一种水下船底清理机器人
本申请涉及船舶清理,具体而言,涉及一种水下船底清理机器人。
背景技术:
1、船舶在水中长时间航行,船体下方就会附着大量的海藻,上面会寄居着许多藤壶、牡蛎等海洋生物,日积月累,这些海洋生物的数量就非常庞大。海生物的附着将导致诸多不利条件,尤其是使得船体表面的粗糙度增加,增大了船舶表面的航行阻力,导致船体航行速度降低约10%,燃油成本增加约40%,还会引发外来物种入侵等生态问题。另外附着在船底的海洋生物还会分泌腐蚀性物质,时间长了会破坏船底的涂层和结构,降低船只航行的安全性,所以及时清理水下船体表面具有非常重要的意义。
2、目前,对于小型船只而言,可以将船只拖入船坞进行脱水清理,而对于大型船只而言,由于其体型较大,无法进入船坞,因此需要一种船底清理机器人清理大型船只的底部,现有水下船底清理机器人,例如现有公开号为cn216636783u的一种水下船底清理机器人(中国,授权公告日为20220531),上述方案中,包括壳体,壳体底端左右两侧均设置有行进装置,壳体底端前后两侧均设置有辅助清理装置,辅助清理装置的宽度与左右两侧行进装置之间的间距相适配,壳体底部设置有凹槽,凹槽内设置有主清理装置,壳体顶端设置有与凹槽连通的抽水孔,抽水孔内设置有抽水螺旋桨,行进装置、辅助清理装置、主清理装置和抽水螺旋桨均与一电源电性连接。本实用新型一种水下船底清理机器人可以适用于几乎所有材质的船体,而不是仅仅适用于钢铁船体,可以代替人工实现船底附着生物的清理,同时对清理下来的附着生物进行了破碎灭活处理,有效的避免了物种入侵等生态问题,且处理机构简洁方便、成本低廉、操作简单、省时省力。但是上述方案仍然具有一定的缺陷,发明人经研究发现。上述水下船底清理机器人清理机构没有使力的支撑点,且清理刮刀不易更换,行进机构移动时易被藤壶阻碍行进路线,进而导致清理时间较长且清理效果较差。
技术实现思路
1、为了弥补以上不足,本申请提供了一种水下船底清理机器人,旨在改善上述水下船底清理机器人清理机构没有使力的支撑点,且清理刮刀不易更换,行进机构移动时易被藤壶阻碍行进路线,进而导致清理时间较长且清理效果较差的问题。
2、为实现上述目的,本实用新型解决其技术问题所采用的技术方案为:
3、一种水下船底清理机器人,包括主体结构和清理结构。
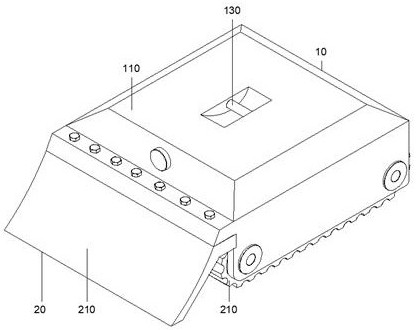
4、所述主体结构包括水下机器人和吸附机构,所述水下机器人底端两侧安装有所述吸附机构,所述清理结构包括刮料件和清涮件,所述刮料件固定端与所述水下机器人一端焊接,刮刀端与所述吸附机构底部一端对齐,所述水下机器人底部设置有所述清涮件。
5、进一步的,所述刮料件包括连接板、卡接槽、刮板、若干固定螺栓和若干锁紧螺母,所述水下机器人一端设有所述连接板,并开设有所述卡接槽,所述刮板固定端与所述卡接槽内壁卡接,表面与所述连接板底端贴合,若干所述固定螺栓底端分别等间距的贯穿所述连接板和所述刮板表面与若干所述锁紧螺母螺栓连接。
6、进一步的,所述清涮件包括水下电机、凹槽和毛刷,所述水下机器人内部安装有所述水下电机,且底部开设有所述凹槽,所述水下电机输出端贯穿所述水下机器人底部延伸至所述凹槽内部,所述水下电机输出端安装有所述毛刷,且所述毛刷设置在所述凹槽内部。
7、进一步的,所述水下机器人包括壳体、摄像头和两个双头电机,所述壳体一端安装有所述摄像头,底部两侧开设有安装槽,两个所述双头电机固定端分别安装在所述壳体内部两端,输出端设于安装槽内部两端。
8、进一步的,所述吸附机构包括两个履带和若干磁吸块,两个所述履带内壁两端分别与两个所述双头电机同向输出端耦合,且侧壁与安装槽内侧壁贴合,两个所述履带外壁等间距的设置有若干所述磁吸块。
9、进一步的,所述主体结构还包括连接件,所述壳体表面设置有所述连接件。
10、进一步的,所述连接件包括弧形槽和连接柱,所述壳体表面开设有所述弧形槽,所述连接柱两端分别与所述弧形槽内壁两侧焊接。
11、有益效果:本申请提供了一种水下船底清理机器人,通过水下机器人一端设有的刮料件,且刮料件刮刀端两侧延伸出机器人两侧,并与船外壁贴合,能够利用刮料件初步的把船底吸附的附着物刮下,同时以水下机器人与船底连接处为支撑点,便于刮板施力,再通过若干固定螺栓贯穿焊接在水下机器人一端的连接板表面和卡接在卡接槽内部的刮板表面与若干锁紧螺母内壁螺栓连接,达到固定刮板的目的,并方便拆卸刮板,且刮板两侧笼罩两个履带一端,能够利用刮板为履带清理掉行进方向的阻碍物,通过水下机器人底部设有的清涮件,且清涮件刷洗端与船外壁紧密贴合,能够利用清涮件把被刮板初步清理过的船壁进行二次清理,再通过启动水下电机带动处于凹槽内部的毛刷旋转,能够更好的清理船底,如此能够有效的解决了,上述水下船底清理机器人清理机构没有使力的支撑点,且清理刮刀不易更换,行进机构移动时易被藤壶阻碍行进路线,进而导致清理时间较长且清理效果较差的问题。
技术特征:
1.一种水下船底清理机器人,其特征在于,包括:
2.根据权利要求1所述的一种水下船底清理机器人,其特征在于,所述刮料件(210)包括连接板(211)、卡接槽(212)、刮板(213)、若干固定螺栓(214)和若干锁紧螺母(215),所述水下机器人(110)一端设有所述连接板(211),并开设有所述卡接槽(212),所述刮板(213)固定端与所述卡接槽(212)内壁卡接,表面与所述连接板(211)底端贴合,若干所述固定螺栓(214)底端分别等间距的贯穿所述连接板(211)和所述刮板(213)表面与若干所述锁紧螺母(215)螺栓连接。
3.根据权利要求2所述的一种水下船底清理机器人,其特征在于,所述清涮件(220)包括水下电机(221)、凹槽(222)和毛刷(223),所述水下机器人(110)内部安装有所述水下电机(221),且底部开设有所述凹槽(222),所述水下电机(221)输出端贯穿所述水下机器人(110)底部延伸至所述凹槽(222)内部,所述水下电机(221)输出端安装有所述毛刷(223),且所述毛刷(223)设置在所述凹槽(222)内部。
4.根据权利要求3所述的一种水下船底清理机器人,其特征在于,所述水下机器人(110)包括壳体(111)、摄像头(112)和两个双头电机(113),所述壳体(111)一端安装有所述摄像头(112),底部两侧开设有安装槽,两个所述双头电机(113)固定端分别安装在所述壳体(111)内部两端,输出端设于安装槽内部两端。
5.根据权利要求4所述的一种水下船底清理机器人,其特征在于,所述吸附机构(120)包括两个履带(121)和若干磁吸块(122),两个所述履带(121)内壁两端分别与两个所述双头电机(113)同向输出端耦合,且侧壁与安装槽内侧壁贴合,两个所述履带(121)外壁等间距的设置有若干所述磁吸块(122)。
6.根据权利要求5所述的一种水下船底清理机器人,其特征在于,所述主体结构(10)还包括连接件(130),所述壳体(111)表面设置有所述连接件(130)。
7.根据权利要求6所述的一种水下船底清理机器人,其特征在于,所述连接件(130)包括弧形槽(131)和连接柱(132),所述壳体(111)表面开设有所述弧形槽(131),所述连接柱(132)两端分别与所述弧形槽(131)内壁两侧焊接。
技术总结
本技术提供了一种水下船底清理机器人,属于船舶清理技术领域。该水下船底清理机器人,包括主体结构和清理结构。主体结构包括水下机器人和吸附机构,水下机器人底端两侧安装有吸附机构,清理结构包括刮料件和清涮件,刮料件固定端与水下机器人一端焊接,刮刀端与吸附机构底部一端对齐,水下机器人底部设置有清涮件,在本技术中,旨在改善上述水下船底清理机器人清理机构没有使力的支撑点,且清理刮刀不易更换,行进机构移动时易被藤壶阻碍行进路线,进而导致清理时间较长且清理效果较差的问题。
技术研发人员:章明文,李玲,张义,李小桥,农瑶,杨顺华
受保护的技术使用者:西南民族大学
技术研发日:20230710
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!