一种便于操控的水域救援机器人的制作方法
本技术涉及水域救援机器人,具体为一种便于操控的水域救援机器人。
背景技术:
1、在以往水下救援工作中,水域环境复杂,水流湍急,潜水人员体力限制等这些因素都成为搜救阻碍,且超过30米的水下更是有很大的安全风险,新科技的出现,给水下救援带来了新的希望,水下救援机器人可以通过搭载多种搜寻、探测传感器,通过智能控制平台的远程在水中自由移动,并实时搜寻数据,在确定目标之后,通过搭载打捞、救援机械手臂进行水下搜救,并返回搜寻船,水下救援机器人使用高扭矩同步驱动装置,其附有一个有微处理器控制的3段静脉动力管理系统潜水喷射的马达,坚持仅用高品质零件及特殊高级涂料制造,因此极为坚固耐用且无需维修,经10000小时全负载操作的耐力测试后,完全无故障性能降低的问题。
2、现有技术中,目前常见的便于操控的水域救援机器人在使用时,设备大多只是发现需救援人员,导致设备实用性较差,且现有设备在使用时无法装载一些设备,导致了水下人员在被困住时没有合适工具脱困。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种便于操控的水域救援机器人,具备了能够在救出人员后迅速返回水面,使得设备实用性较好,且设备能够装载工具,使得被困人员能够脱困的优点,解决了设备大多只是发现需救援人员,导致设备实用性较差,且现有设备在使用时无法装载一些设备,导致了水下人员在被困住时没有合适工具脱困的问题。
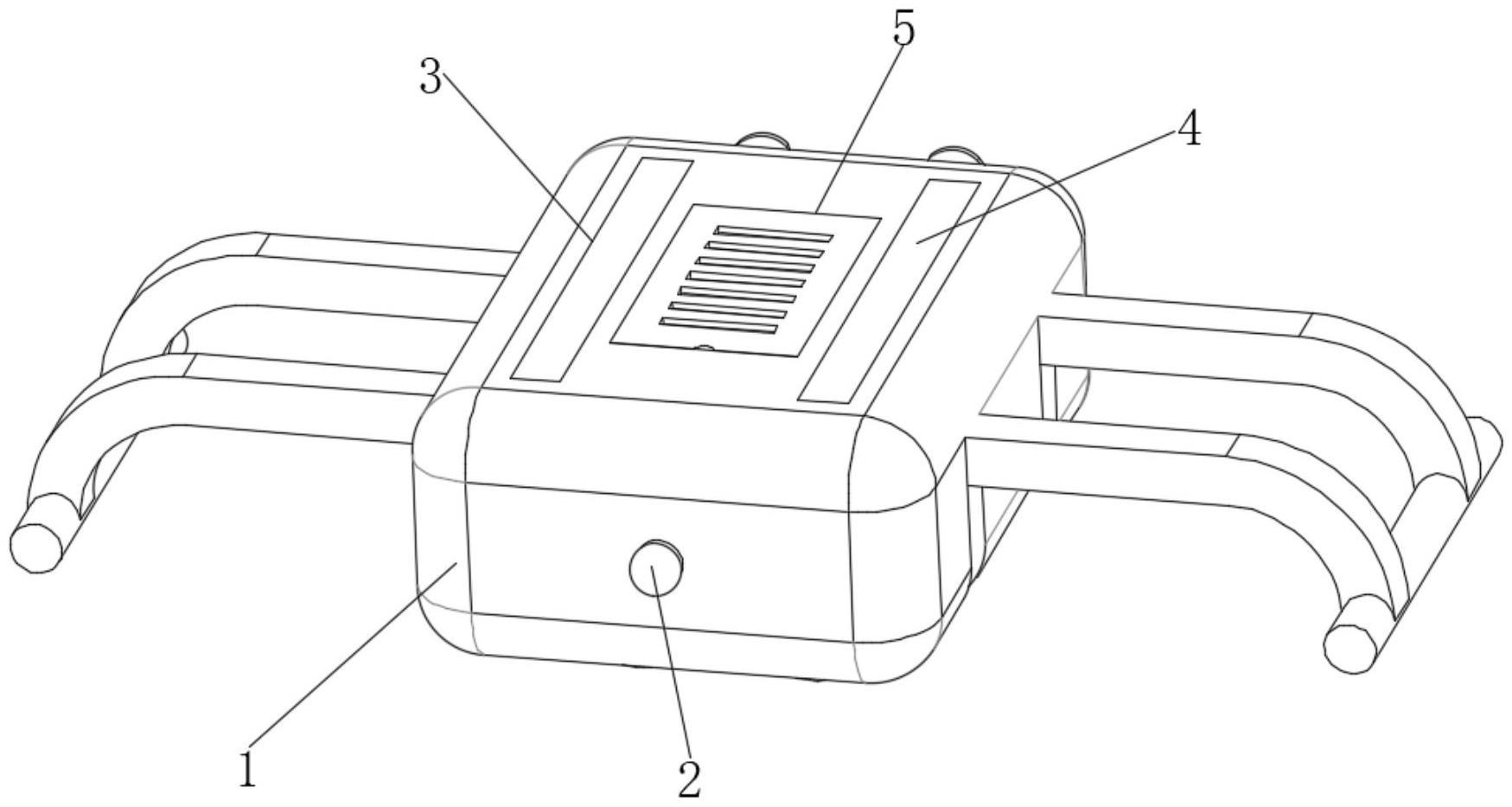
2、本实用新型提供如下技术方案:一种便于操控的水域救援机器人,包括:主体,所述主体的正面固定安装有摄像头,所述主体顶部的两侧开设有第一容纳槽,所述第一容纳槽内壁的底部固定安装有救援浮袋,所述主体顶部的中间开设有凹槽,所述凹槽内壁的侧面活动连接有盖板,所述盖板的两端固定连接有第一连接辊,所述盖板通过第一连接辊与凹槽内壁的侧面活动连接,所述盖板的顶部开设有通槽,所述通槽延伸至盖板的底部,所述主体的侧面开设有第二容纳槽,所述第二容纳槽内壁的侧面活动连接有支撑腿,所述支撑腿两侧皆固定连接有第二连接辊,所述支撑腿通过第二连接辊与第二容纳槽活动连接,所述支撑腿的底部固定连接有底杆,所述主体的底部开设有第三容纳槽,所述第三容纳槽内壁的顶部固定连接有夹持块,所述夹持块内壁的表面活动连接有氧气罐,所述氧气罐的顶部固定连接有连接管,所述连接管的另一端延伸穿过主体的内部与救援浮袋固定连接,所述主体的背面设置有输出轴,所述输出轴的另一端固定连接有扇叶。
3、优选的,所述第一容纳槽和救援浮袋的数量有两个,且两个第一容纳槽和救援浮袋分别设置与凹槽的两侧。
4、优选的,所述通槽的数量有若干个,且若干个通槽均匀排列在盖板的顶部。
5、优选的,所述夹持块和氧气罐的数量有两个,且两个夹持块和氧气罐皆设置于第三容纳槽内。
6、优选的,所述支撑腿的数量有四个,且四个支撑腿分别分布于主体的两侧。
7、优选的,所述盖板顶部的一端开设有圆槽,所述圆槽延伸至盖板的底部。
8、与现有技术对比,本实用新型具备以下有益效果:
9、1、该便于操控的水域救援机器人,通过第一容纳槽、救援浮袋、支撑腿、底杆、夹持块、氧气罐和连接管的设置,在使用时,通过第一容纳槽的设置使得救援浮袋能够被安装以及收纳,通过支撑腿和底杆的设置使得在地面时设备能够站立,在救援时可以收起将被困人员架起,通过夹持块的设置使得氧气罐能够被安装,通过氧气罐和连接管的设置使得救援浮袋能够充气带动设备浮起,达到了能够在救出人员后迅速返回水面,使得设备实用性较好的效果,解决了设备大多只是发现需救援人员,导致设备实用性较差的问题。
10、2、该便于操控的水域救援机器人,通过凹槽、盖板、第一连接辊、通槽和圆槽的设置,在使用时,通过凹槽的设置使得设备能够装载工具,通过第一连接辊的设置使得盖板能够被固定以及打开,通过圆槽的设置使得盖板方便打开,达到了设备能够装载工具,使得被困人员能够脱困的效果,解决了现有设备在使用时无法装载一些设备,导致了水下人员在被困住时没有合适工具脱困的问题。
技术特征:
1.一种便于操控的水域救援机器人,包括:主体(1),其特征在于,所述主体(1)的正面固定安装有摄像头(2),所述主体(1)顶部的两侧开设有第一容纳槽(3),所述第一容纳槽(3)内壁的底部固定安装有救援浮袋(4),所述主体(1)顶部的中间开设有凹槽(5),所述凹槽(5)内壁的侧面活动连接有盖板(6),所述盖板(6)的两端固定连接有第一连接辊(7),所述盖板(6)通过第一连接辊(7)与凹槽(5)内壁的侧面活动连接,所述盖板(6)的顶部开设有通槽(8),所述通槽(8)延伸至盖板(6)的底部,所述主体(1)的侧面开设有第二容纳槽(10),所述第二容纳槽(10)内壁的侧面活动连接有支撑腿(11),所述支撑腿(11)两侧皆固定连接有第二连接辊(12),所述支撑腿(11)通过第二连接辊(12)与第二容纳槽(10)活动连接,所述支撑腿(11)的底部固定连接有底杆(13),所述主体(1)的底部开设有第三容纳槽(14),所述第三容纳槽(14)内壁的顶部固定连接有夹持块(15),所述夹持块(15)内壁的表面活动连接有氧气罐(16),所述氧气罐(16)的顶部固定连接有连接管(17),所述连接管(17)的另一端延伸穿过主体(1)的内部与救援浮袋(4)固定连接,所述主体(1)的背面设置有输出轴(18),所述输出轴(19)的另一端固定连接有扇叶(19)。
2.根据权利要求1所述的一种便于操控的水域救援机器人,其特征在于,所述第一容纳槽(3)和救援浮袋(4)的数量有两个,且两个第一容纳槽(3)和救援浮袋(4)分别设置与凹槽(5)的两侧。
3.根据权利要求1所述的一种便于操控的水域救援机器人,其特征在于,所述通槽(8)的数量有若干个,且若干个通槽(8)均匀排列在盖板(6)的顶部。
4.根据权利要求1所述的一种便于操控的水域救援机器人,其特征在于,所述夹持块(15)和氧气罐(16)的数量有两个,且两个夹持块(15)和氧气罐(16)皆设置于第三容纳槽(14)内。
5.根据权利要求1所述的一种便于操控的水域救援机器人,其特征在于,所述支撑腿(11)的数量有四个,且四个支撑腿(11)分别分布于主体(1)的两侧。
6.根据权利要求1所述的一种便于操控的水域救援机器人,其特征在于,所述盖板(6)顶部的一端开设有圆槽(9),所述圆槽(9)延伸至盖板(6)的底部。
技术总结
本技术涉及水域救援机器人技术领域,且公开了一种便于操控的水域救援机器人,包括:主体,所述主体的正面固定安装有摄像头,所述主体顶部的两侧开设有第一容纳槽,所述第一容纳槽内壁的底部固定安装有救援浮袋,所述主体顶部的中间开设有凹槽。该便于操控的水域救援机器人通过第一容纳槽、氧气罐和连接管的设置,在使用时,第一容纳槽使得救援浮袋能够被安装以及收纳,支撑腿和底杆使得在地面时设备能够站立,夹持块的设置使得氧气罐能够被安装,氧气罐和连接管的设置使得救援浮袋能够充气带动设备浮起,达到了能够在救出人员后迅速返回水面,使得设备实用性较好的效果,解决了设备大多只是发现需救援人员,导致设备实用性较差的问题。
技术研发人员:石涧,石岩
受保护的技术使用者:天津福然救援装备有限公司
技术研发日:20230109
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!