自主式高速抗流落水人员救助设备及其控制方法
本发明涉及水下机器人,尤其是一种自主式高速抗流落水人员救助设备及其控制方法。
背景技术:
1、随着海上交通的发展,海上事故时有发生。海上救援应急和海上安全救助是一项重要人任务。目前,海上救生装备主要有救生艇、救助艇、气胀式救生阀、救生圈、救生服、抗暴露服、抛绳设备、视觉信号设备、无线电设备、海上撤离系统等,这些装备能给予海难后船员的一定自救能力和等待救援的时间。但对于落水后失去意识的伤员及无法登上救生艇救生筏的落水者,这些救援设备无法及时起到救援效果。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种自主式高速抗流落水人员救助设备及其控制方法,能够在多种场景下及时进行救援工作。
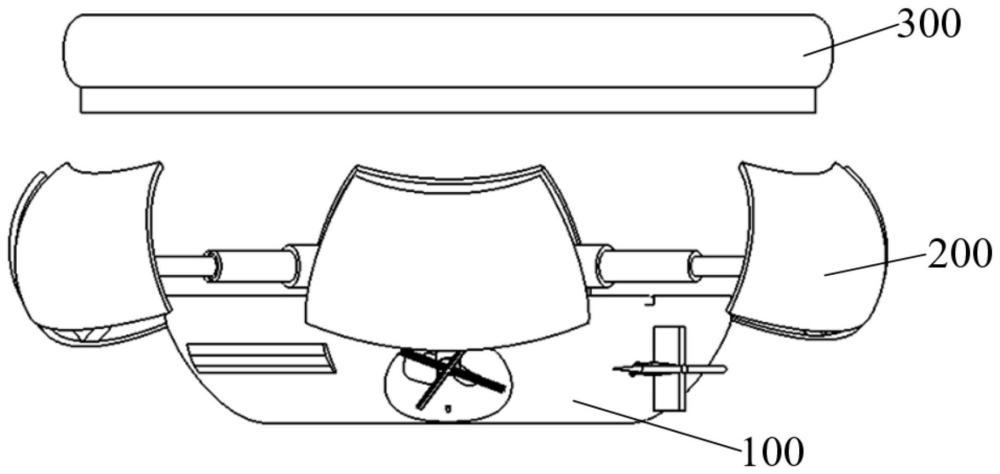
2、一方面,本发明实施例提供了一种自主式高速抗流落水人员救助设备,包括:
3、自主式高速抗流水下航行器,所述自主式高速抗流水下航行器包括电子舱模块、信息交换模块、通讯模块和推进模块;所述电子舱模块包括电池组件和中央集线器组件,所述电池组件用于向所述救助设备提供工作电源,所述中央集线器组件通过所述通讯模块与遥控终端交互;所述信息交换模块包括多波束声呐和图像采集组件;
4、水下折叠气囊展开装置,所述水下折叠气囊展开装置与所述自主式高速抗流水下航行器固定连接;
5、气囊,所述气囊的充气口与所述水下折叠气囊展开装置连接;
6、其中,中央集线器组件用于执行以下步骤:
7、当接收到遥控终端发送的控制指令,根据所述控制指令控制所述多波束声呐实时检测落水对象的落水位置;
8、根据所述落水位置控制所述推进模块进入工作状态,以通过所述推进模块控制所述救助设备向所述落水位置前进;
9、控制所述图像采集组件实时采集所述落水对象与所述救助设备的相对位置信息,所述相对位置根据所述救助设备的前进过程实时变化;
10、根据所述相对位置确定所述救助设备位于所述落水对象正下方,控制所述水下折叠气囊展开装置进行工作,以通过所述水下折叠气囊展开装置对所述气囊进行充气后将所述落水对象托离水面。
11、在一些实施例中,所述水下折叠气囊展开装置,包括:
12、电机;
13、伸缩管道,所述电机用于驱动所述伸缩管道的伸缩过程;
14、气体发生器,当所述伸缩管道处于伸展状态,所述中央集线器组件控制所述气体发生器对所述气囊进行充气;当所述伸缩管道从伸展状态到收缩状态,所述中央集线器组件控制所述气体发生器对所述气囊进行放气,以使所述气囊存入所述伸缩管道内。
15、在一些实施例中,所述电子舱模块还包括:
16、运动感检测组件,所述运动感检测组件用于检测所述救助设备在前进过程中的运行状态,以使所述中央集线器组件根据所述运行状态调整所述推进模块的工作状态。
17、在一些实施例中,所述信息交换模块还包括:
18、灯带,所述灯带固定于所述自主式高速抗流水下航行器的外壳表面,与所述中央集线器组件连接,用于显示变化的颜色信息;所述颜色信息用于表征所述救助设备的救助进程。
19、在一些实施例中,所述通讯模块包括单片射频收发组件。
20、在一些实施例中,所述推进模块包括4台推进器,所述4台推进器分别沿x轴和y轴对称分布于所述自主式高速抗流水下航行器外壳上,且所述4台推进器在y轴方向以斜45°分布。
21、另一方面,本发明实施例提供了一种自主式高速抗流落水人员救助设备的控制方法,所述方法应用于上述的自主式高速抗流落水人员救助设备中的中央集线器组件,所述方法包括以下步骤:
22、当接收到遥控终端发送的控制指令,根据所述控制指令控制所述多波束声呐实时检测落水对象的落水位置;
23、根据所述落水位置控制所述推进模块进入工作状态,以通过所述推进模块控制所述救助设备向所述落水位置前进;
24、控制所述图像采集组件实时采集所述落水对象与所述救助设备的相对位置信息,所述相对位置根据所述救助设备的前进过程实时变化;
25、根据所述相对位置确定所述救助设备位于所述落水对象正下方,控制所述水下折叠气囊展开装置进行工作,以通过所述水下折叠气囊展开装置对所述气囊进行充气后将所述落水对象托离水面。
26、在一些实施例中,所述控制所述多波束声呐实时检测落水对象的落水位置,包括:
27、控制多波束声呐向预设方向发射声呐信号;
28、根据所述声呐信号的反馈信息确定所述落水对象的落水位置。
29、在一些实施例中,所述控制所述图像采集组件实时采集所述落水对象与所述救助设备的相对位置信息,包括:
30、控制所述图像采集组件对所述落水位置进行连续多帧实时拍照,得到实时图像;
31、根据所述实时图像分析所述落水对象与所述救助设备的相对位置信息。
32、在一些实施例中,所述根据所述实时图像分析所述落水对象与所述救助设备的相对位置信息,包括:
33、根据所述图像采集组件的双目立体成像原理和所述实时图像分析所述落水对象与所述救助设备的相对位置信息。
34、本发明实施例具有如下有益效果:
35、本实施例通过设置自主式高速抗流水下航行器、水下折叠气囊展开装置和气囊,并在自主式高速抗流水下航行器中设置电子舱模块、信息交换模块、通讯模块和推进模块,在电子舱模块中设置电池组件和中央集线器组件,在信息交换模块中设置多波束声呐和图像采集组件,使得中央集线器组件在接收到遥控终端发送的控制指令后,可以根据控制指令控制多波束声呐实时检测落水对象的落水位置,根据落水位置控制推进模块进入工作状态,以通过推进模块控制救助设备向落水位置前进,同时控制图像采集组件实时采集落水对象与救助设备的相对位置信息,当根据相对位置确定救助设备位于落水对象正下方,控制水下折叠气囊展开装置进行工作,以通过水下折叠气囊展开装置对气囊进行充气后将落水对象托离水面,从而可以对落水人员进行及时救助,也可以对对落水后失去意识的伤员及无法登上救生艇救生筏的落水者进行及时救援,以实现多种场景下的救援工作。
36、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种自主式高速抗流落水人员救助设备,其特征在于,包括:
2.根据权利要求1所述的一种自主式高速抗流落水人员救助设备,其特征在于,所述水下折叠气囊展开装置,包括:
3.根据权利要求1所述的一种自主式高速抗流落水人员救助设备,其特征在于,所述电子舱模块还包括:
4.根据权利要求1所述的一种自主式高速抗流落水人员救助设备,其特征在于,所述信息交换模块还包括:
5.根据权利要求1所述的一种自主式高速抗流落水人员救助设备,其特征在于,所述通讯模块包括单片射频收发组件。
6.根据权利要求1所述的一种自主式高速抗流落水人员救助设备,其特征在于,所述推进模块包括4台推进器,所述4台推进器分别沿x轴和y轴对称分布于所述自主式高速抗流水下航行器外壳上,且所述4台推进器在y轴方向以斜45°分布。
7.一种自主式高速抗流落水人员救助设备的控制方法,其特征在于,所述方法应用于权利要求1-6任一项所述的自主式高速抗流落水人员救助设备中的中央集线器组件,所述方法包括以下步骤:
8.根据权利要求7所述的一种自主式高速抗流落水人员救助设备的控制方法,其特征在于,所述控制所述多波束声呐实时检测落水对象的落水位置,包括:
9.根据权利要求7所述的一种自主式高速抗流落水人员救助设备的控制方法,其特征在于,所述控制所述图像采集组件实时采集所述落水对象与所述救助设备的相对位置信息,包括:
10.根据权利要求9所述的一种自主式高速抗流落水人员救助设备的控制方法,其特征在于,所述根据所述实时图像分析所述落水对象与所述救助设备的相对位置信息,包括:
技术总结
本发明公开了一种自主式高速抗流落水人员救助设备及其控制方法,可广泛应用于水下机器人技术领域。本发明通过中央集线器组件在接收到遥控终端发送的控制指令后,可以根据控制指令控制多波束声呐实时检测落水对象的落水位置,根据落水位置控制推进模块进入工作状态,以通过推进模块控制救助设备向落水位置前进,同时控制图像采集组件实时采集落水对象与救助设备的相对位置信息,当根据相对位置确定救助设备位于落水对象正下方,控制水下折叠气囊展开装置进行工作,以通过水下折叠气囊展开装置对气囊进行充气后将落水对象托离水面,从而可以实现多种场景下的救援工作。
技术研发人员:陈德山,黄婉婷,黄俊杰,魏义,苗鹤曦,杨洋,洪祺林,吴刘梓童
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!