一种多功能智能仿生机器鱼的制作方法
本技术涉及海洋探测设备,具体而言,特别涉及一种多功能智能仿生机器鱼。
背景技术:
1、海洋探测关于人类发展具有关键的意义,而勘察所需各类水下装备、仪器在此中发挥重要的用处。最近几年来,随着机械学和仿生学等学科的疾速发展,水下仿生机器鱼的研发愈来愈遭到研究人员们的关注。仿生机器鱼的研究和应用前景很广,可以实现水下探测、侦察、水下搜救、水下考古、海洋生物观测和水下装备检修等方面研究。
2、现有的仿生机器鱼大都功能单一,只有单一游动功能或水下探测功能或压力侧线感知功能,无法满足多场景应用的需求。
技术实现思路
1、为了弥补现有技术的不足,本实用新型提供了一种多功能智能仿生机器鱼。
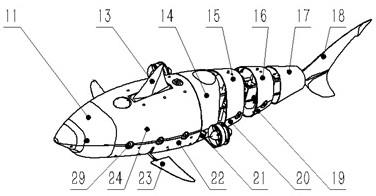
2、本实用新型是通过如下技术方案实现的:一种多功能智能仿生机器鱼,包括从前至后依次为头部模块、控制模块、动力模块和尾鳍模块,控制模块的左右两侧设置有胸鳍模块,其中,头部模块包括外部的头部外壳,头部外壳内部设置有头部安装架,头部安装架的左右两端固定安装有头部压力传感器;
3、控制模块包括外部的控制舱上外壳和控制舱下外壳,控制舱上外壳和控制舱下外壳的内部为控制舱,控制舱的顶部固定安装有第一浮体材料和第二浮体材料,控制舱的底部固定安装有电池舱,控制舱侧壁的前后部分别固定安装有第一侧线压力传感器和第二线压力传感器,控制舱的侧壁上还安装有若干个接插件,控制舱上外壳的顶部安装有背鳍;
4、动力模块包括外部的动力装置上外壳和动力装置下外壳,动力装置上外壳和动力装置下外壳的内部为动力装置,供机器鱼的前进和上下行动;
5、尾鳍模块包括从前至后依次设置的第一节尾鳍、第二节尾鳍、第三节尾鳍和尾鳍,第一节尾鳍包括外部的第一节尾鳍上外壳和第一节尾鳍下外壳,第二节尾鳍包括外部的第二节尾鳍上外壳和第二节尾鳍下外壳,第三节尾鳍包括外部的第三节尾鳍外壳,第一节尾鳍、第二节尾鳍、第三节尾鳍的内部均装配有尾鳍防水舵机装置,尾鳍防水舵机装置包括防水舵机固定件,防水舵机固定件内部装有尾鳍防水舵机,尾鳍防水舵机的前端安装有用于连接上一节尾鳍的尾鳍防水舵机连接件,第一节尾鳍和第二节尾鳍的防水舵机固定件的左右两端均装有尾鳍侧线压力传感器;
6、胸鳍模块包括第一组胸鳍防水舵机、第二组胸鳍防水舵机和胸鳍,第一组胸鳍防水舵机和第二组胸鳍防水舵机分别通过两个胸鳍防水舵机组成一组,第一组胸鳍防水舵机和第二组胸鳍防水舵机之间通过胸鳍防水舵机连接件连接,第一组胸鳍防水舵机通过胸鳍防水舵机固定件安装在控制舱的侧壁上,胸鳍通过胸鳍连接板固定安装第二组胸鳍防水舵机的顶部,并设置在控制舱下外壳的外侧。
7、作为优选方案,头部安装架的前端安装有双目摄像机及水下灯,双目摄像机前方的头部外壳为透明材质。
8、作为优选方案,头部安装架的顶部固定安装有预留搭载平台。
9、作为优选方案,控制舱内集成运动控制系统、数据采集系统、电机驱动系统以及视频分析系统。
10、作为优选方案,动力装置为推进装置或浮力调节装置中的一种。
11、进一步地,推进装置包括主体骨架固定板和三台推进器,主体骨架固定板固定安装在控制舱的后端,主体骨架固定板的左、右两端分别通过推进器固定件水平安装推进器,主体骨架固定板的中部通过推进器固定件垂直安装推进器,动力装置上外壳中部开设有通孔。
12、进一步地,浮力调节装置包括浮力调节控制舱和浮力调节气囊,浮力调节控制舱内设置有推拉杆电机和编码器,编码器通讯连接推拉杆电机,推拉杆电机通过固定螺杆与浮力调节控制舱内的舱底固定,推拉杆电机的输出端通过活塞缸连接浮力调节气囊。
13、作为优选方案,背鳍内部封装有wifi模块。
14、本实用新型由于采用了以上技术方案,与现有技术相比使其具有以下有益效果:
15、1、多种驱动方式复合驱动:具有舵机、推进器、浮力调节等驱动方式。
16、2、多功能于一体:同时具备侧线压力感知功能、浮力调节功能、水下探测功能、水下图像识别功能,并有模块化挂载接口,可根据需求挂载多种传感器
17、3、采用模块化设计,易于拆卸和后期维护。
18、本实用新型的附加方面和优点将在下面的描述部分中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种多功能智能仿生机器鱼,包括从前至后依次为头部模块、控制模块、动力模块和尾鳍模块,控制模块的左右两侧设置有胸鳍模块,其特征在于,所述头部模块包括外部的头部外壳(11),头部外壳(11)内部设置有头部安装架(41),头部安装架(41)的左右两端固定安装有头部压力传感器(29);
2.根据权利要求1所述的一种多功能智能仿生机器鱼,其特征在于,所述头部安装架(41)的前端安装有双目摄像机(30)及水下灯(42),双目摄像机(30)前方的头部外壳(11)为透明材质。
3.根据权利要求1所述的一种多功能智能仿生机器鱼,其特征在于,所述头部安装架(41)的顶部固定安装有预留搭载平台(10)。
4.根据权利要求1所述的一种多功能智能仿生机器鱼,其特征在于,所述控制舱(39)内集成运动控制系统、数据采集系统、电机驱动系统以及视频分析系统。
5.根据权利要求1所述的一种多功能智能仿生机器鱼,其特征在于,所述动力装置为推进装置或浮力调节装置中的一种。
6.根据权利要求5所述的一种多功能智能仿生机器鱼,其特征在于,所述推进装置包括主体骨架固定板(4)和三台推进器(6),主体骨架固定板(4)固定安装在控制舱(39)的后端,主体骨架固定板(4)的左、右两端分别通过推进器固定件(5)水平安装推进器(6),主体骨架固定板(4)的中部通过推进器固定件(5)垂直安装推进器(6),动力装置上外壳(14)中部开设有通孔。
7.根据权利要求5所述的一种多功能智能仿生机器鱼,其特征在于,所述浮力调节装置包括浮力调节控制舱(25)和浮力调节气囊(26),浮力调节控制舱(25)内设置有推拉杆电机(33)和编码器(34),编码器(34)通讯连接推拉杆电机(33),推拉杆电机(33)通过固定螺杆(35)与浮力调节控制舱(25)内的舱底固定,推拉杆电机(33)的输出端通过活塞缸(32)连接浮力调节气囊(26)。
8.根据权利要求1所述的一种多功能智能仿生机器鱼,其特征在于,所述背鳍(13)内部封装有wifi模块(40)。
技术总结
本技术提供了一种多功能智能仿生机器鱼,包括从前至后依次为头部模块、控制模块、动力模块和尾鳍模块,控制模块的左右两侧设置有胸鳍模块,通过本技术的技术方案,1.多种驱动方式复合驱动:具有舵机、推进器、浮力调节等驱动方式;2、多功能于一体:同时具备侧线压力感知功能、浮力调节功能、水下探测功能、水下图像识别功能,并有模块化挂载接口,可根据需求挂载多种传感器;3、采用模块化设计,易于拆卸和后期维护。
技术研发人员:于志伟,路懿平,王玉虎,于敬东,薛钢,王新宝,何心宇,黄健堃,白发刚
受保护的技术使用者:青岛森科特智能仪器有限公司
技术研发日:20230905
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!