一种救援机器人的制作方法
本技术涉及救援机器人设备,具体为一种救援机器人。
背景技术:
1、救援机器人能够便于在河道内进行搜寻和救援工作,并有效地节省人力消耗,专利申请号为cn201921435741.7的实用新型专利,公开了一种基于红外探测的自主搜寻水上救援机器人,在实施救援时,水上救援机器人能够自动搜寻活着的落水人员,自主规划路线,抵达落水人员身边,无需人工干预,提高救援效率,根据其公开的技术方案来看,现有的救援机器人设备在使用时,一方面,当需要被救的人员的体能较少或者没有体能时,无法及时的将其救援到船体的内侧,进而不利于保障对体能较少甚至没有体能的人员进行救助工作,另一方面,在移动时,救助人员的机构容易阻碍救援机器人的移动速度,进而容易降低进行搜救工作的效率。
2、所以,如何设计一种救援机器人,成为我们当前要解决的问题。
技术实现思路
1、针对现有技术存在的不足,本实用新型目的是提供一种救援机器人,以解决上述背景技术中提出的问题,本实用新型设计合理,使用时较为方便,适用于河道救援工作使用。
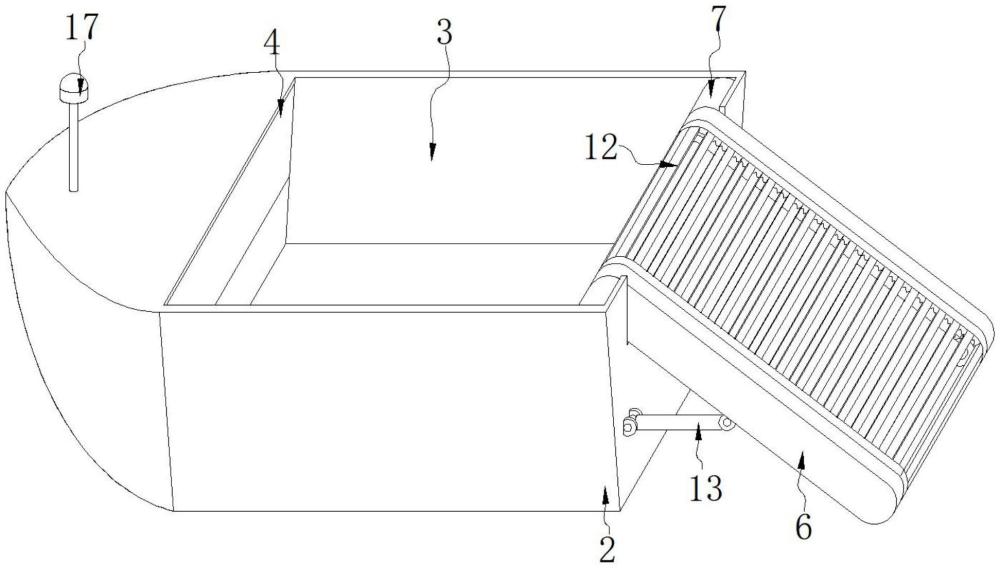
2、为实现上述目的,本实用新型提供如下技术方案:一种救援机器人,包括控制器和船体,所述船体的内侧安装有容纳组件,所述容纳组件包括船舱和储物仓,所述船体的底部安装有移动组件,所述移动组件包括电机二和螺旋桨,所述船体的一侧安装有打捞组件,所述打捞组件包括转板和电机一,所述转板的内侧安装有转动组件,所述转动组件包括链轮和连轴,所述链轮的外侧安装有提升组件,所述提升组件包括链条和条板,所述转板的底部安装有升降机构,所述升降机构包括电动液压杆。
3、进一步的,所述控制器通过螺栓安装在船体的另一侧,所述船舱一体成型在船体的内侧,所述储物仓焊接在船体内的另一侧。
4、进一步的,所述船体的一侧焊接有隔板,所述转板的一端安装在船体的一侧的顶部,所述转板的另一端延伸至船体的一侧的底部。
5、进一步的,所述转板的一端通过转轴安装在船体的内侧,所述电机一通过螺栓安装在转板的一端的外边侧,所述连轴的两端均通过轴承安装在转板的内侧,所述连轴的一端穿过转板并与电机一的输出轴键连接。
6、进一步的,所述链轮分别焊接在连轴的两端的外边侧,所述链条套设在链轮的外边侧,所述链轮与链条相啮合,所述条板的两端均通过螺栓安装在链条上,所述条板均匀分布在链条上,所述转板上安装有内板,所述内板的两侧均焊接在转板的内侧。
7、进一步的,所述电机二通过螺栓安装在船体的内侧,所述螺旋桨安装在船体的外侧,所述螺旋桨的一端通过密封轴穿过船体并与电机二的输出轴键连接。
8、进一步的,所述电动液压杆的一端通过转轴安装在船体的一侧,所述电动液压杆的另一端通过转轴安装在转板的底部。
9、进一步的,所述船体的另一侧的底部安装有蓄电池,所述船体的另一侧的顶部通过螺栓安装有摄像头,所述蓄电池通过电线与控制器连接,所述控制器通过电线与摄像头、电机一、电机二和电动液压杆连接。
10、有益效果:1.该救援机器人在使用时,将控制器通过控制电机二带动螺旋桨工作,使得船体在河道内进行移动,并通过摄像头进行搜寻工作,当搜寻到人员或物品时,将转板的底部移动到人员或物品的下方,电机一通过连轴带动链轮转动,链轮通过链条带动条板在转板的内侧转动,顶部的条板向上移动,进而将人员或物品在内板的支持下向上推动,直到人员或物品移动到船舱的内侧,进而能够有效地对体力不足甚至无法活动的人员或物品进行救援工作,提高救援工作的适应性,并提高对人员的救援效果。
11、2.该救援机器人在移动时,电动液压杆工作产生向外的推动,电动液压杆一端通过船体为支撑点,将转板向上推动,直到转板完全离开水面,进而有效地避免转板、内板、条板等增加船体移动的阻力,保障船体的移动速度,进而提高救援机器人进行搜救工作的效率。
12、3.该救援机器人设计合理,使用时较为高效方便,适用于河道救援工作使用。
技术特征:
1.一种救援机器人,包括控制器(1)和船体(2),所述船体(2)的内侧安装有容纳组件,所述容纳组件包括船舱(3)和储物仓(4),所述船体(2)的底部安装有移动组件,所述移动组件包括电机二(14)和螺旋桨(15),其特征在于:所述船体(2)的一侧安装有打捞组件,所述打捞组件包括转板(6)和电机一(7),所述转板(6)的内侧安装有转动组件,所述转动组件包括链轮(9)和连轴(8),所述链轮(9)的外侧安装有提升组件,所述提升组件包括链条(10)和条板(12),所述转板(6)的底部安装有升降机构,所述升降机构包括电动液压杆(13)。
2.根据权利要求1所述的一种救援机器人,其特征在于:所述控制器(1)通过螺栓安装在船体(2)的另一侧,所述船舱(3)一体成型在船体(2)的内侧,所述储物仓(4)焊接在船体(2)内的另一侧。
3.根据权利要求1所述的一种救援机器人,其特征在于:所述船体(2)的一侧焊接有隔板(5),所述转板(6)的一端安装在船体(2)的一侧的顶部,所述转板(6)的另一端延伸至船体(2)的一侧的底部。
4.根据权利要求3所述的一种救援机器人,其特征在于:所述转板(6)的一端通过转轴安装在船体(2)的内侧,所述电机一(7)通过螺栓安装在转板(6)的一端的外边侧,所述连轴(8)的两端均通过轴承安装在转板(6)的内侧,所述连轴(8)的一端穿过转板(6)并与电机一(7)的输出轴键连接。
5.根据权利要求4所述的一种救援机器人,其特征在于:所述链轮(9)分别焊接在连轴(8)的两端的外边侧,所述链条(10)套设在链轮(9)的外边侧,所述链轮(9)与链条(10)相啮合,所述条板(12)的两端均通过螺栓安装在链条(10)上,所述条板(12)均匀分布在链条(10)上,所述转板(6)上安装有内板(11),所述内板(11)的两侧均焊接在转板(6)的内侧。
6.根据权利要求5所述的一种救援机器人,其特征在于:所述电机二(14)通过螺栓安装在船体(2)的内侧,所述螺旋桨(15)安装在船体(2)的外侧,所述螺旋桨(15)的一端通过密封轴穿过船体(2)并与电机二(14)的输出轴键连接。
7.根据权利要求1所述的一种救援机器人,其特征在于:所述电动液压杆(13)的一端通过转轴安装在船体(2)的一侧,所述电动液压杆(13)的另一端通过转轴安装在转板(6)的底部。
8.根据权利要求7所述的一种救援机器人,其特征在于:所述船体(2)的另一侧的底部安装有蓄电池(16),所述船体(2)的另一侧的顶部通过螺栓安装有摄像头(17),所述蓄电池(16)通过电线与控制器(1)连接,所述控制器(1)通过电线与摄像头(17)、电机一(7)、电机二(14)和电动液压杆(13)连接。
技术总结
本技术公开一种救援机器人,包括控制器和船体,所述船体的内侧安装有容纳组件,所述容纳组件包括船舱和储物仓,所述船体的底部安装有移动组件,所述移动组件包括电机二和螺旋桨,所述船体的一侧安装有打捞组件,所述打捞组件包括转板和电机一,所述转板的内侧安装有转动组件,所述转动组件包括链轮和连轴,该救援机器人能够利用条板将人员或物品向上推动,直到人员或物品移动到船舱内,能够对体力不足甚至无法活动的人员或物品进行救援工作,提高救援工作的适应性,并提高对人员的救援效果,避免转板、内板、条板等增加船体移动的阻力,保障船体的移动速度,进而提高救援机器人进行搜救工作的效率,适用于河道救援工作使用。
技术研发人员:郑之福,向晴海,吕玉琼,高峰,向腾芳
受保护的技术使用者:湖北中交航胜科技有限公司
技术研发日:20230720
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!