一种UUV舱内推拉式设备集成架的制作方法
本发明涉及水下机器人,具体涉及一种uuv舱内推拉式设备集成架。
背景技术:
1、水下机器人(uuv)要在复杂的海洋环境中完成环境探测、目标识别、自主航行等任务,需配置不同性能的设备(航行控制器、任务控制器、航行数据记录仪、任务数据记录仪、应急安全控制器、动力电源控制器、仪器电源控制器、信息交互装置等)以确保系统的信息流与控制流的正常工作。
2、目前,uuv各个设备在uuv载体上的安装位置分散且各个设备与uuv载体直接采用螺钉连接,未考虑各设备间的绝缘。此种安装方式一方面不利于uuv系统电气总体设计,必要时电缆甚至要增加额外长度往复迂回来满足设备之间的电气连接,使得整个系统布线较为零乱。同时,虽然设备零散安装在uuv系统不同的舱段内,但设备之间的电气连接将各个设备在结构上串接为一体,要将某个设备从uuv系统上拆卸下来进行检修或换装时,需要先将uuv系统不同的模块舱在多处进行机械分段和电气分离,费时费力。另一方面,由于设备直接固定在uuv载体上,使得不同设备间存在外壳的金属连接,降低了uuv系统的电磁兼容性,进而影响到整个系统的信息流与控制流工作的可靠性。
技术实现思路
1、有鉴于此,本发明提供了一种uuv舱内推拉式设备集成架,能够实现uuv不同功能的设备集成安装和设备间的绝缘,且集成架可由安装在uuv模块舱内部的导轨整体推拉式进出模块舱,拆装方便。
2、为实现上述目的,本发明技术方案如下:
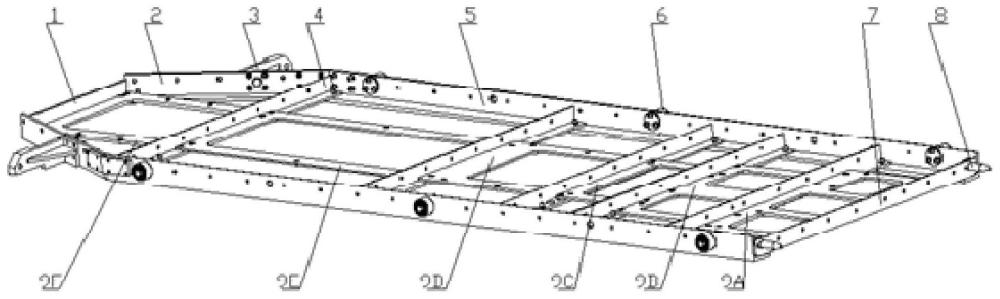
3、一种uuv舱内推拉式设备集成架,包括:横支板a、纵支板a、挡块、横支板b、纵支板b、滚轮、横支板c、销、设备安装板及紧固件;
4、其中,横支板a、纵支板a、横支板b、纵支板b和横支板c通过紧固件连接形成“目”形框架结构;支板均采用标准的l形和t形铝型材制造,根据要安装的设备可增加或减少横支板b的数量;由支板和设备安装板通过螺钉连接形成主体框架,在框架上安装滚轮、销和挡块;集成架采用推拉的方式由滚轮进出uuv壳体,由销和紧固件实现集成架连同设备整体入舱后的轴向限位和固定。
5、其中,设备安装板采用环氧酚醛层玻璃布板制造,并在安装板上预埋钢制螺套提供设备的安装接口和加工沉头孔;通过沉头螺钉将安装板与集成架框架固连。
6、其中,其特征在于,在纵支板a上安装挡块,且在挡块上设计有与uuv壳体连接的安装接口;在横支板c上安装销,在纵支板b上安装滚轮。
7、其中,集成架由滚轮沿导轨推入uuv壳体,销与壳体导轨上的孔座配合,挡块用紧固件与uuv壳体固定,从而将整个集成架及设备通过滚轮支承在导轨上。
8、其中,在横支板a、纵支板a、横支板b、纵支板b和横支板c上均设计有一系列的小孔。
9、有益效果:
10、1、本发明的集成架包括:横支板a、纵支板a、挡块、横支板b、纵支板b、滚轮、横支板c、销、设备安装板及紧固件,框架结构简单,制造容易,成本低,强度高,刚性好;本发明集成架的支板均采用标准的l形和t形铝型材制造,根据要安装的设备可增加或减少横支板b的数量,适用不同的场景。
11、2、本发明优选实施方式中,设备安装板采用环氧酚醛层玻璃布板制造,在安装板上预埋钢制螺套提供设备的安装接口和加工沉头孔,通过沉头螺钉将安装板与集成架框架固连。由于设备安装板采用非金属材料制造且安装板与集成架框架连接的螺钉不与设备相接触,这样即可满足设备与集成架之间的绝缘性要求。
12、3、本发明优选实施方式中,在横支板a、纵支板a、横支板b、纵支板b、横支板c上均设计有一系列的小孔,可将设备间连接的电缆用扎带绑定,电缆走线清晰美观。
技术特征:
1.一种uuv舱内推拉式设备集成架,其特征在于,包括:横支板a、纵支板a、挡块、横支板b、纵支板b、滚轮、横支板c、销、设备安装板及紧固件;
2.如权利要求1所述的集成架,其特征在于,设备安装板采用环氧酚醛层玻璃布板制造,并在安装板上预埋钢制螺套提供设备的安装接口和加工沉头孔;通过沉头螺钉将安装板与集成架框架固连。
3.如权利要求1或2所述的集成架,其特征在于,其特征在于,在纵支板a上安装挡块,且在挡块上设计有与uuv壳体连接的安装接口;在横支板c上安装销,在纵支板b上安装滚轮。
4.如权利要求3所述的集成架,其特征在于,集成架由滚轮沿导轨推入uuv壳体,销与壳体导轨上的孔座配合,挡块用紧固件与uuv壳体固定,从而将整个集成架及设备通过滚轮支承在导轨上。
5.如权利要求1、2、或4所述的集成架,其特征在于,在横支板a、纵支板a、横支板b、纵支板b和横支板c上均设计有一系列的小孔。
技术总结
本发明涉及水下机器人技术领域,具体涉及一种UUV舱内推拉式设备集成架,能够实现UUV不同功能的设备集成安装和设备间的绝缘,且集成架可由安装在UUV模块舱内部的导轨整体推拉式进出模块舱,拆装方便。本发明的集成架包括:横支板A、纵支板A、挡块、横支板B、纵支板B、滚轮、横支板C、销、设备安装板及紧固件,框架结构简单,制造容易,成本低,强度高,刚性好;2、本发明集成架的支板均采用标准的L形和T形铝型材制造,根据要安装的设备可增加或减少横支板B的数量,适用不同的场景。
技术研发人员:金碧霞,詹传明,彭阿静,程姝
受保护的技术使用者:宜昌测试技术研究所
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!