一种水下机器人
本技术涉及机器人领域,更具体的说是涉及一种水下机器人。
背景技术:
1、水下机器人是一种工作于水下的极限作业机器人,也称为无人遥控潜水器,其分为有缆遥控潜水器和无缆遥控潜水器两种,是一种非常适合于海底搜索、识别、打捞作业的工具;
2、水下机器人一般在其顶部设置led灯光,并且位于顶部的中心位置,来照明水下机器人的四周,但单个的led灯光对水下机器人移动方向上的照明效果不佳。
技术实现思路
1、针对现有技术存在的不足,本实用新型的目的在于提供一种水下机器人,用于增加水下机器人首尾照明的效果。
2、为实现上述目的,本实用新型提供了如下技术方案:一种水下机器人,包括壳体、补光组件以及设置于所述壳体内的水密舱,所述水密舱与所述壳体之间设置有浮力体,所述补光组件包括至少一个第一补光灯以及至少一个第二补光灯,所述浮力体上开设有通孔,所述第一补光灯设置于所述通孔内,并延伸出所述壳体,所述第二补光灯设置于所述壳体上,所述第一补光灯与所述第二补光灯的朝向相反。
3、作为本实用新型的进一步改进,还包括动力组件,所述动力组件包括多个水平推进器以及多个竖直推进器,所述水密舱上固定连接有支架,所述竖直推进器以及所述水平推进器均与所述支架可拆卸连接。
4、作为本实用新型的进一步改进,所述竖直推进器设置有四个,所述水平推进器设置有两个,所述支架包括两个相互连接的支座,所述支座的两端分别可拆卸连接有所述竖直推进器。
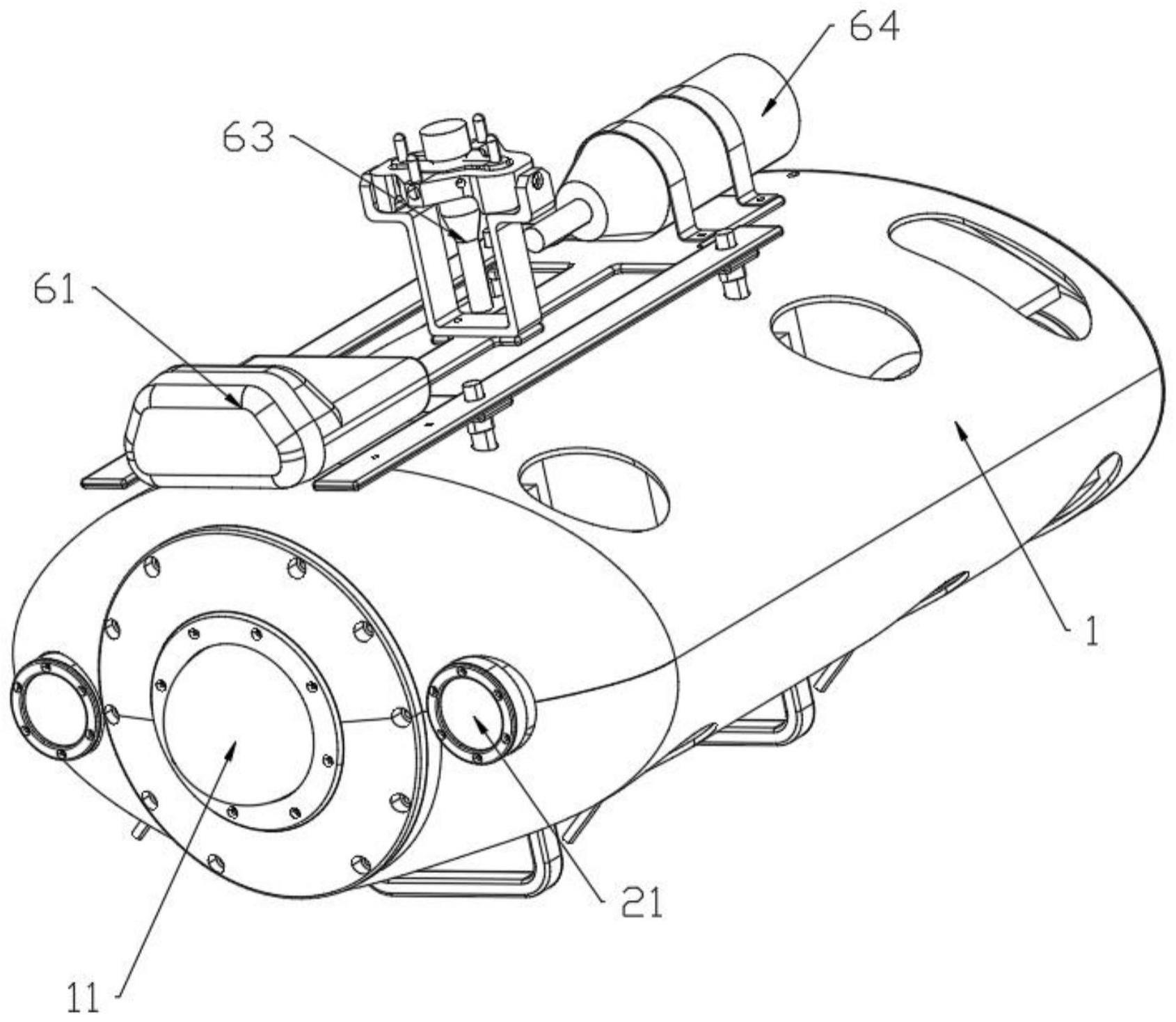
5、作为本实用新型的进一步改进,还包括多功能组件,所述多功能组件包括声呐以及设置于所述支架上的安装座,所述声呐可拆卸连接于所述安装座上。
6、作为本实用新型的进一步改进,所述多功能组件还包括竖直超声探头以及水平超声探头,所述竖直超声探头以及所述水平超声探头均可拆卸连接于所述安装座上。
7、作为本实用新型的进一步改进,所述水密舱的一端设置有第一水下摄像机,所述壳体上设置有第一罩盖,所述第一罩盖盖设所述第一水下摄像机,所述水密舱的另一端设置有第二水下摄像机,所述壳体上可拆卸连接有第二罩盖,所述第二罩盖盖设所述第二水下摄像机。
8、作为本实用新型的进一步改进,所述壳体上设置有多个握把。
9、作为本实用新型的进一步改进,其中两个所述握把设置于所述壳体的底部,两个所述握把设置于所述壳体的尾部。
10、作为本实用新型的进一步改进,所述水密舱底部设置有压力传感器,所述压力传感器延伸出所述壳体。
11、本实用新型的有益效果:本实用新型中设置了第一补光灯和第二补光灯,第一补光灯对对水下机器人前进方向进行补光,第二补光灯对水下机器人后退方向进行补光,使得水下机器人的前后方向均存在补光,有利于第一水下摄像头和第二水下摄像头进行拍摄,并且支座将四个竖直推进器分隔开,进行配重,使得水下机器人的移动更加的稳定。
技术特征:
1.一种水下机器人,其特征在于:包括壳体(1)、补光组件以及设置于所述壳体(1)内的水密舱(3),所述水密舱(3)与所述壳体(1)之间设置有浮力体(4),所述补光组件包括至少一个第一补光灯(21)以及至少一个第二补光灯(22),所述浮力体(4)上开设有通孔,所述第一补光灯(21)设置于所述通孔内,并延伸出所述壳体(1),所述第二补光灯(22)设置于所述壳体(1)上,所述第一补光灯(21)与所述第二补光灯(22)的朝向相反。
2.根据权利要求1所述的一种水下机器人,其特征在于:还包括动力组件(5),所述动力组件(5)包括多个水平推进器(51)以及多个竖直推进器(52),所述水密舱(3)上固定连接有支架(42),所述竖直推进器(52)以及所述水平推进器(51)均与所述支架(42)可拆卸连接。
3.根据权利要求2所述的一种水下机器人,其特征在于:所述竖直推进器(52)设置有四个,所述水平推进器(51)设置有两个,所述支架(42)包括两个相互连接的支座,所述支座的两端分别可拆卸连接有所述竖直推进器(52)。
4.根据权利要求2所述的一种水下机器人,其特征在于:还包括多功能组件,所述多功能组件包括声呐(61)以及设置于所述支架(42)上的安装座(62),所述声呐(61)可拆卸连接于所述安装座(62)上。
5.根据权利要求4所述的一种水下机器人,其特征在于:所述多功能组件还包括竖直超声探头(63)以及水平超声探头(64),所述竖直超声探头(63)以及所述水平超声探头(64)均可拆卸连接于所述安装座(62)上。
6.根据权利要求1所述的一种水下机器人,其特征在于:所述水密舱(3)的一端设置有第一水下摄像机(31),所述壳体(1)上设置有第一罩盖(11),所述第一罩盖(11)盖设所述第一水下摄像机(31),所述水密舱(3)的另一端设置有第二水下摄像机(32),所述壳体(1)上可拆卸连接有第二罩盖(12),所述第二罩盖(12)盖设所述第二水下摄像机(32)。
7.根据权利要求1所述的一种水下机器人,其特征在于:所述壳体(1)上设置有多个握把(13)。
8.根据权利要求7所述的一种水下机器人,其特征在于:其中两个所述握把(13)设置于所述壳体(1)的底部,两个所述握把(13)设置于所述壳体(1)的尾部。
9.根据权利要求1所述的一种水下机器人,其特征在于:所述水密舱(3)底部设置有压力传感器(33),所述压力传感器(33)延伸出所述壳体(1)。
技术总结
本技术涉及机器人领域,公开了一种水下机器人,其技术方案要点是包括壳体、补光组件以及设置于壳体内的水密舱,水密舱与壳体之间设置有浮力体,设置了第一补光灯和第二补光灯,第一补光灯对对水下机器人前进方向进行补光,第二补光灯对水下机器人后退方向进行补光,使得水下机器人的前后方向均存在补光,有利于第一水下摄像头和第二水下摄像头进行拍摄,并且支座将四个竖直推进器分隔开,进行配重,使得水下机器人的移动更加的稳定。
技术研发人员:尚伟燕,吕忠达,赵卓,曹鸿飞,郑伟,王振先
受保护的技术使用者:宁波工程学院
技术研发日:20230516
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!