一种水下机器人的制作方法
本技术涉及水下探测,尤其涉及一种水下机器人。
背景技术:
1、随着科学的进步,对海洋进行探索,需要一种水下机器人对海洋进行探索,方便使用者对水中的观察。
2、现有的技术诸如公开号为cn216424710u的实用新型,该专利公开了一种水下机器人,由框架、密封控制舱、水下推进器、把手、浮材、配重块、控制舱、固定角件组成;密封控制舱通过固定角件固定在框架中,浮材通过把手固定在框架上,配重块固定在框架底部,可通过在底板上的不同位置安装不同数量的配置块来调节水下机器人在水中的浮力状态;控制系统装在密封控制舱内;两个水下推进器水平安装在框架尾部两侧,两个水下推进器安装在框架中部两侧,但由于工艺和材料等等的限制,制造成本普遍较为高昂;并且由于目前市面上绝大部分工业级的水下机器人均是又大又重,而消费级水下机器人虽成本低、体积小,但可靠性较低、整体采用灌胶密封的方式(难以拆装改造)且软硬件资料均不开源,不利于人们学习了解水下机器。
3、但是水下机器人在使用时,使用者将设备放置在水中,随即启动设备风机运行带动设备在水中移动运行,但是设备在使用时,风机的螺旋桨容易吸入杂物造成设备无法运行的情况。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在风机堵塞无法使用的缺点,而提出的一种水下机器人。
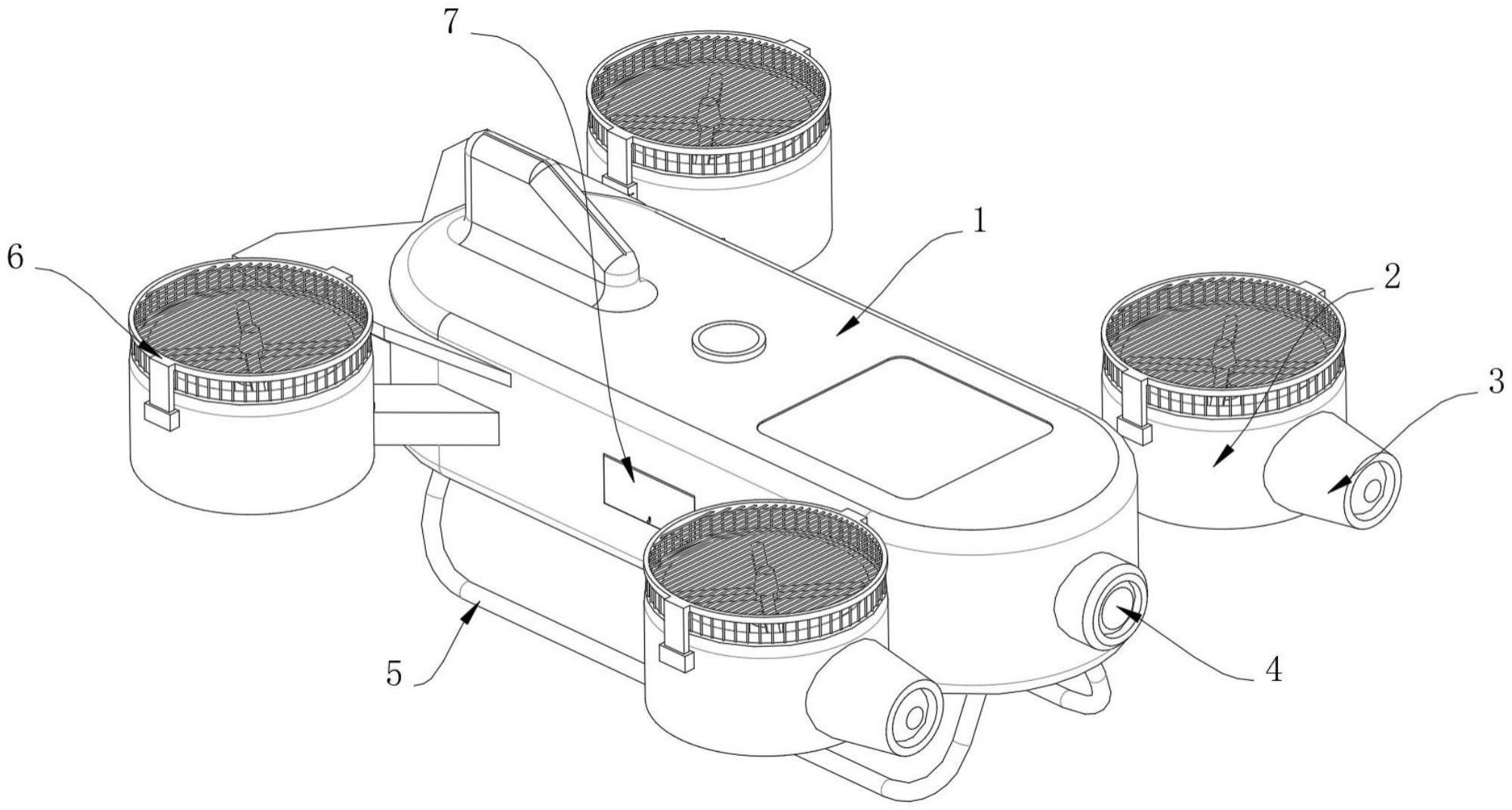
2、为了实现上述目的,本实用新型采用了如下技术方案:一种水下机器人,包括主体和防护装置,所述主体的侧面固定连接有风机,所述主体的侧面固定连接有摄像头,所述风机的侧面固定连接有探照灯,所述主体的下表面固定连接有支杆,所述防护装置设置在风机的表面,所述防护装置包括防护罩和限制块,所述限制块与风机的侧面固定连接,所述防护罩与风机的上表面设置,所述防护罩与限制块的内壁卡接,所述限制块的内壁开设有限制孔,所述防护罩的侧面开设有限制槽,所述限制槽的内壁滑动连接有限制杆,所述限制杆与限制孔的内壁卡接。
3、优选的,所述限制杆远离限制孔的一端固定连接有第一弹簧,所述第一弹簧远离限制杆的一端与限制槽的内壁固定连接,设置限制杆,可以对防护罩进行限制,降低了设备在使用时,防护罩脱离风机,造成风机堵住杂物无法使用的情况。
4、优选的,所述限制块的侧面开设有压槽,所述压槽的内壁滑动连接有压杆,设置压杆,便于对限制杆进行移动。
5、优选的,所述压杆的一端固定连接有第二弹簧,所述第二弹簧远离压杆的一端与压槽的内壁固定连接,设置第二弹簧,便于对压杆施加弹力。
6、优选的,所述主体的表面设置有保护装置,所述保护装置包括保护板和卡槽,所述保护板与主体的表面转动连接,所述卡槽开设在主体的内壁,所述保护板的表面开设有卡孔,所述卡孔的内壁滑动连接有卡杆,所述卡杆的一端与卡槽的内壁卡接,所述卡杆远离卡槽的一端固定连接有第三弹簧,所述第三弹簧远离卡杆的一端与卡孔的内壁固定连接,所述保护板的侧面开设有转槽通过设置保护板,可以对充电口进行保护,降低了设备在使用时,充电口容易进入水,造成短路无法使用的情况出现。
7、优选的,所述主体的内壁固定连接有转杆,所述转杆与转槽的内壁转动连接,设置转杆,便于对保护板提供转轴。
8、优选的,所述转杆的表面套设连接有第四弹簧,所述第四弹簧的两端分别与转槽和主体的内壁固定连接,设置第四弹簧,便于对保护板施加转力。
9、与现有技术相比,本实用新型的优点和积极效果在于:
10、1、本实用新型中,通过设置防护装置,当需要使用设备时,使用者按压压杆,随即压杆移动带动第二弹簧位移形变产生弹力,随即压杆移动带动限制杆移动,随即限制杆移动带动第一弹簧位移形变产生弹力,随即防护罩失去束缚,通过设置防护装置,有效地对风机进行保护,起到了防护风机的作用,降低了设备在使用时,风机的螺旋桨容易搅进杂物,造成风机无法转动的情况出现,提高了设备的使用性。
11、2、本实用新型中,通过设置保护装置,当需要使用设备时,使用者滑动卡杆,随即卡杆移动带动第三弹簧位移形变产生弹力,随即卡杆移动脱离卡槽的内壁,随即保护板失去束缚,随即第四弹簧失去束缚带动保护板转动,通过设置保护装置,有效地对主体表面的充电口进行保护,起到了保护充电口进入水的作用,降低了设备在使用时,充电口的内部容易进入水,造成设备内部短路损坏无法使用的情况出现,提高了设备的使用性。
技术特征:
1.一种水下机器人,包括主体(1)和防护装置(6),其特征在于:所述主体(1)的侧面固定连接有风机(2),所述主体(1)的侧面固定连接有摄像头(4),所述风机(2)的侧面固定连接有探照灯(3),所述主体(1)的下表面固定连接有支杆(5),所述防护装置(6)设置在风机(2)的表面,所述防护装置(6)包括防护罩(61)和限制块(62),所述限制块(62)与风机(2)的侧面固定连接,所述防护罩(61)与风机(2)的上表面设置,所述防护罩(61)与限制块(62)的内壁卡接,所述限制块(62)的内壁开设有限制孔(64),所述防护罩(61)的侧面开设有限制槽(63),所述限制槽(63)的内壁滑动连接有限制杆(65),所述限制杆(65)与限制孔(64)的内壁卡接。
2.根据权利要求1所述的一种水下机器人,其特征在于:所述限制杆(65)远离限制孔(64)的一端固定连接有第一弹簧(66),所述第一弹簧(66)远离限制杆(65)的一端与限制槽(63)的内壁固定连接。
3.根据权利要求2所述的一种水下机器人,其特征在于:所述限制块(62)的侧面开设有压槽(67),所述压槽(67)的内壁滑动连接有压杆(68)。
4.根据权利要求3所述的一种水下机器人,其特征在于:所述压杆(68)的一端固定连接有第二弹簧(69),所述第二弹簧(69)远离压杆(68)的一端与压槽(67)的内壁固定连接。
5.根据权利要求1所述的一种水下机器人,其特征在于:所述主体(1)的表面设置有保护装置(7),所述保护装置(7)包括保护板(71)和卡槽(72),所述保护板(71)与主体(1)的表面转动连接,所述卡槽(72)开设在主体(1)的内壁,所述保护板(71)的表面开设有卡孔(73),所述卡孔(73)的内壁滑动连接有卡杆(74),所述卡杆(74)的一端与卡槽(72)的内壁卡接,所述卡杆(74)远离卡槽(72)的一端固定连接有第三弹簧(75),所述第三弹簧(75)远离卡杆(74)的一端与卡孔(73)的内壁固定连接,所述保护板(71)的侧面开设有转槽(76)。
6.根据权利要求5所述的一种水下机器人,其特征在于:所述主体(1)的内壁固定连接有转杆(77),所述转杆(77)与转槽(76)的内壁转动连接。
7.根据权利要求6所述的一种水下机器人,其特征在于:所述转杆(77)的表面套设连接有第四弹簧(78),所述第四弹簧(78)的两端分别与转槽(76)和主体(1)的内壁固定连接。
技术总结
本技术涉及水下探测技术领域,具体为一种水下机器人,包括主体和防护装置,所述主体的侧面固定连接有风机,所述主体的侧面固定连接有摄像头,所述风机的侧面固定连接有探照灯,所述主体的下表面固定连接有支杆,所述防护装置设置在风机的表面,所述防护装置包括防护罩和限制块,所述限制块与风机的侧面固定连接,所述防护罩与风机的上表面设置,所述防护罩与限制块的内壁卡接,所述限制块的内壁开设有限制孔,所述防护罩的侧面开设有限制槽。本技术,通过设置防护装置,有效地对风机进行保护,起到了防护风机的作用,降低了设备在使用时,风机的螺旋桨容易搅进杂物,造成风机无法转动的情况出现,提高了设备的使用性。
技术研发人员:郑东海,张崇浩
受保护的技术使用者:德州正鼎机械设备有限公司
技术研发日:20230211
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!