一种浮力调整抛载装置的制作方法
本发明属于水下无人航行器,具体涉及一种浮力调整装置。
背景技术:
1、随着科学技术的发展以及海洋开发、军事应用的需求,水下无人航行器的发展越发重视,其水下工作区域亦越来越广泛,浮力调整则显得至关重要。目前大多数航行器安装有浮力调整舱,通过水泵抽放水调平浮力与重力,但是占据空间大设备多,并且水泵和电机还会产生震动和噪声问题,对于小排量无人航行器适应性不高。因此,为满足水下无人航行器浮力调整要求,保证其浮力减小后与重力平衡,且安装空间有限,可靠性需求高,有必要设计一种装载过程简单,配合精度要求低,环境适应性好,并能极大缩小浮力调整装置布置空间的高可靠性装置。
技术实现思路
1、本发明的目的是:针对现有技术的不足,提供一种浮力调整抛载装置。
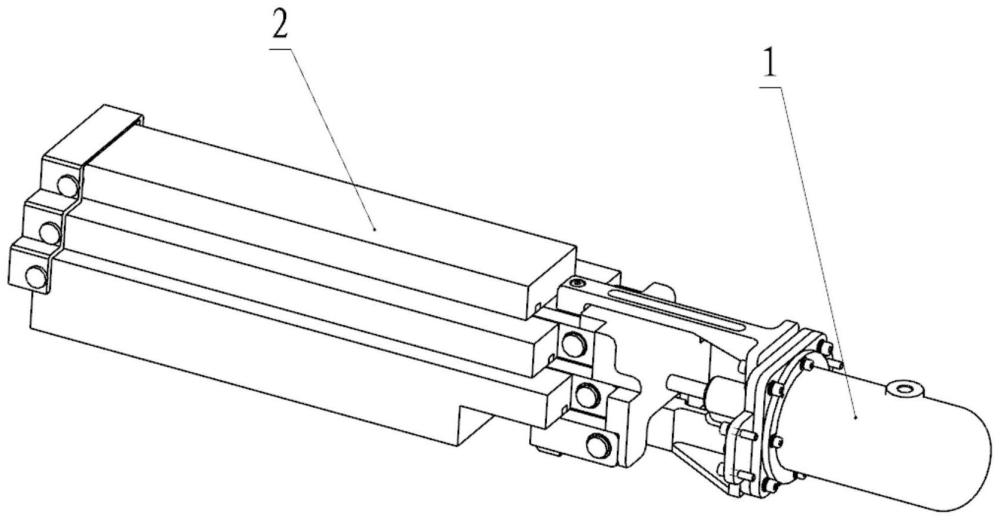
2、本发明的技术方案是:一种浮力调整抛载装置,包括:安装于水下无人航行器内的驱动机构以及装载释放机构。
3、驱动机构包括:驱动电机、电机转接座、安装座、密封罩和转接轴;密封罩与安装座组成密封腔体,驱动电机安装在密封腔体内,其输出端通过电机转接座与转接轴连接,转接轴穿过安装座与装载释放机构中的释放挡块连接。
4、装载释放机构包括:安装板及抛载支撑架;安装板上固定安装有转轴支撑座;转轴支撑座通过转轴安装支撑块,释放挡块的一侧端面设有阶梯结构,释放挡块在驱动机构的作用下能够前后移动,并通过释放挡块压块进行限位;抛载支撑架上设有连接轴;抛载的一端通过u型槽安装于连接轴,另一端搭接在支撑块上;当释放挡块移动至支撑块上方时,支撑块的一端卡在释放挡块的阶梯结构内,无法旋转,对抛载提供支撑;当释放挡块向后撤离支撑块时,支撑块向下旋转,抛载失去支撑,向下掉落实现抛载。
5、在上述方案的基础上,进一步的,为防止抛载左右前后晃动,在抛载与支撑块的搭接处设有用于限位的凹凸结构。
6、有益效果:
7、(1)本发明通过安装板和抛载支撑架支撑整个浮力调整抛载装置,并固定在水下无人航行器上;由驱动机构提供动力源,通过控制转接轴伸出和回收,实现控制释放挡块压住和释放支撑块,达到抛载安装和释放目的,从而实现水下无人航行器重力减小与浮力平衡的功能。
8、(2)本发明装置对比已有技术,能大幅简化装载过程,缩小浮力调整装置布置空间,且装载配合精度要求低,节省人力的同时提高效率;除驱动源外为纯机械传动装置,可靠性高,环境适应性好,可满足各种环境使用要求。
9、(3)本发明还可根据实际情况需要,增加和减小抛载重量,亦可增加抛弃压载级数,适应更多使用要求。
技术特征:
1.一种浮力调整抛载装置,包括:驱动机构(1)以及装载释放机构(2);其特征在于:
2.如权利要求1所述的一种浮力调整抛载装置,其特征在于:所述抛载与所述支撑块的搭接处设有用于限位的凹凸结构。
3.如权利要求1所述的一种浮力调整抛载装置,其特征在于:所述安装板(8)及所述抛载支撑架(21)安装于水下无人航行器内。
4.如权利要求1所述的一种浮力调整抛载装置,其特征在于:所述抛载装置设有第一抛载(22)、第二抛载(23)以及第三抛载(24);所述第一抛载(22)、所述第二抛载(23)以及所述第三抛载(24)的一端分别通过第一连接轴(18)、第二连接轴(19)、第三连接轴(20)安装在所述抛载支撑架(21)内;所述第一抛载(22)、所述第二抛载(23)以及所述第三抛载(24)的另一端分别搭接在第一支撑块(12)、第二支撑块(13)、第三支撑块(14)上;所述第一支撑块(12)、所述第二支撑块(13)、所述第三支撑块(14)分别通过第一转轴(15)、第二转轴(16)、第三转轴(17)由下至上的安装于所述转轴支撑座(9)内;所述释放挡块(11)设有三级阶梯结构,分别对所述第一支撑块(12)、所述第二支撑块(13)、所述第三支撑块(14)的一端进行限位。
5.如权利要求1-4任一项所述的一种浮力调整抛载装置,其特征在于:所述驱动机构(1)包括:驱动电机(3)、电机转接座(4)、安装座(5)、密封罩(6)和转接轴(7);所述密封罩(6)与所述安装座(5)组成密封腔体,所述驱动电机(3)安装在密封腔体内,其输出端通过所述电机转接座(4)与所述转接轴(7)连接,所述转接轴(7)穿过所述安装座(5)与所述释放挡块(11)连接,控制所述释放挡块(11)压住和释放支撑块。
技术总结
本发明属于一种浮力调整抛载装置技术领域,具体涉及一种浮力调整装置。一种浮力调整抛载装置,其技术方案是:安装板上固定安装有转轴支撑座;转轴支撑座通过转轴安装支撑块,释放挡块的一侧端面设有阶梯结构,释放挡块在驱动机构的作用下能够前后移动,并通过释放挡块压块进行限位;抛载支撑架上设有连接轴;抛载的一端通过U型槽安装于连接轴,另一端搭接在支撑块上;当释放挡块移动至支撑块上方时,支撑块的一端卡在释放挡块的阶梯结构内,无法旋转,对抛载提供支撑;当释放挡块向后撤离支撑块时,支撑块向下旋转,抛载失去支撑,向下掉落实现抛载。本发明实现了水下无人航行器重力减小与浮力平衡的功能。
技术研发人员:吴树成,周金波,杨振鑫,吴雄,钟自鸣
受保护的技术使用者:宜昌测试技术研究所
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!