一种全自动任务型水面无人航行器
本技术涉及水面无人航行器,具体为一种全自动任务型水面无人航行器。
背景技术:
1、水面无人航行器作为水面船舶的一种新型船型,可协助完成对水面的远程无人探测、警备、队伍保护、监视和预警,既可独立完成特定的水面工作任务,也可作为大中型水面船舶的附属装备,水面无人航行器以较低的成本弥补大中型船舶在复杂水域工作的不足,尤其适用于不适合人员工作的危险水域环境科学考察、恶劣环境监测,短途快速运输等。
2、但目前的水面无人航行器存在以下问题和缺陷:
3、1.船体采用一体式的结构,两端缺乏平衡结构,遇到恶劣的天气经常会发生侧翻现象,造成较大的经济损失;
4、2.通过蓄电池供电,续航能力较差,并且航行器在夜间执行巡航任务的过程中,一旦发生故障,很难确定位置,不利于安全可靠的使用;
5、3.在水面作业过程中遇到雷雨天气缺乏避雷防护,容易导致航行器遭受雷击而损坏。
6、所以,提供一种全自动任务型水面无人航行器来解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种全自动任务型水面无人航行器,以解决上述背景技术中提出的船体采用一体式的结构,两端缺乏平衡结构,遇到恶劣的天气经常会发生侧翻现象,造成较大的经济损失的问题。
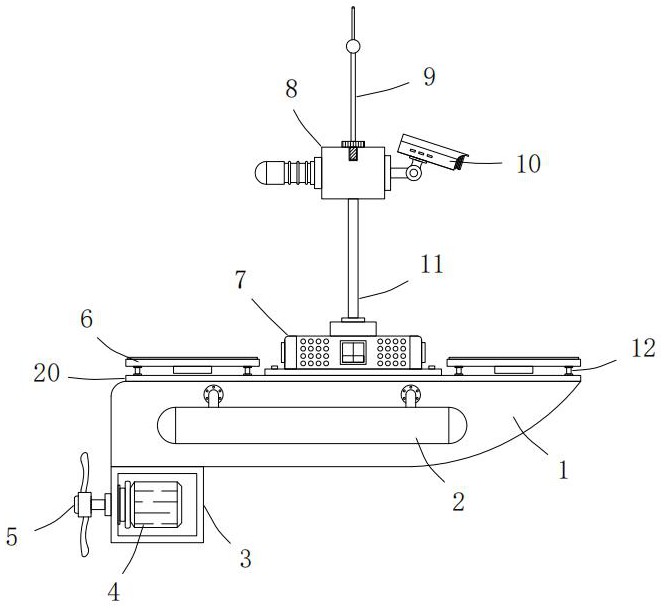
2、为实现上述目的,本实用新型提供如下技术方案:一种全自动任务型水面无人航行器,包括航行器船体,所述航行器船体的顶端固定连接有甲板,所述航行器船体底端的一侧固定连接有固定座,所述固定座的内部固定安装有驱动电机,所述驱动电机的输出端固定连接有螺旋桨,所述甲板顶端的中间位置处固定连接有控制箱,所述控制箱的顶端固定连接有支撑杆,所述支撑杆的顶端固定连接有支撑架,所述航行器船体的两端分别设置有稳定筒,所述稳定筒一端的两侧分别固定连接有固定杆,所述固定杆的两端分别固定连接有安装法兰。
3、优选的,所述固定杆通过安装法兰与航行器船体固定连接,所述航行器船体两端的稳定筒对称设置。
4、优选的,所述支撑架的一侧固定连接有安装架,所述安装架的一侧活动铰接有巡航记录仪,所述支撑架的另一侧固定安装有故障报警灯,所述甲板顶端的两侧分别固定连接有固定架。
5、优选的,所述固定架的顶端固定连接有太阳能电池板。
6、优选的,所述控制箱的内部固定安装有控制电路板,所述巡航记录仪和故障报警灯分别通过导线与控制电路板电性连接。
7、优选的,所述支撑架的顶端设置有避雷器,所述避雷器的底端固定连接有旋钮,所述旋钮的底端固定连接有螺柱,所述支撑架顶端的中心位置处设置有螺孔。
8、优选的,所述螺柱与螺孔之间相互配合,且螺柱螺纹连接在螺孔内部。
9、与现有技术相比,本实用新型的有益效果是:该全自动任务型水面无人航行器船体两端增设辅助平衡结构,即使遇到恶劣的天气也不易发生侧翻,避免较大的经济损失,而且能够转化太阳能蓄电,续航能力较好,并且航行器在夜间执行巡航任务的过程中发生故障,便于确定位置,有利于安全可靠的使用,另外安装有避雷防护,避免航行器在雷雨天气遭受雷击而损坏。
10、(1)通过设置有稳定筒、固定杆和安装法兰,在使用时,通过固定杆和避雷器在航行器船体的两端各安装一组稳定筒,利用稳定筒能够对航行器船体进行平衡支撑,增强航行器船体在航行过程中的稳定性,这样在航行器船体两端增设辅助平衡结构,即使遇到恶劣的天气也不易发生侧翻,避免较大的经济损失;
11、(2)通过设置有太阳能电池板、控制箱、支撑架、巡航记录仪、支撑杆、固定架、安装架和故障报警灯,在使用时,在固定架上安装太阳能电池板,通过太阳能电池板能够在白天将太阳能转化为电能储存在自身内部,在航行器工作过程中,利用太阳能电池板储存的电能进行供电,大大增强航行器的续航能力,而且航行器在夜间通过巡航记录仪执行巡航任务的过程中,一旦发生不可预知的故障,此时可以打开故障报警灯,通过故障报警灯发出的报警灯光信号来确定航行器的准确位置,这样能够转化太阳能蓄电,续航能力较好,并且航行器在夜间执行巡航任务的过程中发生故障,便于确定位置,有利于安全可靠的使用;
12、(3)通过设置有避雷器、螺柱、旋钮和螺孔,在使用时,通过旋钮将螺柱旋接在螺孔内部,即可将避雷器安装在支撑架的顶部,利用避雷器能够在雷雨天气时起到避雷作用,并且避雷器拆装便捷,便于检修拆换,这样安装有避雷防护,避免航行器在雷雨天气遭受雷击而损坏。
技术特征:
1.一种全自动任务型水面无人航行器,包括航行器船体(1),其特征在于:所述航行器船体(1)的顶端固定连接有甲板(20),所述航行器船体(1)底端的一侧固定连接有固定座(3),所述固定座(3)的内部固定安装有驱动电机(4),所述驱动电机(4)的输出端固定连接有螺旋桨(5),所述甲板(20)顶端的中间位置处固定连接有控制箱(7),所述控制箱(7)的顶端固定连接有支撑杆(11),所述支撑杆(11)的顶端固定连接有支撑架(8),所述航行器船体(1)的两端分别设置有稳定筒(2),所述稳定筒(2)一端的两侧分别固定连接有固定杆(18),所述固定杆(18)的两端分别固定连接有安装法兰(19)。
2.根据权利要求1所述的一种全自动任务型水面无人航行器,其特征在于:所述固定杆(18)通过安装法兰(19)与航行器船体(1)固定连接,所述航行器船体(1)两端的稳定筒(2)对称设置。
3.根据权利要求1所述的一种全自动任务型水面无人航行器,其特征在于:所述支撑架(8)的一侧固定连接有安装架(16),所述安装架(16)的一侧活动铰接有巡航记录仪(10),所述支撑架(8)的另一侧固定安装有故障报警灯(17),所述甲板(20)顶端的两侧分别固定连接有固定架(12)。
4.根据权利要求3所述的一种全自动任务型水面无人航行器,其特征在于:所述固定架(12)的顶端固定连接有太阳能电池板(6)。
5.根据权利要求3所述的一种全自动任务型水面无人航行器,其特征在于:所述控制箱(7)的内部固定安装有控制电路板,所述巡航记录仪(10)和故障报警灯(17)分别通过导线与控制电路板电性连接。
6.根据权利要求1所述的一种全自动任务型水面无人航行器,其特征在于:所述支撑架(8)的顶端设置有避雷器(9),所述避雷器(9)的底端固定连接有旋钮(14),所述旋钮(14)的底端固定连接有螺柱(13),所述支撑架(8)顶端的中心位置处设置有螺孔(15)。
7.根据权利要求6所述的一种全自动任务型水面无人航行器,其特征在于:所述螺柱(13)与螺孔(15)之间相互配合,且螺柱(13)螺纹连接在螺孔(15)内部。
技术总结
本技术公开了一种全自动任务型水面无人航行器,包括航行器船体,所述航行器船体的顶端固定连接有甲板,所述航行器船体底端的一侧固定连接有固定座,所述固定座的内部固定安装有驱动电机。该全自动任务型水面无人航行器通过设置有稳定筒、固定杆和安装法兰,在使用时,通过固定杆和避雷器在航行器船体的两端各安装一组稳定筒,利用稳定筒能够对航行器船体进行平衡支撑,增强航行器船体在航行过程中的稳定性,这样在航行器船体两端增设辅助平衡结构,即使遇到恶劣的天气也不易发生侧翻,避免较大的经济损失,解决的是船体采用一体式的结构,两端缺乏平衡结构,遇到恶劣的天气经常会发生侧翻现象,造成较大经济损失的问题。
技术研发人员:宫荣宝,孙昱浩,杨思远,王孝帅
受保护的技术使用者:山东交通学院
技术研发日:20230707
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!