一种新型的抽屉式机构的制作方法
本技术属于水下机器人,特别涉及一种新型的抽屉式机构。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。
2、现阶段行业上泳池清洗机器人都使用上下结构,过滤垃圾集中在某一部位,使用完毕,清洗时候需要拆开机器上下部分,才能进行垃圾清洗,出水时候,漏水速度也较慢,使用是感到笨拙,不方面,而且容易导致机器内部脏污严重。机器拆卸多次后,导致上下整机容易松脱,出现质量问题,可靠性较差。
技术实现思路
1、本实用新型提出一种新型的抽屉式机构,解决了现有技术中的问题。
2、本实用新型的技术方案是这样实现的:
3、一种新型的抽屉式机构,包括机器人主体,所述机器人主体底部还设置有收集舱组件;
4、所述收集舱组件和机器人主体之间为滑动连接;
5、所述收集舱组件还包括收集舱主体,所述收集舱主体底部内侧开设有进水口,所述进水口顶部端口处活动设置有开合板;
6、所述收集舱主体底部内壁上与开合板对应位置设置有安装座,所述安装座与开合板之间设置有转动轴,所述收集舱主体底部外壁与进水口对应位置设置有收集压条。
7、进一步,所述收集舱主体一侧设置有收集舱开合键,所述收集舱开合键底部设置有弹簧,所述收集舱主体内侧与收集舱开合键对应位置开设有安置槽,所述收集舱开合键顶部一体成型有卡接件,所述机器人主体内侧与卡接件对应开设有卡槽。
8、进一步,所述收集舱主体远离收集舱开合键一侧设置有过滤板。
9、进一步,所述进水口截面为梯形,进水口底部开口大于顶部开口。
10、进一步,所述收集压条通过螺丝与收集舱主体之间固定连接。
11、进一步,所述收集压条截面为l型结构。
12、采用了上述技术方案后,本实用新型的有益效果是:
13、1、本实用新型中,通过设置有收集舱组件,收集舱组件分为收集舱主体,其中收集舱主体与机器人主体之间滑动连接,与传统式的泳池清洗机器人不同的地方在于,在需要将垃圾倒出时,只需将垃圾抽屉从侧面抽出,就可以便利的进行清洗,而且垃圾盒轻型化,更便于不同人群使用。清洗垃圾也不涉及整机结构,从而延迟产品寿命;
14、2、本实用新型中,通过设置有收集压条等,收集压条在机器人主体前进时,因为其截面形状为l型,因此在收集舱的底部会产生旋涡,从而加大对池底垃圾的吸力,从而方便将垃圾吸入到收集舱主体中进行存储,此外,配合收集舱主体上所设置的过滤板,对水进行过滤,将垃圾存在舱内,从而方便垃圾的储存。
技术特征:
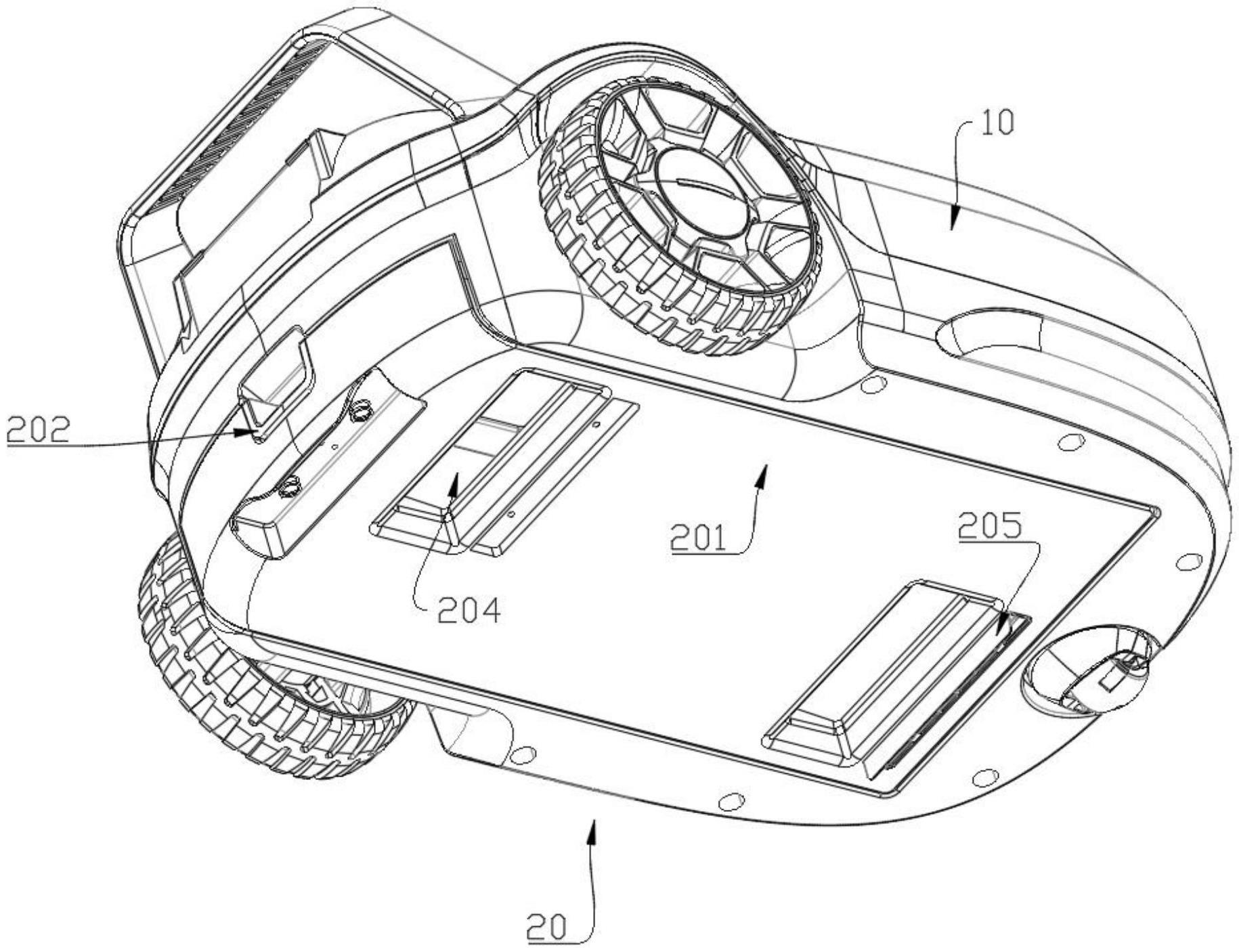
1.一种新型的抽屉式机构,包括机器人主体(10),其特征在于,所述机器人主体(10)底部还设置有收集舱组件(20);
2.根据权利要求1所述的一种新型的抽屉式机构,其特征在于,所述收集舱主体(201)一侧设置有收集舱开合键(202),所述收集舱开合键(202)底部设置有弹簧(208),所述收集舱主体(201)内侧与收集舱开合键(202)对应位置开设有安置槽,所述收集舱开合键(202)顶部一体成型有卡接件(209),所述机器人主体(10)内侧与卡接件(209)对应开设有卡槽。
3.根据权利要求2所述的一种新型的抽屉式机构,其特征在于,所述收集舱主体(201)远离收集舱开合键(202)一侧设置有过滤板(203)。
4.根据权利要求1所述的一种新型的抽屉式机构,其特征在于,所述进水口(204)截面为梯形,进水口(204)底部开口大于顶部开口。
5.根据权利要求1所述的一种新型的抽屉式机构,其特征在于,所述收集压条(205)通过螺丝与收集舱主体(201)之间固定连接。
6.根据权利要求1所述的一种新型的抽屉式机构,其特征在于,所述收集压条(205)截面为l型结构。
技术总结
技术属于水下机器人技术领域,本技术中提出的一种新型的抽屉式机构,包括机器人主体,所述机器人主体底部还设置有收集舱组件;所述收集舱组件和机器人主体之间为滑动连接;所述收集舱组件还包括收集舱主体,所述收集舱主体底部内侧开设有进水口,所述进水口顶部端口处活动设置有开合板;通过设置有收集舱组件,收集舱组件分为收集舱主体,其中收集舱主体与机器人主体之间滑动连接,与传统式的泳池清洗机器人不同的地方在于,在需要将垃圾倒出时,只需将垃圾抽屉从侧面抽出,就可以便利的进行清洗,而且垃圾盒轻型化,更便于不同人群使用。清洗垃圾也不涉及整机结构,从而延迟产品寿命。
技术研发人员:肖内良,王婷婷
受保护的技术使用者:肖内良
技术研发日:20230414
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!