一种定位校准位置的水上光伏电站的制作方法
本发明涉及水上光伏电站,具体为一种定位校准位置的水上光伏电站。
背景技术:
1、水上光伏电站是指在水塘、水库、湖泊等在水上建设的光伏电站,根据项目地水深等情况,建设形式分为两种:一般水深小于3m 的采用打桩架高式安装;水深3m 以上的可以采用漂浮式安装系统。漂浮式水上光伏电站,安装时需要在岸边或者接近岸边的水域进行组装,组装完成后,通过船只利用缆绳牵引至预定水域,由于光伏电站的光伏板数量较多,单个光伏电站的占地面积较大,对于位置的调整比较麻烦,需要多个牵引船,配合无人机,gps等装置,需要多个操作人员配合,才能完成定位,铺设较为麻烦。
2、漂浮式水上光伏电站,一般会采用绳索或者支撑杆固定,离岸较远时会采用拉簧加混凝土锚块的方式固定。绳索或者支撑杆的固定方式,受水面升降影响较大,水面上升时,容易导致绳索断裂,水面下降时,绳索张力下降,容易导致电站漂移,影响生产安全和生产效率。拉簧加混凝土锚块的固定方式能够承受一定的水面升降,但是升降超过设计余量时,还是存在断裂风险,且拉簧存在金属疲劳的问题,时间长了拉簧弹力下降,固定能力会减弱,导致电站的位置发生偏移。另外浮箱之间通常使用刚性连接,水面出现波浪时,波浪会对浮箱造成冲击,由于浮箱采用刚性连接,波浪对浮箱的冲击全部由刚性连接件和浮箱本身承受,当波浪过大时,会造成连接部位受损,严重时会造成浮箱断裂,使得光伏电站解体。
3、鉴于此,我们提出一种定位校准位置的水上光伏电站。
技术实现思路
1、为了弥补以上不足,本发明提供了一种定位校准位置的水上光伏电站。
2、本发明的技术方案是:
3、一种定位校准位置的水上光伏电站,包括:
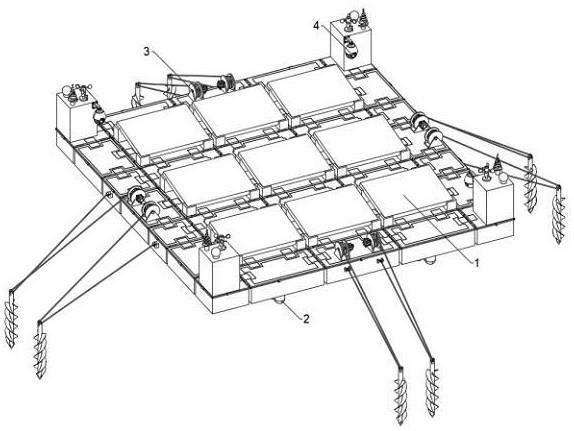
4、光电组件,所述光电组件包括浮箱,所述浮箱包括安装浮箱、检修浮箱和限位浮箱,所述安装浮箱、检修浮箱和限位浮箱之间通过转动连接件可转动连接,所述安装浮箱、检修浮箱和限位浮箱外侧通过钢缆固定环固定连接有二次固定钢缆。
5、还包括:
6、主动行动组件,所述主动行动组件包括多个驱动装置和方向控制装置,所述驱动装置固定安装在限位浮箱的底面,所述方向控制装置固定安装检修浮箱的底面,所述驱动装置包括螺旋桨,左右两侧的所述螺旋桨轴线和前后两侧的螺旋桨轴线相互垂直;
7、锚固组件,所述锚固组件包括锚固装置和收卷装置,锚固装置和收卷装置之间通过锚固钢缆连接,所述锚固钢缆端部通过张力检测组件与限位浮箱固定连接,张力检测组件用于检测锚固钢缆的张力;
8、控制装置,所述控制装置安装在四个角落上的限位浮箱顶面,所述控制装置包括控制箱,所述控制箱顶面固定安装有卫星定位模块,通过四个卫星定位模块配合,能够实现对光电组件的定位。
9、作为本发明的优选技术方案,所述安装浮箱、检修浮箱和限位浮箱上贯通设有活动安装槽,所述转动连接件安装在活动安装槽内,所述转动连接件包括工字连接杆,所述工字连接杆通过保护盖板可转动安装在活动安装槽内。
10、作为本发明的优选技术方案,所述工字连接杆上下两侧且位于活动安装槽内滑动安装有限位滑块,所述限位滑块和保护盖板之间且位于活动安装槽内固定安装有限位弹簧。
11、作为本发明的优选技术方案,所述驱动装置还包括驱动电机,所述驱动电机的输出轴贯穿限位浮箱底面,限位浮箱底面固定安装有齿轮传动箱,驱动电机的输出轴与齿轮传动箱的输入轴固定连接,所述螺旋桨通过传动轴与齿轮传动箱可转动连接。
12、作为本发明的优选技术方案,所述驱动装置间隔排列,相邻的两个驱动装置之间至少隔着一个限位浮箱。
13、作为本发明的优选技术方案,所述方向控制装置包括转向电机,所述转向电机固定安装在检修浮箱内,所述转向电机的输出轴贯穿检修浮箱底面固定连接有导向舵。
14、作为本发明的优选技术方案,所述锚固装置包括锚固杆,所述锚固杆杆身上设有螺旋板,所述锚固杆固定安装在水底的泥土内,所述锚固杆顶端可转动安装有锚固滑轮,所述锚固钢缆从锚固滑轮上方经过,穿过锚固滑轮后改变方向。
15、作为本发明的优选技术方案,所述收卷装置包括钢缆轮,所述钢缆轮固定安装在限位浮箱顶面,所述钢缆轮侧面固定安装有收卷电机,所述锚固钢缆缠绕在钢缆轮上。
16、作为本发明的优选技术方案,所述张力检测组件包括滑动固定架,所述滑动固定架位于限位浮箱内且滑动固定架尾端贯穿限位浮箱固定安装有固定杆,所述锚固钢缆端部与固定杆固定连接,所述滑动固定架和限位浮箱内侧面之间固定安装有张力检测装置。
17、作为本发明的优选技术方案,所述控制箱顶部还固定安装有风速风向检测装置和无线信号传输装置,所述控制箱朝向安装浮箱一侧固定安装有摄像头。
18、与现有技术相比,本发明的有益效果是:
19、1、本发明通过设置主动行动组件,在拖曳船将光电组件拖动至预定位置附近后,能够通过驱动电机驱动螺旋桨转动,使得光电组件位置主动发生改变,左右两侧的所述螺旋桨轴线和前后两侧的螺旋桨轴线相互垂直,能够使光电组件产生水平方向的移动,通过转向电机改变导向舵方向,能够控制光电组件的移动方向,配合四个卫星定位模块,能够实现光电组件的定位和位置校准。
20、本发明通过设置锚固装置和收卷装置,利用锚固钢缆连接,能够实现光电组件的固定,通过张力检测装置能够检测锚固钢缆受到的张力,通过收卷电机驱动钢缆轮转动,能够收卷或者放松锚固钢缆,从而适应水面的上升或者下降,使得光电组件不会在水面升降时发生偏移。
21、本发明通过设置风速风向检测装置,能够检测环境中的风速和风向,配合驱动电机驱动螺旋桨转动,利用转向电机改变导向舵方向,能够产生与风向相反的力,平衡锚固钢缆因外界风力而受到的不同的拉力,避免光电组件发生偏移同时延长锚固钢缆的使用寿命。
22、本发明利用工字连接杆连接两个不同的浮箱,由于工字连接杆能够在活动安装槽内转动,所以两个不同的浮箱之间能够相对的发生上下的位移,从而将波浪的冲击转化为重力势能和对工字连接杆的拉力,减少浮箱受到的冲击,当工字连接杆受到的拉力接近浮箱的受力极限时,调节套筒会在断裂诱导槽处发生断裂,使得两个t型连接杆分离,从而使得两个浮箱之间分离,避免浮箱损坏,同时二次固定钢缆能够提供额外的保护,避免光电站解体。
技术特征:
1.一种定位校准位置的水上光伏电站,包括:
2.如权利要求1所述的定位校准位置的水上光伏电站,其特征在于:所述安装浮箱(111)、检修浮箱(112)和限位浮箱(113)上贯通设有活动安装槽(13),所述转动连接件安装在活动安装槽(13)内,所述转动连接件包括工字连接杆(14),所述工字连接杆(14)通过保护盖板(17)可转动安装在活动安装槽(13)内。
3.如权利要求2所述的定位校准位置的水上光伏电站,其特征在于:所述工字连接杆(14)包括两个t型连接杆(141),两个t型连接杆(141)之间通过调节套筒(142)固定连接,所述调节套筒(142)上设有断裂诱导槽(143),所述工字连接杆(14)上下两侧且位于活动安装槽(13)内滑动安装有限位滑块(15),所述限位滑块(15)和保护盖板(17)之间固定安装有限位弹簧(16)。
4.如权利要求3所述的定位校准位置的水上光伏电站,其特征在于:所述驱动装置还包括驱动电机(21),所述驱动电机(21)的输出轴贯穿限位浮箱(113)底面,限位浮箱(113)固定安装有齿轮传动箱(22),驱动电机(21)的输出轴与齿轮传动箱(22)的输入轴固定连接,所述螺旋桨(24)通过传动轴(23)与齿轮传动箱(22)可转动连接。
5.如权利要求4所述的定位校准位置的水上光伏电站,其特征在于:所述驱动装置间隔排列,相邻的两个驱动装置之间至少隔着一个限位浮箱(113)。
6.如权利要求5所述的定位校准位置的水上光伏电站,其特征在于:所述方向控制装置包括转向电机(26),所述转向电机(26)固定安装在检修浮箱(112)内,所述转向电机(26)的输出轴贯穿检修浮箱(112)底面固定连接有导向舵(27)。
7.如权利要求6所述的定位校准位置的水上光伏电站,其特征在于:所述锚固装置包括锚固杆(31),所述锚固杆(31)杆身上设有螺旋板,所述锚固杆(31)固定安装在水底的泥土内,所述锚固杆(31)顶端可转动安装有锚固滑轮(32),所述锚固钢缆(35)从锚固滑轮(32)上方经过,穿过锚固滑轮(32)后改变方向。
8.如权利要求7所述的定位校准位置的水上光伏电站,其特征在于:所述收卷装置包括钢缆轮(34),所述钢缆轮(34)固定安装在限位浮箱(113)顶面,所述钢缆轮(34)侧面固定安装有收卷电机(33),所述锚固钢缆(35)缠绕在钢缆轮(34)上。
9.如权利要求8所述的定位校准位置的水上光伏电站,其特征在于:所述张力检测组件包括滑动固定架(37),所述滑动固定架(37)位于限位浮箱(113)内且滑动固定架(37)尾端贯穿限位浮箱(113)固定安装有固定杆(36),所述锚固钢缆(35)端部与固定杆(36)固定连接,所述滑动固定架(37)和限位浮箱(113)内侧面之间固定安装有张力检测装置(38)。
10.如权利要求9所述的定位校准位置的水上光伏电站,其特征在于:所述控制箱(41)顶部还固定安装有风速风向检测装置(43)和无线信号传输装置(44),所述控制箱(41)朝向安装浮箱(111)一侧固定安装有摄像头(45)。
技术总结
本发明涉及水上光伏电站技术领域,具体为一种定位校准位置的水上光伏电站,包括:光电组件;还包括:主动行动组件,主动行动组件包括多个驱动装置和方向控制装置;锚固组件,锚固组件包括锚固装置和收卷装置;控制装置。本发明,通过设置主动行动组件,能够通过驱动装置使光电组件产生水平方向的移动,通过方向控制装置能够控制光电组件的移动方向,配合四个卫星定位模块,能够实现光电组件的定位和位置校准;通过设置锚固装置和收卷装置,利用收卷电机驱动钢缆轮转动,能够收卷或者放松锚固钢缆,从而适应水面的上升或者下降;通过设置风速风向检测装置,配合主动行动组件能够平衡锚固钢缆因外界风力而受到的不同的拉力。
技术研发人员:严程
受保护的技术使用者:江苏通光昌隆电力能源有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!