,同时机身本体由碳纤维管组成,强度高且重量轻;各执行器及传感器通过机身结构进行动力传送及通信传输;所述伺服动力系统共有四组,沿圆周方向均匀分布于机身本体上端,用以提供爬行公路桥梁水下墩柱的动力,伺服动力系统包含接线盖、伺服电机、电机防水套筒、止口、静连轴、轮胎和动连轴,所述从动轮共有四组,沿圆周方向均匀分布于机身本体下端,且每一组从动轮与一组伺服动力系统上下对应,并分别通过摆动架与机身本体转动连接;所述同步拉伸固定系统由防水笔式电动拉杆和水下拉力传感器组成,将上下对应的伺服动力系统和从动轮的摆动架内侧相连并提供同步拉力,所提供的同步拉力将每一组伺服动力系统的轮胎及从动轮紧密挤压在公路桥梁水下墩柱面上,达到机器人稳定环抱桥梁并固定的目的。
4、作为本发明的进一步改进,所述阵列视觉模块共两组位于机身本体下侧,由水下摄像头阵列组合,提供全视角视觉信息,用于检测公路桥梁水下墩柱病害以及视觉传输;水下照明系统共四组位于阵列视觉模块两侧,在浑浊水环境下提供视觉光照条件;深度计量模块安装在工具仓外壁中心位置,采集水位深度信息;倾角测量模块安装在工具仓上壁靠近水下作业机械臂一侧,提供机器人姿态信息,姿态信息用于机器人防偏转控制。
5、作为本发明的进一步改进,两组水下作业机械臂对称分布于机身本体上侧;工具仓安装在水下作业机械臂同边内侧,工具仓包含圆筒形舱室、盖板和盖板槽,装有清洗作业工具,水下作业机械臂末端安装夹爪,水下作业机械臂在工具仓内抓取作业工具。
6、用于公路桥梁水下墩柱检测的环抱爬行机器人的检测方法,包括以下步骤:
7、s1、操作人员在水面搭载平台将机器人双侧结构组合成八边形形态,通过线缆遥控防水笔式电动拉杆,使机器人的四个轮胎和四个从动轮贴紧公路桥梁水下墩柱,直到机器人不受重力影响而向下滑动为止;
8、s2、操作人员通过线缆遥控开启伺服动力系统、深度计量模块、倾角测量模块、阵列视觉模块和水下照明系统,设定参数后,准备开始清洗作业;机器人在爬行过程中,倾角测量模块始终采集机器人姿态信息;机器人控制器利用姿态信息控制俯仰角,滚动角,使机器人始终处于稳定平衡状态;
9、s3、机器人到达合适深度后,使两侧水下作业机械臂,进行清洗任务;打开工具仓的盖板,两侧水下作业机械臂从工具仓内夹取高压水枪作业工具;水下作业机械臂取出高压水枪后,盖板关闭;盖板关闭后使能伺服动力系统,机器人沿水下墩柱向下爬行,爬行过程中,两组高压水枪完整地冲洗公路桥梁水下墩柱;当机器人到达水底时,公路桥梁水下墩柱冲洗任务完成,水下作业机械臂将高压水枪放回工具仓;
10、s4、机器人放回高压水枪后,从工具仓抓取钢刷作业工具,进行刷洗任务;盖板关闭后使能伺服动力系统,机器人沿水下墩柱向上爬行,爬行过程中,两组钢刷完整地刷洗公路桥梁水下墩柱;当机器人回到水面时,公路桥梁水下墩柱清洗任务完成,水下作业机械臂将钢刷放回工具仓;
11、s5、清洗作业结束后,机器人回到水面位置,开始检测作业;阵列视觉模块抵近公路桥梁水下墩柱进行视觉检测,并将视觉信息回传到地面站;同时,水下照明系统调整角度,以提供合适的视觉条件;机器人由上向下缓慢爬行,当检测到公路桥梁水下墩柱病害时,阵列视觉模块自动识别病害类别,深度计量模块记录病害水下深度信息,并将病害信息和深度信息回传到地面站。机器人完成检测任务后返回水面。
12、本发明的有益效果:
13、本发明的用于公路桥梁水下墩柱检测的环抱爬行机器人及方法,实现机器人水下清洗作业,以及桥梁水下墩柱典型病害的自动化检测。可在高速、浑浊水流条件下对公路桥梁水下墩柱进行维护,有效提高桥梁水下病害处置效率。
技术特征:
1.一种用于公路桥梁水下墩柱检测的环抱爬行机器人,其特征在于:包括机身本体(1)、水下照明系统(2)、工具仓(3)、深度计量模块(4)、伺服动力系统(5)、倾角测量模块(6)、水下作业机械臂(7)、阵列视觉模块(8)、同步拉伸固定系统(9)和从动轮(10);所述机身本体(1)采用双组合八边形镂空框架结构设计,用于固定于公路桥梁水下墩柱并减小高速水流造成的阻力,同时机身本体(1)由碳纤维管组成,强度高且重量轻;各执行器及传感器通过机身结构进行动力传送及通信传输;所述伺服动力系统(5)共有四组,沿圆周方向均匀分布于机身本体(1)上端,用以提供爬行公路桥梁水下墩柱的动力,伺服动力系统(5)包含接线盖(51)、伺服电机(52)、电机防水套筒(53)、止口(54)、静连轴(55)、轮胎(56)和动连轴(57),所述从动轮(10)共有四组,沿圆周方向均匀分布于机身本体(1)下端,且每一组从动轮(10)与一组伺服动力系统(5)上下对应,并分别通过摆动架与机身本体(1)转动连接;所述同步拉伸固定系统(9)由防水笔式电动拉杆(91)和水下拉力传感器(92)组成,将上下对应的伺服动力系统(5)和从动轮(10)的摆动架内侧相连并提供同步拉力,所提供的同步拉力将每一组伺服动力系统(5)的轮胎(56)及从动轮(10)紧密挤压在公路桥梁水下墩柱面上,达到机器人稳定环抱桥梁并固定的目的。
2.根据权利要求1所述的一种用于公路桥梁水下墩柱检测的环抱爬行机器人,其特征在于:所述阵列视觉模块8共两组位于机身本体(1)下侧,由水下摄像头阵列组合,提供全视角视觉信息,用于检测公路桥梁水下墩柱病害以及视觉传输;水下照明系统(2)共四组位于阵列视觉模块(8)两侧,在浑浊水环境下提供视觉光照条件;深度计量模块(4)安装在工具仓(3)外壁中心位置,采集水位深度信息;倾角测量模块(6)安装在工具仓(3)上壁靠近水下作业机械臂(7)一侧,提供机器人姿态信息,姿态信息用于机器人防偏转控制。
3.根据权利要求1所述的一种用于公路桥梁水下墩柱检测的环抱爬行机器人,其特征在于:两组水下作业机械臂(7)对称分布于机身本体(1)上侧;工具仓(3)安装在水下作业机械臂(7)同边内侧,工具仓(3)包含圆筒形舱室(31)、盖板(32)和盖板槽(33),装有清洗作业工具,水下作业机械臂(7)末端安装夹爪,水下作业机械臂(7)在工具仓(3)内抓取作业工具。
4.根据权利要求1至3中的任一项所述的用于公路桥梁水下墩柱检测的环抱爬行机器人的检测方法,其特征在于:包括以下步骤:
技术总结
本发明公开了一种用于公路桥梁水下墩柱检测的环抱爬行机器人及方法。本发明主要用于公路桥梁工程中的水下墩柱的一体化养护管理。该机器人包括机身本体、水下照明系统、工具仓、深度计量模块、伺服动力系统、倾角测量模块、水下作业机械臂、阵列视觉模块、同步拉伸固定系统、从动轮。机器人具有环抱公路桥梁墩柱爬行的特点,可稳定运行于水下环境。机器人在清刷水下墩柱表面附着物后,进行病害视觉检测;在确定病害类别及定位信息后,进行病害信息回传。此检测机器人可在高速、浑浊水流情况下,环抱公路桥梁水下墩柱稳定爬行于任意深度并感知深度信息及视觉信息,达到公路桥梁水下墩柱病害检测的目的,可用于公路桥梁水下墩柱的维护。
技术研发人员:宋光明,谢峰,毛巨正,王飞,周俊,宋爱国,吴刚
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!