一种适用于垂向收放锚链的掣链装置的制作方法
本申请涉及水面船舶锚装置,尤其涉及一种适用于垂向收放锚链的掣链装置。
背景技术:
1、随着机电设备智能化、集成化技术越来越多的应用于船舶设计及制造,无人操纵技术的应用也越来越广泛,机电设备的智能化既极大的节省了人力,又提升了船舶各系统的集成性与可靠性。作为船舶最重要的系统之一:锚泊系统,对于船舶的安全起到了不可代替的作用,为实现无人锚泊系统,需解决关键锚装置由手动操作向自动操作替代的问题。掣链器就是锚泊系统中主要装置之一,掣链器是船舶在航行或抛锚时夹住锚链的装置,其承载能力需达到锚链破断负荷的80%以上,导致其结构往往十分笨重。这其中最常用的是闸刀掣链器,它主要是通过闸刀卡住通过导槽的垂直环止住锚链,其构造十分简单。其主要的操纵方式是通过人力抬起或压下闸刀,另外一边需要一人插入或拔出插销以确保安全,同时还需要一个人操作锚机来调节锚链的实时位置以便闸刀抬起压下。通过以上分析可以看出,简单的一步操作需要3~4人来协同完成,对人力的依赖度高。
技术实现思路
1、本发明旨在提供一种适用于垂向收放锚的止挡掣链器,目的是在正常供电状态下,实现锁止锚链或解脱锁止锚链动作的无人化,在全船失电状态下可手动应急松开锚链的问题。
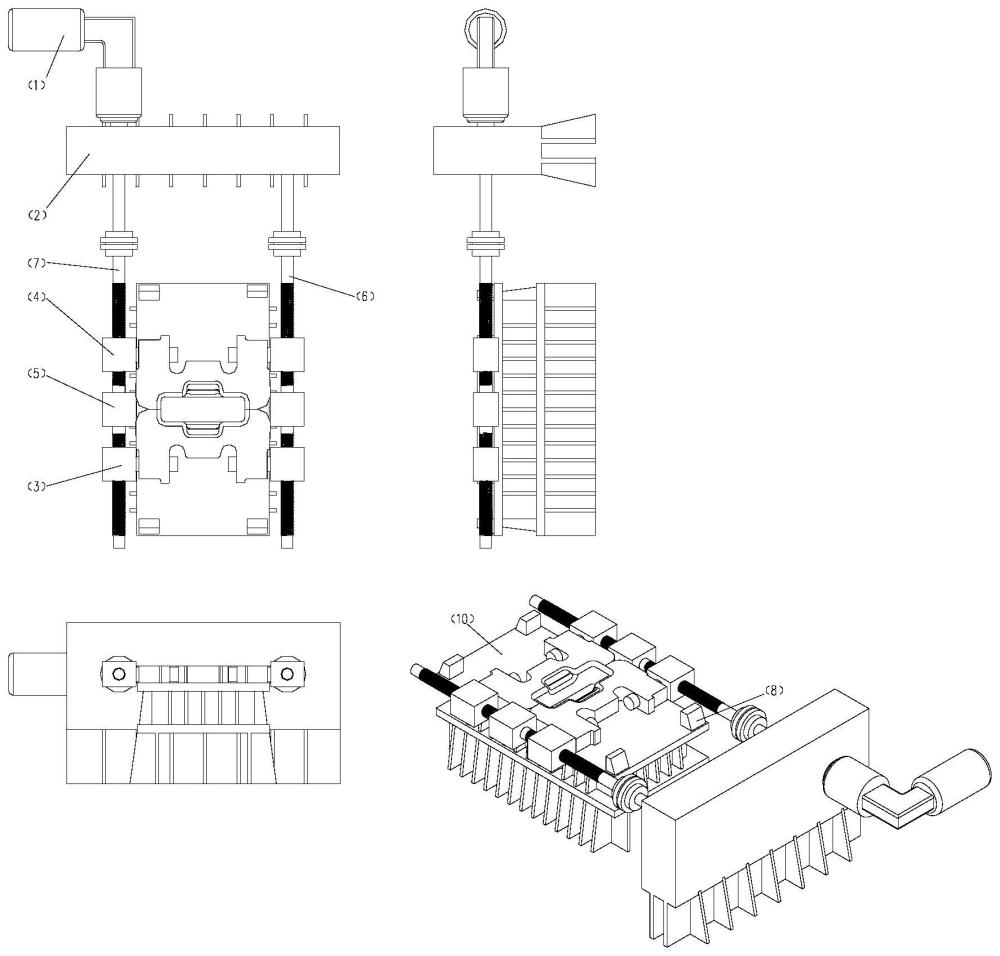
2、本发明实施例提供一种适用于垂向收放锚链的掣链装置,所述装置包括:动力装置、皮带轮、左滑块、右滑块、前螺纹驱动杆、后螺纹驱动杆、限位挡块、应急手操轮和装置底座;
3、所述左滑块、所述右滑块、所述皮带轮、所述前螺纹驱动杆和所述后螺纹驱动杆构成所述装置的运动组件;
4、所述动力装置构成所述装置的电控组件;
5、所述装置能够在船舶航行或驻泊时自动止挡锚链;
6、所述装置能够在船舶失电情况下,通过操作所述应急手操轮,并结合起锚机的手动刹车,实现失电情况下的手动应急抛锚功能。
7、在一些实施例中,所述左滑块和所述右滑块能够在所述前螺纹驱动杆和所述后螺纹驱动杆的驱动下向中心靠拢或向两边滑开,以实现夹紧或松开在中间滑过的锚链。
8、在一些实施例中,所述前螺纹驱动杆和所述后螺纹驱动杆能够驱动所述左滑块和所述右滑块运动,以将来自所述皮带轮的旋转运动转变为所述左滑块和所述右滑块的直线运动,并将所述皮带轮输出的扭矩转变为所述左滑块和所述右滑块的推力,以实现夹紧锚链,且所述前螺纹驱动杆和所述后螺纹驱动杆与所述左滑块和所述右滑块具有自锁功能。
9、在一些实施例中,所述前螺纹驱动杆和所述后螺纹驱动杆由两个参数完全一致但是方向相反的螺纹杆通过固定联接块相连,以使得所述左滑块和所述右滑块在同一螺杆的驱动下向相反的方向运动。
10、在一些实施例中,所述装置底座是位于所述装置底部的一个槽型装置,所述装置底座能够约束滑块的运动保持在一直线上,还能够承受在锚链夹持时来自锚链对滑块的拉力。
11、在一些实施例中,当需要应急抛锚时,在所述皮带轮上安装所述应急手操轮,通过转动所述应急手操轮带动所述皮带轮转动,使所述左滑块和所述右滑块向两边滑开以解脱锚链。
12、本发明上述实施例可实现锁止垂向运动锚链的程序化、自动化,全过程无需人员操作,提升全系统的作业效率及系统的可靠性,同时在全船失电状态下通过手动转动应急解脱手轮,可安全可靠地移动掣链器滑槽完成应急解脱,配合锚机手动刹车协同操作,完成手动应急抛锚。
技术特征:
1.一种适用于垂向收放锚链的掣链装置,其特征在于,所述装置包括:动力装置、皮带轮、左滑块、右滑块、前螺纹驱动杆、后螺纹驱动杆、限位挡块、应急手操轮和装置底座;
2.根据权利要求1所述的适用于垂向收放锚链的掣链装置,其特征在于,所述左滑块和所述右滑块能够在所述前螺纹驱动杆和所述后螺纹驱动杆的驱动下向中心靠拢或向两边滑开,以实现夹紧或松开在中间滑过的锚链。
3.根据权利要求2所述的适用于垂向收放锚链的掣链装置,其特征在于,所述前螺纹驱动杆和所述后螺纹驱动杆能够驱动所述左滑块和所述右滑块运动,以将来自所述皮带轮的旋转运动转变为所述左滑块和所述右滑块的直线运动,并将所述皮带轮输出的扭矩转变为所述左滑块和所述右滑块的推力,以实现夹紧锚链,且所述前螺纹驱动杆和所述后螺纹驱动杆与所述左滑块和所述右滑块具有自锁功能。
4.根据权利要求1所述的适用于垂向收放锚链的掣链装置,其特征在于,所述前螺纹驱动杆和所述后螺纹驱动杆由两个参数完全一致但是方向相反的螺纹杆通过固定联接块相连,以使得所述左滑块和所述右滑块在同一螺杆的驱动下向相反的方向运动。
5.根据权利要求1所述的适用于垂向收放锚链的掣链装置,其特征在于,所述装置底座是位于所述装置底部的一个槽型装置,所述装置底座能够约束滑块的运动保持在一直线上,还能够承受在锚链夹持时来自锚链对滑块的拉力。
6.根据权利要求1所述的适用于垂向收放锚链的掣链装置,其特征在于,当需要应急抛锚时,在所述皮带轮上安装所述应急手操轮,通过转动所述应急手操轮带动所述皮带轮转动,使所述左滑块和所述右滑块向两边滑开以解脱锚链。
技术总结
本发明实施例公开了一种适用于垂向收放锚的止挡掣链器,包括:动力装置(驱动马达或电动机)、皮带轮(兼支撑墙架)、左/右滑块、前/后螺纹驱动杆、限位挡块、应急手操轮组成、装置底座。左/右滑块、皮带轮(兼支撑墙架)、前/后螺纹驱动杆为本装置的主要运动组件,动力装置(驱动马达或电动机)为本装置的电控组件。其功能是:1、在船舶航行或驻泊时自动止挡锚链。2、在船舶失电情况下,通过操作应急手操轮,并结合起锚机的手动刹车,实现失电情况下的手动应急抛锚功能。
技术研发人员:宗砚,周建侯,胡晓芳,王皎,周欢
受保护的技术使用者:中国舰船研究设计中心
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!