一种海洋无人船装置的制作方法
本发明涉及无人船,具体为一种海洋无人船装置。
背景技术:
1、无人船是一种可以无需遥控,是指无需任何人员在其上操作控制,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面船只,它能够在没有船员的情况下进行任务执行,随着先进的计算机技术和传感器的发展,无人船正在成为各种水上应用场景的重要组成部分。
2、公告号为cn113428302b的发明专利,公开了一种海洋无人船装置,包括两个船体和船板,两个所述船体的顶侧均固定安装有电池箱,所述船板的一侧开设有调节槽孔,两个所述电池箱相互靠近的一侧共同安装有设置在所述调节槽孔内的调节机构,所述调节机构用于调节两个所述船体的间距;所述船板的底侧固定安装有l形架,所述l形架一侧开设有转动槽,所述转动槽的两侧内壁通过下放驱动机构安装有驱动电机,所述驱动电机的输出端通过传动轴连接螺旋桨,所述下放驱动机构用于将所述螺旋桨下放或收回。
3、但是以上专利依然存在不足:1、该专利的稳定性不足,只是通过调节机构带动两个电池箱同步反向移动,进而带动两个船体同步反向移动,从而调节两个船体之间的间距避免侧翻,但是这种调节方式只是增加了两个船体之间的横向间距,也只能防止船体侧翻,当海上的风浪较大时,浪潮会从各个角度拍打在船体上,导致船体直接翻掉;2、该专利无法对船体底部附着的海洋生物进行清理,当船体在海面上长时间的漂浮后,船体底部会附着一些水生生物,导致船体的重量增加,影响船体的灵活性。
技术实现思路
1、为了弥补以上不足,本发明提供了一种海洋无人船装置,以解决上述背景技术中提出的该专利的稳定性不足和无法对船体底部附着的海洋生物进行清理的问题。
2、本发明的技术方案是:
3、一种海洋无人船装置,包括无人船体,所述无人船体上设有驱动单元、充电单元、支撑单元、定位单元和清理单元,所述无人船体的内部设有蓄电池,所述驱动单元包括设于所述无人船体底面的驱动液压缸,所述驱动液压缸的输出端上设有驱动转向电机,所述驱动转向电机的输出端上设有驱动转向轴,所述驱动转向轴上设有驱动电机,所述驱动电机的输出端上设有螺旋桨,所述充电单元包括设于所述无人船体底面的充电液压缸,所述充电液压缸的输出端上设有充电转向电机,所述充电转向电机的输出端上设有充电转向轴,所述充电转向轴上设有发电机,所述发电机的输出端上设有水轮,所述支撑单元包括呈圆周阵列设于所述无人船体侧面的支撑液压缸,所述支撑液压缸的输出端上设有漂浮座,所述定位单元包括设于所述无人船体顶面的电气箱,所述电气箱的内部设有卷扬机,所述卷扬机的卷筒上设有钢丝绳,所述钢丝绳的牵引端延伸至所述电气箱的底部,所述钢丝绳延伸至所述电气箱底部的牵引端上设有定位箱,所述定位箱的内部设有进水阀和出水阀,所述清理单元包括设于所述定位箱底面的清理液压缸,所述清理液压缸的输出端上设有清理转向电机,所述清理转向电机的输出端上设有清理转向轴,所述清理转向轴上设有伸缩液压缸,所述伸缩液压缸的输出端上设有清理刀。
4、优选的,所述无人船体为圆柱形结构,若干所述漂浮座共形成一个漂浮圆环。
5、优选的,所述无人船体的侧面呈圆周阵列设有支撑侧槽,所述支撑液压缸设于所述支撑侧槽的内壁上,所述支撑侧槽的内壁上还呈圆周阵列设有伸缩套管,所述伸缩套管的输出端与所述漂浮座相连接。
6、优选的,所述无人船体的底面呈对称设有驱动底槽和充电底槽,所述驱动液压缸设于所述驱动底槽的内壁上,所述充电液压缸设于所述充电底槽的内壁上,所述定位箱的底面中心处设有清理底槽,所述清理液压缸设于所述清理底槽的内壁上。
7、优选的,所述驱动底槽、所述充电底槽和所述清理底槽的槽口处均呈对称设有密封槽,所述密封槽的内壁上设有密封液压缸,所述密封液压缸的输出端上设有封闭板,所述封闭板的板面上设有半圆形结构的卡槽。
8、优选的,所述卡槽的内壁上设有滑槽,所述滑槽的内壁上设有密封弹簧,所述密封弹簧的另一端上设有密封块。
9、优选的,所述电气箱的底面设有安装板,所述安装板的底面与所述无人船体的顶面之间呈圆周阵列设有安装柱,所述无人船体的中心处设有圆台形结构的定位孔,所述定位箱为适配于所述定位孔的圆台形结构。
10、优选的,所述安装板的底面呈对称转动设有导向板。
11、优选的,所述安装板的底面设有圆环形的插座,所述定位箱的顶面设有圆环形的插头。
12、优选的,所述定位箱的底面呈对称设有两个连接孔,所述进水阀的输入端和所述出水阀输出端分别与两个连接孔相连接,所述连接孔的内壁上设有过滤网。
13、与现有技术相比,本发明的有益效果是:
14、其一,本发明通过支撑单元将漂浮座呈圆周阵列分散在无人船体的侧面,即可提高无人船体在海面上的稳定性,从而应对从各个角度拍打在船体上的浪潮,同时通过清理单元对无人船体和漂浮座底部附着的海洋生物进行清理,即可防止海洋生物附着在无人船体和漂浮座的底部。
15、其二,本发明通过支撑液压缸驱动若干漂浮座呈圆周阵列分散在无人船体的侧面,从而应对从各个角度拍打在船体上的浪潮,同时通过漂浮座带动伸缩套管拉长,伸缩套管呈圆周阵列连接于漂浮座和无人船体之间,不仅能够提高漂浮座与无人船体之间的连接稳定性,从而提高无人船体在海面上的稳定性,还能够降低支撑液压缸所受的冲击力,从而使漂浮座与无人船体之间连接的更加稳定。
16、其三,本发明通过通过卷扬机将钢丝绳连接的定位箱收回原位,然后通过清理液压缸将清理转向电机、清理转向轴、伸缩液压缸和清理刀伸入海水中,接着通过清理转向电机带动清理刀转动来将无人船体和漂浮座底部附着的海洋生物清理掉,即可防止海洋生物附着在无人船体和漂浮座的底部,同时通过伸缩液压缸伸长清理刀的清理范围,从而对无人船体和漂浮座底部附着的海洋生物进行清理。
技术特征:
1.一种海洋无人船装置,其特征在于:包括无人船体(1),所述无人船体(1)上设有驱动单元、充电单元、支撑单元、定位单元和清理单元,所述无人船体(1)的内部设有蓄电池(11),所述驱动单元包括设于所述无人船体(1)底面的驱动液压缸(2),所述驱动液压缸(2)的输出端上设有驱动转向电机(21),所述驱动转向电机(21)的输出端上设有驱动转向轴(22),所述驱动转向轴(22)上设有驱动电机(23),所述驱动电机(23)的输出端上设有螺旋桨(24),所述充电单元包括设于所述无人船体(1)底面的充电液压缸(3),所述充电液压缸(3)的输出端上设有充电转向电机(31),所述充电转向电机(31)的输出端上设有充电转向轴(32),所述充电转向轴(32)上设有发电机(33),所述发电机(33)的输出端上设有水轮(34),所述支撑单元包括呈圆周阵列设于所述无人船体(1)侧面的支撑液压缸(4),所述支撑液压缸(4)的输出端上设有漂浮座(41),所述定位单元包括设于所述无人船体(1)顶面的电气箱(5),所述电气箱(5)的内部设有卷扬机(51),所述卷扬机(51)的卷筒上设有钢丝绳(52),所述钢丝绳(52)的牵引端延伸至所述电气箱(5)的底部,所述钢丝绳(52)延伸至所述电气箱(5)底部的牵引端上设有定位箱(53),所述定位箱(53)的内部设有进水阀(531)和出水阀(532),所述清理单元包括设于所述定位箱(53)底面的清理液压缸(6),所述清理液压缸(6)的输出端上设有清理转向电机(61),所述清理转向电机(61)的输出端上设有清理转向轴(62),所述清理转向轴(62)上设有伸缩液压缸(63),所述伸缩液压缸(63)的输出端上设有清理刀(64)。
2.如权利要求1所述的海洋无人船装置,其特征在于:所述无人船体(1)为圆柱形结构,若干所述漂浮座(41)共形成一个漂浮圆环。
3.如权利要求1所述的海洋无人船装置,其特征在于:所述无人船体(1)的侧面呈圆周阵列设有支撑侧槽,所述支撑液压缸(4)设于所述支撑侧槽的内壁上,所述支撑侧槽的内壁上还呈圆周阵列设有伸缩套管(42),所述伸缩套管(42)的输出端与所述漂浮座(41)相连接。
4.如权利要求1所述的海洋无人船装置,其特征在于:所述无人船体(1)的底面呈对称设有驱动底槽(71)和充电底槽(72),所述驱动液压缸(2)设于所述驱动底槽(71)的内壁上,所述充电液压缸(3)设于所述充电底槽(72)的内壁上,所述定位箱(53)的底面中心处设有清理底槽(73),所述清理液压缸(6)设于所述清理底槽(73)的内壁上。
5.如权利要求4所述的海洋无人船装置,其特征在于:所述驱动底槽(71)、所述充电底槽(72)和所述清理底槽(73)的槽口处均呈对称设有密封槽(74),所述密封槽(74)的内壁上设有密封液压缸(75),所述密封液压缸(75)的输出端上设有封闭板(76),所述封闭板(76)的板面上设有半圆形结构的卡槽(77)。
6.如权利要求5所述的海洋无人船装置,其特征在于:所述卡槽(77)的内壁上设有滑槽(78),所述滑槽(78)的内壁上设有密封弹簧(79),所述密封弹簧(79)的另一端上设有密封块(80)。
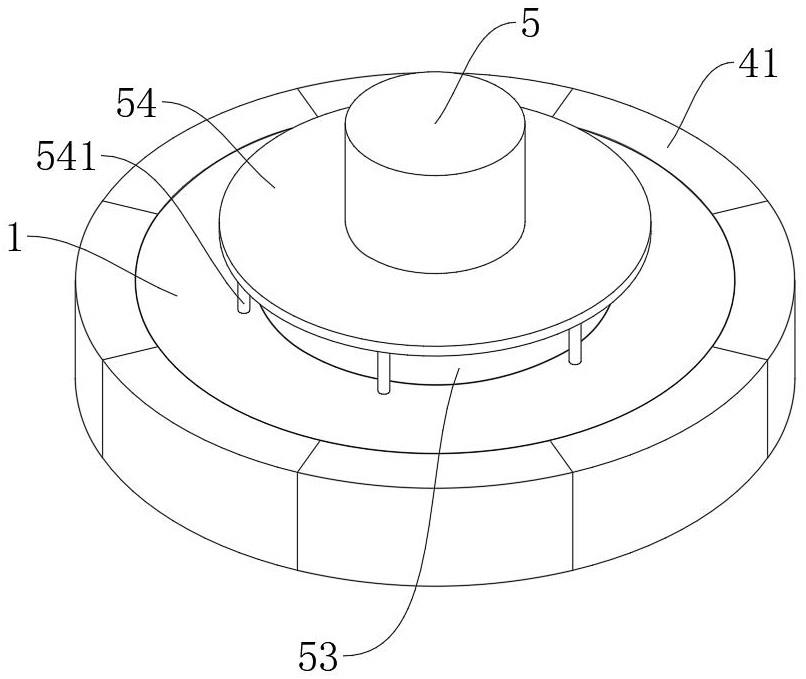
7.如权利要求1所述的海洋无人船装置,其特征在于:所述电气箱(5)的底面设有安装板(54),所述安装板(54)的底面与所述无人船体(1)的顶面之间呈圆周阵列设有安装柱(541),所述无人船体(1)的中心处设有圆台形结构的定位孔,所述定位箱(53)为适配于所述定位孔的圆台形结构。
8.如权利要求7所述的海洋无人船装置,其特征在于:所述安装板(54)的底面呈对称转动设有导向板(56)。
9.如权利要求8所述的海洋无人船装置,其特征在于:所述安装板(54)的底面设有圆环形的插座(55),所述定位箱(53)的顶面设有圆环形的插头(551)。
10.如权利要求1所述的海洋无人船装置,其特征在于:所述定位箱(53)的底面呈对称设有两个连接孔,所述进水阀(531)的输入端和所述出水阀(532)输出端分别与两个连接孔相连接,所述连接孔的内壁上设有过滤网(533)。
技术总结
本发明涉及无人船技术领域,具体为一种海洋无人船装置,包括无人船体,无人船体上设有驱动单元、充电单元、支撑单元、定位单元和清理单元,无人船体的内部设有蓄电池,支撑单元包括呈圆周阵列设于无人船体侧面的支撑液压缸,支撑液压缸的输出端上设有漂浮座,定位单元包括设于无人船体顶面的电气箱,清理单元包括设于定位箱底面的清理液压缸,清理液压缸的输出端上设有清理转向电机,清理转向电机的输出端上设有清理转向轴,清理转向轴上设有伸缩液压缸,伸缩液压缸的输出端上设有清理刀。本发明通过支撑单元将漂浮座呈圆周阵列分散在无人船体的侧面来提高稳定性,同时通过清理单元对无人船体和漂浮座底部附着的海洋生物进行清理。
技术研发人员:万玉华,魏斌,马娟
受保护的技术使用者:江苏省无锡交通高等职业技术学校
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!