一种水下作业机器人坝面吸附机构及其控制方法
本发明涉及一种水下作业机器人坝面吸附机构及其控制方法,属于水下机器人。
背景技术:
1、水下机器人作为一种功能全面的科研和检测作业设备,被广泛应用于海洋工程、港口建设、科学研究、水电站和大坝检测等领域。应用水下机器人代替人工进行水下作业,可有效规避潜水员的生命安全风险,提高工作效率。
2、在进行水电站水下坝面的缺陷检测时,水下机器人需要在强流影响下的大坝表面具备稳定的吸附和移动功能。现有的水下吸附方式主要包括磁吸附、推力吸附和吸盘负压吸附,其中磁吸附只适用于导磁壁面,使用范围窄;推力吸附能耗大、噪声高,且运动控制困难;吸盘负压吸附要求吸附表面平整即可达到较稳定的吸附强度。
3、公开号为cn115571307a的中国专利公开了一种水下机器人吸附壁面的控制结构及控制方法,水下机器人采用防水电动伸缩杆伸长推动升降板和多组吸盘向下移动并贴紧壁面,吸盘连通伸缩软管并设置在通孔球体底部,通过球体转动适应凹凸不平的壁面,采用wny1000水泵将吸盘腔内的水抽走形成负压吸附。但这种方法形成的吸附力将传递到伸缩软管上,结构缺乏一定的刚度来抵御水下强流的冲击,无法进行稳定的施工作业,且电动伸缩杆和水泵的防水等级也无法完全克服深水水压的影响。
技术实现思路
1、本发明的目的是提供一种水下作业机器人坝面吸附机构,能够自动补偿吸盘与坝面间距,且适用于坝体非均匀表面,同时该吸附机构在不同深度的水压影响下也能正常工作。
2、为实现上述目的,本发明采用如下技术方案:
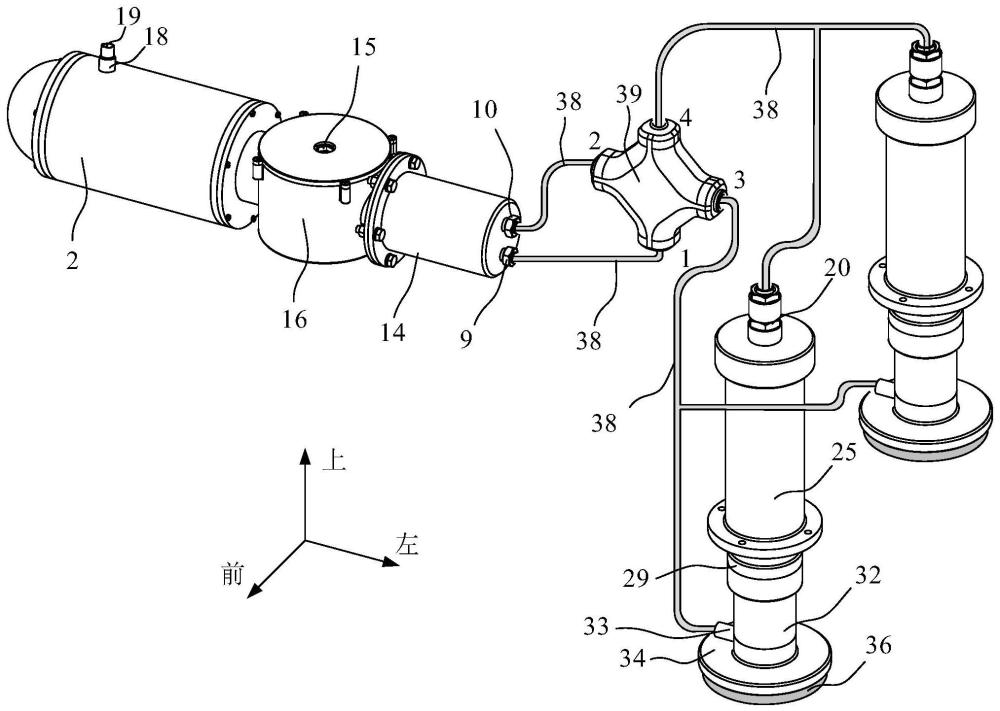
3、一方面,本发明提供了一种水下作业机器人坝面吸附机构,包括水下负压泵、坝面吸附组件、位移补偿组件和防水电磁换向阀;所述水下负压泵的端部设置有进口单向阀和出口单向阀;所述坝面吸附组件包括金属吸盘,所述金属吸盘底部设置有透水柔性垫层,所述金属吸盘顶部固定连接有吸盘支撑架,所述吸盘支撑架上固定连接有球铰盖板;所述位移补偿组件包括水压缸,所述水压缸内设置有水压缸活塞,所述水压缸活塞的活塞杆连接球铰关节,所述活塞杆嵌接在球铰关节的柄部内,所述球铰关节的柄部位于水压缸内,所述球铰关节的柄部与水压缸内壁之间设置有复位弹簧,所述球铰关节的球头部与球铰盖板铰接,所述吸盘支撑架内设置有与球铰关节的球头部抵接的预紧弹簧;所述防水电磁换向阀设置有四个阀口,四个阀口分别与进口单向阀、出口单向阀、金属吸盘的吸盘腔和水压缸顶部连通。
4、进一步地,所述水下负压泵包括水密舱、与水密舱固定连接的齿轮箱和与齿轮箱固定连接的负压泵缸体,所述水密舱内设置有减速电机,所述齿轮箱内设置有小锥齿轮和与小锥齿轮啮合的大锥齿轮,所述负压泵缸体内设置有负压泵活塞和与负压泵活塞连接的连杆,所述减速电机的电机轴与小锥齿轮连接,所述小锥齿轮与水密舱之间采用旋转动密封,所述大锥齿轮与所述连杆连接,所述减速电机通过锥齿轮传动带动负压泵活塞往复运动,所述负压泵缸体端部设置有所述进口单向阀和出口单向阀,所述齿轮箱顶部设置有过滤装置(a)。
5、进一步地,所述金属吸盘的吸盘腔内设置有过滤膜,所述金属吸盘的侧面开设有与吸盘进水口连通的吸盘出水口,所述吸盘进水口设置有过滤装置(b),所述吸盘出水口通过伸缩软管与防水电磁换向阀的一个阀口连通。
6、进一步地,所述齿轮箱与水密舱连接的一端设置有若干定位圆柱凸台,所述若干定位圆柱凸台与减速电机一端的限位孔连接,对减速电机进行径向固定。
7、进一步地,所述水密舱内设置有电机支撑板,所述电机支撑板沿与减速电机轴向垂直的方向设置,所述减速电机固定安装在电机支撑板上,所述电机支撑板用于对减速电机进行轴向固定。
8、进一步地,所述位移补偿组件还包括导向限位套,所述导向限位套设置在水压缸内壁与球铰关节的柄部之间,且通过复位弹簧的弹性力紧贴在水压缸底部。
9、进一步地,所述坝面吸附组件设置有多个,所述位移补偿组件也对应设置有多个,多个所述金属吸盘的吸盘腔通过伸缩软管连通后再与防水电磁换向阀的一个阀口连通,多个所述水压缸的顶部也通过伸缩软管连通后再与防水电磁换向阀的一个阀口连通。
10、进一步地,所述小锥齿轮与水密舱之间设置有动密封圈。
11、进一步地,所述负压泵活塞与负压泵缸体内壁之间设置有格莱圈(a)和防尘圈(a)。
12、进一步地,所述水压缸活塞与水压缸内壁之间设置有格莱圈(b)和防尘圈(b),所述水压缸底端与球铰关节的柄部之间设置有防尘圈(c)。
13、另一方面,本发明提供了一种水下作业机器人坝面吸附机构的控制方法,所述防水电磁换向阀的四个阀口分别为1口、2口、3口和4口,其中1口与进口单向阀连通,2口与出口单向阀连通,3口与金属吸盘的吸盘腔连通,4口与水压缸顶部连通,所述方法包括:
14、打开进口单向阀、防水电磁换向阀的1口和3口,关闭出口单向阀、防水电磁换向阀的2口和4口,启动减速电机,减速电机通过锥齿轮传动带动负压泵活塞向左移动,将金属吸盘的吸盘腔内的水抽取到负压泵缸体内;
15、关闭进口单向阀、防水电磁换向阀的1口和3口,打开出口单向阀、防水电磁换向阀的2口和4口,驱动减速电机反向旋转,减速电机通过锥齿轮传动带动负压泵活塞向右移动,将负压泵缸体内的水由水压缸顶部排入到水压缸内,推动水压缸活塞向下轴向移动,利用球铰关节本身的结构和预紧弹簧的预紧力,使吸盘支撑架相对于球铰关节保持转动回正状态,以补偿金属吸盘与坝面的间距;
16、工作结束后,打开进口单向阀、防水电磁换向阀的1口和4口,关闭出口单向阀、防水电磁换向阀的2口和3口,减速电机通过锥齿轮传动带动负压泵活塞向左移动,将水压缸内的水抽取到负压泵缸体中,并在复位弹簧的作用下使金属吸盘脱离坝面。
17、与现有技术相比,本发明主要具有以下有益效果:
18、1、通过在球铰关节与吸盘支撑架之间设置预紧弹簧,利用球铰关节自身结构和预紧弹簧的弹性力,使吸盘支撑架能够相对于球铰关节转动回正,结合吸盘底部铺设的一层透水柔性垫层,从而使吸盘能够紧密吸附在坝体不均匀的表面上;
19、2、利用负压泵将吸盘腔内的水排入水压缸内,推动水压缸活塞轴向移动,实现主动补偿吸盘与坝面间距,吸盘回程依靠防水电磁换向阀工作,负压泵开始抽取水压缸内的水,并在复位弹簧作用下使吸盘脱离坝面;
20、3、负压泵活塞一端设置有进出口单向阀,一端通过过滤装置(a)连通外部水域,平衡活塞两端水压,使负压泵在不同深度水下也能正常工作;
21、4、本发明形成的吸附力通过金属吸盘传递到水压缸上,水压缸将吸附力传递到与其连接的机器人本体上,使得伸缩软管只起到吸、排水的功能,解决了现有技术形成的吸附力传递到伸缩软管上,导致结构缺乏一定的刚度来抵御水下强流冲击的问题;
22、5、本发明结构紧凑、安装便捷,适用于各种水深的粗糙坝面工作环境,能够以很小的功耗实现较大的吸附力。
技术特征:
1.一种水下作业机器人坝面吸附机构,其特征在于,包括水下负压泵、坝面吸附组件、位移补偿组件和防水电磁换向阀(39);所述水下负压泵的端部设置有进口单向阀(9)和出口单向阀(10);所述坝面吸附组件包括金属吸盘(34),所述金属吸盘(34)底部设置有透水柔性垫层(36),所述金属吸盘(34)顶部固定连接有吸盘支撑架(32),所述吸盘支撑架(32)上固定连接有球铰盖板(29);所述位移补偿组件包括水压缸(25),所述水压缸(25)内设置有水压缸活塞(21),所述水压缸活塞(21)的活塞杆(27)连接球铰关节(30),所述活塞杆(27)嵌接在球铰关节(30)的柄部内,所述球铰关节(30)的柄部位于水压缸(25)内,所述球铰关节(30)的柄部与水压缸(25)内壁之间设置有复位弹簧(24),所述球铰关节(30)的球头部与球铰盖板(29)铰接,所述吸盘支撑架(32)内设置有与球铰关节(30)的球头部抵接的预紧弹簧(31);所述防水电磁换向阀(39)设置有四个阀口,四个阀口分别与进口单向阀(9)、出口单向阀(10)、金属吸盘(34)的吸盘腔和水压缸(25)顶部连通。
2.根据权利要求1所述的水下作业机器人坝面吸附机构,其特征在于,所述水下负压泵包括水密舱(2)、与水密舱(2)固定连接的齿轮箱(16)和与齿轮箱(16)固定连接的负压泵缸体(14),所述水密舱(2)内设置有减速电机(3),所述齿轮箱(16)内设置有小锥齿轮(4)和与小锥齿轮(4)啮合的大锥齿轮(5),所述负压泵缸体(14)内设置有负压泵活塞(11)和与负压泵活塞(11)连接的连杆(7),所述减速电机(3)的电机轴与小锥齿轮(4)连接,所述小锥齿轮(4)与水密舱(2)之间采用旋转动密封,所述大锥齿轮(5)与所述连杆(7)连接,所述减速电机(3)通过锥齿轮传动带动负压泵活塞(11)往复运动,所述负压泵缸体(14)端部设置有所述进口单向阀(9)和出口单向阀(10),所述齿轮箱(16)顶部设置有过滤装置(a)(15)。
3.根据权利要求1所述的水下作业机器人坝面吸附机构,其特征在于,所述金属吸盘(34)的吸盘腔内设置有过滤膜(37),所述金属吸盘(34)的侧面开设有与吸盘进水口连通的吸盘出水口,所述吸盘进水口设置有过滤装置(b)(35),所述吸盘出水口通过伸缩软管(38)与防水电磁换向阀(39)的一个阀口连通。
4.根据权利要求2所述的水下作业机器人坝面吸附机构,其特征在于,所述齿轮箱(16)与水密舱(2)连接的一端设置有若干定位圆柱凸台(1601),所述若干定位圆柱凸台(1601)与减速电机(3)一端的限位孔连接,对减速电机(3)进行径向固定。
5.根据权利要求2所述的水下作业机器人坝面吸附机构,其特征在于,所述水密舱(2)内设置有电机支撑板(1),所述电机支撑板(1)沿与减速电机(3)轴向垂直的方向设置,所述减速电机(3)固定安装在电机支撑板(1)上,所述电机支撑板(1)用于对减速电机(3)进行轴向固定。
6.根据权利要求1所述的水下作业机器人坝面吸附机构,其特征在于,所述位移补偿组件还包括导向限位套(26),所述导向限位套(26)设置在水压缸(25)内壁与球铰关节(30)的柄部之间,且通过复位弹簧(24)的弹性力紧贴在水压缸(25)底部。
7.根据权利要求1所述的水下作业机器人坝面吸附机构,其特征在于,所述坝面吸附组件设置有多个,所述位移补偿组件也对应设置有多个,多个所述金属吸盘(34)的吸盘腔通过伸缩软管(38)连通后再与防水电磁换向阀(39)的一个阀口连通,多个所述水压缸(25)的顶部也通过伸缩软管(38)连通后再与防水电磁换向阀(39)的一个阀口连通。
8.根据权利要求2所述的水下作业机器人坝面吸附机构,其特征在于,所述小锥齿轮(4)与水密舱(2)之间设置有动密封圈(17)。
9.根据权利要求1所述的水下作业机器人坝面吸附机构,其特征在于,所述水压缸活塞(21)与水压缸(25)内壁之间设置有格莱圈(b)(22)和防尘圈(b)(23),所述水压缸(25)底端与球铰关节(30)的柄部之间设置有防尘圈(c)(28)。
10.权利要求2~9任一项所述的水下作业机器人坝面吸附机构的控制方法,其特征在于,所述防水电磁换向阀(39)的四个阀口分别为1口、2口、3口和4口,其中1口与进口单向阀(9)连通,2口与出口单向阀(10)连通,3口与金属吸盘(34)的吸盘腔连通,4口与水压缸(25)顶部连通,所述方法包括:
技术总结
本发明公开了一种水下作业机器人坝面吸附机构及其控制方法,所述坝面吸附机构包括水下负压泵、坝面吸附组件、位移补偿组件和防水电磁换向阀。水下负压泵设置有进出口单向阀;坝面吸附组件包括金属吸盘,金属吸盘底部设置有透水柔性垫层,金属吸盘顶部固定有吸盘支撑架,吸盘支撑架上固定有球铰盖板;位移补偿组件包括水压缸,水压缸内设置有水压缸活塞,水压缸活塞的活塞杆与球铰关节柄部连接,球铰关节柄部与水压缸内壁之间设置有复位弹簧,球铰关节的球头部与球铰盖板铰接,吸盘支撑架内设置有与球铰关节的球头部抵接的预紧弹簧。本发明结构紧凑、安装便捷,适用于各种水深的粗糙坝面工作环境,能够以很小的功耗实现较大的吸附力。
技术研发人员:张磊,曾涛,李俊杰,王延杰
受保护的技术使用者:河海大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!